一种两栖勘探机械四足狗
- 国知局
- 2024-08-02 16:27:50
本技术涉及地质环境勘探,特别涉及一种两栖勘探机械四足狗。
背景技术:
1、我国地质灾害“种类多、影响广、破坏损失严重”,山地在我国陆地面积中的占比高达66.7%。而复杂的地形、多变的气候、频繁的地震等因素,造成我国滑坡、泥石流、崩塌等地质灾害频发。因此,我国高度重视包括山区在内的“防灾减灾、地质勘探”工作的开展,及其相关科技的研发。
2、近年来,移动机器人的自主建图、结构设计、导航定位等方面的研究有着重要的研究潜力和发展前景。而在“防灾减灾、地质勘探”领域,相关科技设备的研发机构并不多,现有的山地灾害监测预警技术也大多针对地表形变,在深部变形监测技术方面存在量程有限、操作复杂或价格昂贵等问题,难以广泛应用,亟需发展低成本、高灵敏度的监测技术和设备,“防灾减灾、地质勘探”科技的发展亟需新鲜科创力量的加入。
3、目前,针对地质勘探和灾情监测评估普遍采用的是无人机遥感技术、地质雷达技术和固定式传感器。
4、在现阶段的地质勘探与监测中,在数据采集方面,有技术采集和人工采集两种类型。
5、技术采集包括无人机遥感、地质雷达、固定式地质传感器三种方式。其中无人机遥感采用无人机传感器收集目标物的电磁波信息,经处理、分析后,识别目标物,揭示其几何、物理性质和相互关系及其变化规律;地质雷达通过发射天线向探测体内发射电磁波,利用接收天线接收来自目标体界面的反射波。在灾害监测中,地质内部信息往往更加重要,但无人机遥感和地质雷达都只能看到宏观的地表情况,且难以精准的探测到山区高植被覆盖率的地方。而固定式传感器放置地点往往依托于经验,前期没有可靠的方案支撑,除此之外还具有不灵活、灾害发生后易损坏的缺点。
6、人工采集耗时长,且所需采集信息的地区多为山地。例如我国西南部的地质灾害高发区,山地地形复杂崎岖、植被茂盛,对地质人员来说很多地方难以到达,难以实现近距离的数据采集和捡样。
7、而在数据分析阶段,大多数数据分析工作依靠人工,工作量极大、耗时长且缺乏标准,分析所依据的信息难以十分系统全面,因此易造成误判、误断等不确定性结果。
技术实现思路
1、本实用新型要解决的技术问题是提供一种两栖勘探机械四足狗以解决现有技术中地质勘探效果过于宏观、勘探工具易损坏以及耗费人工的技术问题。
2、为解决上述技术问题,本实用新型提供如下技术方案:
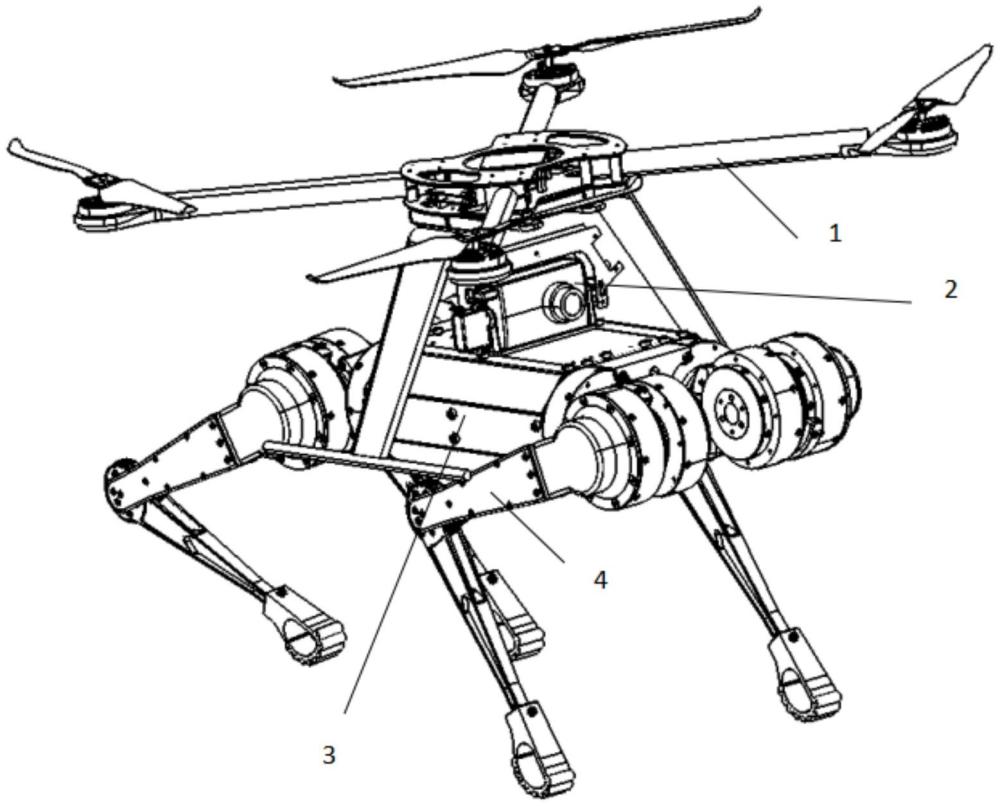
3、一种两栖勘探机械四足狗,包括躯干结构,所述躯干结构安装有足部结构,所述躯干结构内部设有总电机、控制单元,外部安装有飞行结构和拍摄单元,所述控制单元得以控制所述足部结构的大腿部内外翻转,所述大腿部通过履带传动带动所述足部结构的小腿部运动;
4、所述足部结构包括大腿部,所述大腿部一端设有驱动所述大腿部转动的第一电机,所述第一电机通过第一电机固定座连接有驱动所述第一电机固定座转动的所述总电机;所述总电机与所述第一电机固定座之间设有感应转动盘,所述感应转动盘电性连接所述控制单元,所述控制单元控制所述感应转动盘转动以实现所述大腿部内外翻转;
5、所述大腿部与所述小腿部通过齿轮一铰接,所述第一电机输出端设有齿轮二并带着其转动,所述齿轮二通过履带与所述齿轮一传动连接,且所述齿轮二带动所述履带运动间接使所述齿轮一转动,所述齿轮一通过轴承连接所述小腿部并使所述小腿部随着转动。
6、进一步的,所述小腿部底端设有机械足,所述机械足中部镂空。
7、进一步的,所述总电机连接在总电机安装座上,所述总电机安装座设在所述躯干结构端部。
8、进一步的,每个所述第一电机驱动所述大腿部转动的旋转轴线均相互平行,且位于同一水平面内;所述第一电机和所述总电机均与所述控制单元、电源电性连接。
9、进一步的,所述飞行结构包括多旋翼飞行器,所述旋翼飞行器为非共轴式碟形旋翼飞行器,所述多旋翼飞行器包括飞行器架,所述飞行器架上可拆卸安装有飞行器底座,旋翼对称设在所述飞行器底座四周上;所述飞行器底座内设有独立电源为所述多旋翼飞行器提供动力;所述飞行器架两端设有支撑部。
10、进一步的,所述拍摄单元包括拍摄支架,所述拍摄支架可拆卸安装在所述躯干结构外表面上;所述拍摄支架上设有所述飞行器架;所述拍摄支架连接智能控制端,所述智能控制端连接并电性控制摄像机。
11、本实用新型与现有技术相比,至少具有如下有益效果:
12、上述方案中,采用“无人机-四足狗”天地协同、远程操纵的方案,实现全地形全天候作业,四足结构灵活机动,机载设计可进行高空运输,抵抗极端天气等因素,识别边坡细微变形;大区域无人机遥感测绘,高精度四足狗构建地质内部信息,提升地质探测的灵活度以及在高植被覆盖率地区的探测精度,辅助地质人员的探测工作,最大程度的保障地质人员的安全,实现最后一方土地的排查勘探。
技术特征:1.一种两栖勘探机械四足狗,其特征在于,包括躯干结构,所述躯干结构安装有足部结构,所述躯干结构内部设有总电机、控制单元,所述躯干结构外部安装有飞行结构和拍摄单元,所述控制单元得以控制所述足部结构的大腿部内外翻转,所述大腿部通过履带传动带动所述足部结构的小腿部运动;
2.根据权利要求1所述的两栖勘探机械四足狗,其特征在于,所述小腿部底端设有机械足,所述机械足中部镂空。
3.根据权利要求1所述的两栖勘探机械四足狗,其特征在于,所述总电机连接在总电机安装座上,所述总电机安装座设在所述躯干结构端部。
4.根据权利要求1所述的两栖勘探机械四足狗,其特征在于,每个所述第一电机驱动所述大腿部转动的旋转轴线均相互平行,且位于同一水平面内;所述第一电机和所述总电机均与所述控制单元、电源电性连接。
5.根据权利要求1所述的两栖勘探机械四足狗,其特征在于,所述飞行结构包括多旋翼飞行器,所述旋翼飞行器为非共轴式碟形旋翼飞行器,所述多旋翼飞行器包括飞行器架,所述飞行器架上可拆卸安装有飞行器底座,旋翼对称设在所述飞行器底座四周上;所述飞行器底座内设有独立电源为所述多旋翼飞行器提供动力;所述飞行器架两端设有支撑部。
6.根据权利要求5所述的两栖勘探机械四足狗,其特征在于,所述拍摄单元包括拍摄支架,所述拍摄支架可拆卸安装在所述躯干结构外表面上;所述拍摄支架上设有所述飞行器架;所述拍摄支架连接智能控制端,所述智能控制端连接并电性控制摄像机。
技术总结本技术提供一种两栖勘探机械四足狗,属于地质环境勘探技术领域;包括躯干结构,躯干结构安装有四组足部结构,躯干结构内设有总电机、控制单元,外部安装有飞行结构和拍摄单元;控制单元能控制足部结构的大腿部内外翻转,大腿部通过履带传动带动小腿部运动;本技术采用“无人机‑四足狗”天地协同、远程操纵的方案,实现全地形全天候作业,四足结构灵活机动,机载设计可进行高空运输,抵抗极端天气等因素,识别边坡细微变形;大区域无人机遥感测绘,高精度四足狗构建地质内部信息,提升地质探测的灵活度以及在高植被覆盖率地区的探测精度,辅助地质人员的探测工作,最大程度的保障地质人员的安全。技术研发人员:张泽宇,田宏岭,齐俊华,李梦苑,陈平安,薛旭涛,杨欣雨,潘念受保护的技术使用者:北京科技大学技术研发日:20231211技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240718/250795.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。