一种轮对镟修预警系统及预警方法与流程
- 国知局
- 2024-08-01 09:00:00
本发明涉及轮对镟修,尤其涉及一种轮对镟修预警系统及预警方法。
背景技术:
1、轨道交通的机车、车辆在长期运行过程中,轮对踏面会出现剥离、擦伤、轮缘碾堆、轮辋碾边的伤损;为了不影响车辆运行状态,需要及时对轮对进行镟修,修复车轮踏面圆度,保证列车平稳、高速、安全运行。
2、由于缺乏轮对状态检测手段,目前国内轨道交通领域的机车、车辆轮对镟修修程基本以计划修为主,达到运行里程或时间后进行镟修,这种修程在运用过程中导致如下问题:
3、(1)状态良好轮对过度镟修,导致轮对提早报废;
4、(2)问题轮对带病运行,存在安全事故隐患;
5、(3)大量状态良好轮对被镟修,浪费大量人力物力。
技术实现思路
1、本发明的目的是提供一种轮对镟修预警系统及预警方法。
2、为了实现上述目的,本发明的技术方案是:
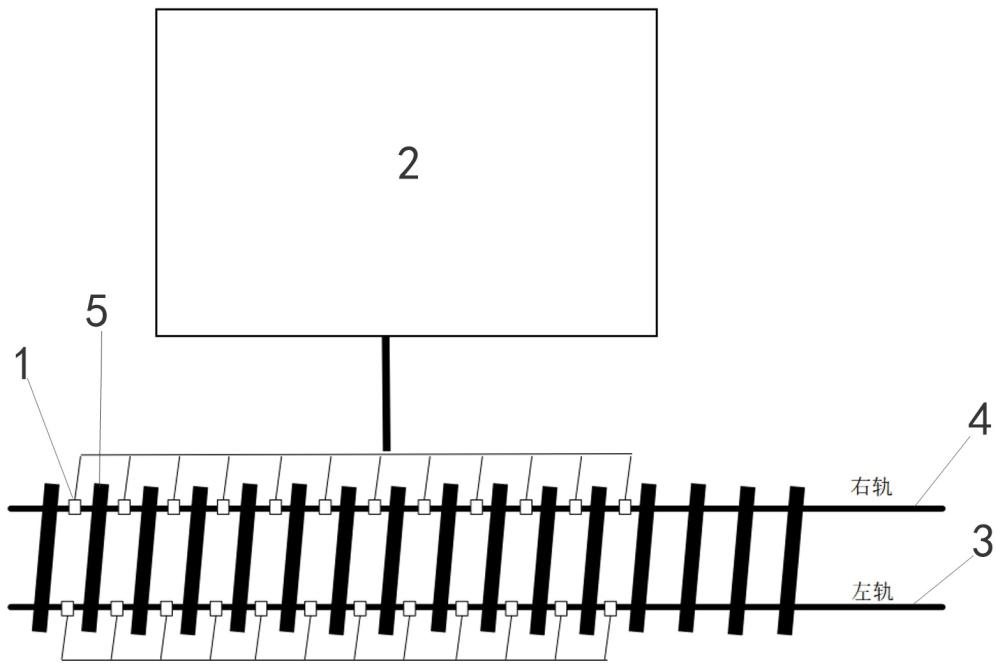
3、一种轮对镟修预警系统,其特征在于,包括车轮状态检测传感器和检测柜,所述车轮状态检测传感器平均分为两组分别钻孔安装于钢轨左右两根轨条的中和轴上,所述车轮状态检测传感器安装于相邻的钢轨轨枕之间,所述检测柜的内部集成设有来车检测系统、信号采集系统、车号识别系统(atis)、算力服务器和通信系统,所述来车检测系统通过激光测距传感器和工业相机检测即将到来的列车,所述激光测距传感器和工业相机均面向列车的来车方向安装,所述激光测距传感器和工业相机均检测到列车来车时,启动车号识别系统和车轮状态传感器,所述车号识别系统通过图像分析的方式识别车组和车辆编号,所述车轮状态检测传感器将某一车轮的数据发送至信号采集系统,所述信号采集系统将数据转为数字量后发送至算力服务器,所述算力服务器分析数字量信号并生成车轮状态评价指标,车轮状态评价指标通过通信系统上传。
4、进一步地,所述来车检测系统安装于检测柜的顶部,实时检测列车来车的方向。
5、进一步地,所述车号识别系统安装于检测柜的后端,以识别轮对的轴位。
6、进一步地,所述信号采集系统设有低通滤波器,以消除车轮状态检测传感器采集信号的高频干扰。
7、一种采用所述轮对镟修预警系统的轮对镟修预警方法,其特征在于,包括以下步骤,
8、步骤s1)当激光测距传感器检测到目标由远及近运动时,计算目标速度;
9、步骤s2)若目标速度和列车的运行规律相符,判断目标为列车;
10、步骤s3)当工业相机捕捉到目标的两个车灯,且车灯光斑由小变大时,判断目标为列车;
11、步骤s4)如果激光测距传感器和工业相机均确认目标为列车,则确认列车到来,启动车号识别系统和车轮状态检测传感器;
12、步骤s5)来车检测系统确定列车来车方向,车号识别系统确定列车各轴的位置,算力服务器对同一轨条上安装的车轮状态检测传感器进行标定;
13、步骤s6)算力服务器根据标定结果对信号进行分析,生成车轮状态评价指标,通过通信系统上传给上位机,由车辆检修人员查看。
14、进一步地,步骤s5具体包括以下步骤,
15、步骤s51)来车检测系统实时检测列车来车方向,车号识别系统识别轮对的轴位,确定车轮相对列车头部的相对位置;
16、步骤s52)根据车轮状态检测传感器安装的位置和来车方向,及车轮相对列车头部的相对位置,记录不同车轮通过车轮状态检测传感器的顺序;
17、步骤s53)各车轮状态检测传感器将记录的车轮数据发送给信号采集系统,信号采集系统将数据转化成数字量后转发给算力服务器;
18、步骤s54)每一车轮通过轨条上所有车轮状态检测传感器后,算力服务器对所有车轮状态检测传感器标定一次。
19、进一步地,步骤s54具体包括以下步骤,
20、步骤s541)车轮状态检测传感器采集的信号经过信号采集系统进行模/数转换后,经过低通滤波器处理以消除高频干扰,滤波公式如下:
21、ymn(z)=h(z)xmn(z);
22、其中,xmn(z)是编号为m的车轮状态检测传感器检测到列车第n个车轮的原始z域信号,h(z)是滤波器,ymn(z)是滤波后的数据z域信号;
23、步骤s542)通过峰峰值对车轮状态检测传感器进行标定,峰峰值检测方式如下:
24、定义max=-9999,min=9999,i=1:l;
25、若ymn(i)>max,则max=ymn(i);
26、若ymn(i)<min,则min=ymn(i);
27、yppmn=max-min;
28、其中,l是编号为m的车轮状态检测传感器检测到列车第n个车轮的数据长度,
29、ymn(i)是编号为m的车轮状态检测传感器,在i时刻检测到列车第n个车轮的数据,
30、yppmn是编号为m的车轮状态检测传感器,检测到列车第n个车轮的峰峰值;
31、步骤s543)对车轮状态检测传感器进行标定,进行归一化处理,方式如下:
32、定义sum=0,m=1:m;
33、sum=sum+yppmn;
34、定义average=sum/m;
35、k(m)=average/yppmn;
36、其中,m为车轮状态检测传感器的总数量,
37、average为同一个车轮通过所有车轮状态检测传感器时,所有车轮状态检测传感器激发的信号的峰峰值平均值,
38、k(m)为编号为m的车轮状态检测传感器的数据调理系数。
39、进一步地,步骤s6具体包括以下步骤,
40、步骤s61)算力服务器根据标定结果进行信号调理;
41、定义i=1:l;
42、令ymn(i)=ymn(i)*k(m);
43、即ymn(i)=ymn(i)*average/yppmn;
44、步骤s62)提取特征信号;
45、步骤s63)计算车轮踏面的伤损当量值。
46、进一步地,步骤s62具体包括以下步骤,
47、步骤s621)算力服务器通过车轮状态的记轴功能和轴距计算列车速度;
48、步骤s622)根据列车速度、轮径、车轮状态检测传感器带宽和数据采集系统采样频率,设计带通滤波器;
49、步骤s623)通过带通滤波器提取反映车轮状态的信号。
50、进一步地,步骤s63具体包括以下步骤,
51、步骤s631)算力服务器通过频谱分析,确定车轮状态信号的频谱结构;
52、步骤s632)利用车速、轮径、轴重和车轮状态信号频谱结构,判断车轮踏面伤损程度和伤损尺寸;
53、步骤s633)根据车轮踏面各个伤损处的伤损程度和伤损尺寸进行加权计算,获得车轮踏面的伤损当量值。
54、本发明通过安装在钢轨轨条中和轴的车轮状态传感器检测以一定速度通过的车轮状态,对车轮状态进行预警,为轨道交通领域的车轮镟修作业提供技术支撑,避免车轮过度镟修或带病运行,保证轨道交通安全运营;
55、本发明通过通过传感器激光测距和相机图像检测两种方式判断来车情况,两种方式互为冗余,避免错误判断。
本文地址:https://www.jishuxx.com/zhuanli/20240718/234380.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。