控制装置、前照灯和投射方法与流程
- 国知局
- 2024-08-02 16:36:15
本发明涉及一种用于车辆前照灯的控制装置,具有用于根据车辆的运行参数控制前照灯的光源单元的控制器件,使得在行车道上成像行驶走向光分布,其中行驶走向光分布在车辆转弯行驶时具有弯曲的引导线。本发明还涉及具有控制装置的用于车辆的前照灯,其具有光源单元,其具有多个能够单个控制的光源和/或能够单个控制的导光元件,和用于按照预先给定的光分布控制光源单元的其它控制器件。本发明还涉及用于控制前照灯的方法,其中为了在行车道上产生行驶走向光分布,根据车辆的行驶动力学传感器信号控制车辆的光源单元。
背景技术:
1、由de102013002212a1已知一种用于车辆的车道保持辅助系统,该车道保持辅助系统设置用于前照灯的控制装置,由此在车辆偏离车道中心时将彩色的光束投射到行车道上,以便在视觉上警告车辆的驾驶员。借助于作为传感器单元的摄像机检测行车道。
2、按照de102020105876a1,使用前照灯用于将警示线或警示箭头投射到行车道标记上,以便向驾驶员发出与行车道的车道中心发生不允许的偏离的信号。
3、由de102015012022a1已知一种用于前照灯的控制装置,借助于该控制装置将引导线投射到行车道上,这些引导线向驾驶员显示车辆朝哪个方向运动。优选设置两条引导线,这两条引导线以对应于车辆宽度的相互距离投射到行车道上。以这种方式可以向驾驶员可视化行驶走向。根据车辆的转向角和车辆的当前速度来实现引导线的可视化,从而在转弯行驶时可以将弯曲的引导线投射到行车道上。
技术实现思路
1、本发明的任务是,给出一种用于前照灯的控制装置、一种前照灯以及一种用于投射引导线的方法,使得所投射的引导线的走向尽可能示出车辆的实际行驶走向或尽可能接近车辆的实际行驶走向。
2、为了解决该任务,结合权利要求1的前序部分,本发明特征在于,控制器件是这样计算的,即:将弯曲的引导线构成为弯曲的轨迹的一部分,该弯曲的轨迹相切地在车辆重心的区域中和/或在横向于车辆纵向方向与重心错开的、车辆侧边缘的区域中设置。
3、本发明的特别的优点在于,在行车道上在视觉上成像的弯曲的引导线的曲率与车辆在弯道中的实际行驶走向一致。本发明的基本构思是:将计算出的、从中推导得出弯曲的引导线的曲率弧和/或曲率圆相切地设置在车辆重心的区域中,而不是例如在前照灯的区域中。车辆的重心通常位于车辆的前侧和后侧之间的中间区域中。如果圆弧轨迹和/或圆形轨迹的切线在该中间区域中延伸——其中该切线优选沿车辆纵向方向或沿车辆纵轴的方向延伸——则由前照灯成像的弯曲的引导线在转弯行驶时反映车辆的实际行驶走向。这是因为在圆弧轨迹和/或圆形轨迹上行驶时,车辆的重心对于车辆的实际行驶走向是决定性的。
4、根据本发明的一种进一步构成,引导线构成为圆形轨迹,其中弯曲的轨迹的曲率半径形成圆半径。有利的是,由此可以借助于数学模型更容易地计算弯曲的引导线。
5、根据本发明的一种进一步构成,行驶走向光分布通过两条平行的引导线形成,其中左侧引导线在车辆的左侧边缘的延长中延伸,而右侧引导线在车辆的右侧边缘的延长中延伸。有利的是,驾驶员由此不仅获得关于当前行驶走向的信息,而且还获得关于车辆的侧向边界的信息,这特别是在建筑工地行驶中或者在狭窄的行车道上是有帮助的。
6、根据本发明的一种进一步构成,包含左侧引导线的左侧弯道轨迹延伸所穿过的、车辆左侧边缘的点和包含右侧引导线的右侧圆形轨迹延伸所穿过的、车辆右侧边缘的点布置在垂直于车辆纵向方向的横向平面中,车辆的重心布置在该横向平面上或在该横向平面附近。因此,当左侧弯道轨迹和右侧弯道轨迹的切线在左侧或右侧边缘的点的附近延伸时,足以将实际行驶走向可视化。
7、为了解决该任务,按照本发明的前照灯具有权利要求9的特征。
8、该前照灯的特别的优点在于,除了预先给定的光分布(例如近光分布或弯道光分布)之外,前照灯产生在弯道中将车辆的准确的行驶走向可视化的行驶走向光分布。
9、根据本发明的一种进一步构成,控制装置安装在前照灯的壳体中并且具有用于控制第一光源单元的第一控制器件,以用于产生行驶走向光分布,和用于控制第二光源单元的第二控制器件,以用于产生预先给定的光分布。因此,前照灯壳体包括至少两个用于产生不同光功能的光模块。有利的是,由此可以简化光源的控制,因为根据光功能实现该控制。
10、为了解决该任务,本发明具有方法权利要求11的特征。
11、按照本发明的方法的特别的优点在于,可以以简单的方式将车辆在弯道中的实际行驶走向可视化。为此,仅由行驶动力学传感器数据计算车辆的转弯半径是足够的,其中将以此为表征的弯道轨迹放置到车辆的重心中。由计算出的中间的转弯半径可以在借助车辆的测量数据的情况下推导得出用于具有左侧引导线的左侧弯道轨迹的第一转弯半径和用于具有右侧引导线的右侧弯道轨迹的第二转弯半径,其中右侧弯道轨迹与竖直的左侧边缘平面作为切线相交,并且右侧引导线与竖直的右侧边缘平面作为切线相交。通过相应地控制前照灯,可以由此将两条平行的引导线投射到行车道上,这两条引导线相互间的距离与车辆宽度一致。有利的是,本发明能够实现简单地计算两条平行的引导线,用于将车辆的行驶走向连续地可视化。
12、根据按照本发明的方法的一种进一步构成,车辆的重心和/或车辆的竖直的左侧边缘平面和竖直的右侧边缘平面被投射到行车道所在的平面上。以这种方式,可以使用简单的数学模型来计算控制信号。
13、根据本发明的一种进一步构成,引导线的长度取决于车辆到行驶在前面的车辆的距离,使得对行驶在前面的车辆不产生不期望的炫目。
14、根据本发明的一种进一步构成,这样计算用于光源单元的控制信号,即:平行的引导线与车辆间隔地开始并且与车辆间隔更远地终止。引导线的端部优选局限在其上还存在行车道的区域上,从而不会使驾驶员混乱。
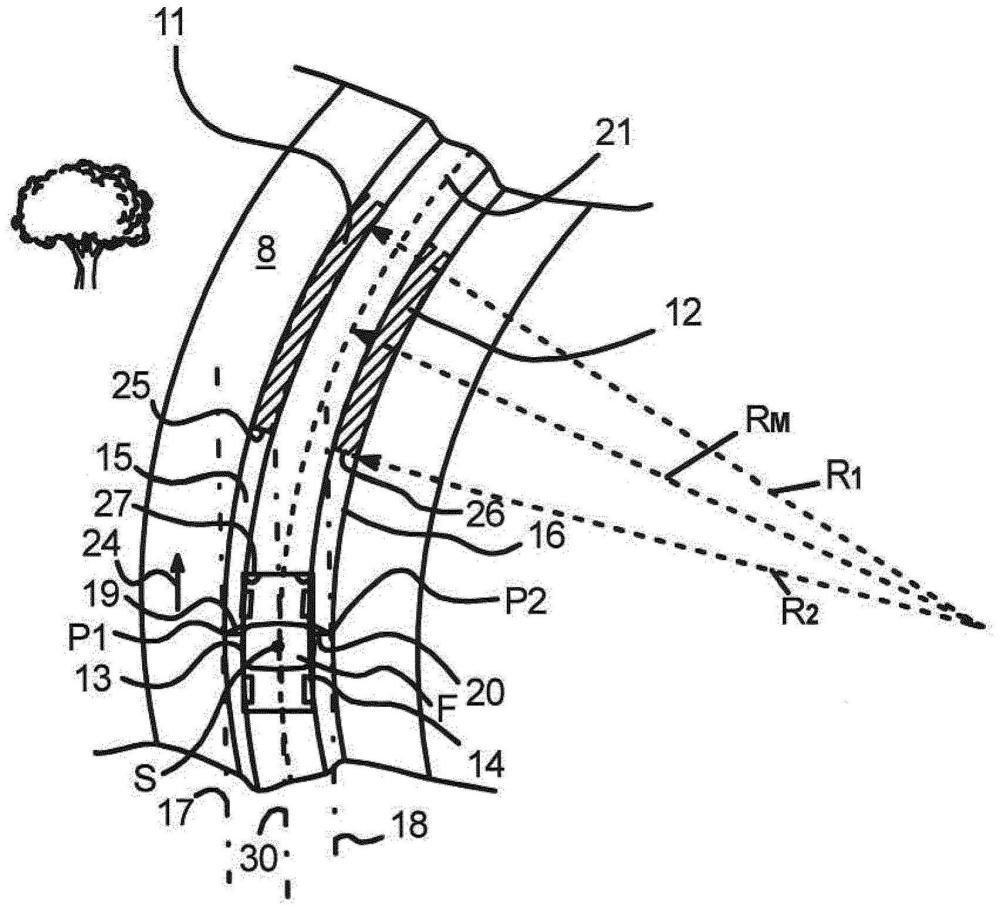
技术特征:1.用于车辆(f)的前照灯的控制装置,所述控制装置具有用于根据车辆(f)的运行参数控制前照灯的光源单元(2)的控制器件(28),使得在行车道(8)上成像行驶走向光分布(9),行驶走向光分布(9)在车辆(f)转弯行驶时具有弯曲的引导线(11、12),其特征在于,控制器件(28)是这样计算的,即:将弯曲的引导线(11、12)构成为弯曲的轨迹(15、16)的一部分,该弯曲的轨迹相切地在车辆(f)重心(s)的区域中和/或在横向于车辆纵向方向(24)与重心(s)错开的、车辆(f)侧边缘(13、14、19、20)的区域中设置。
2.根据权利要求1所述的控制装置,其特征在于,引导线(11、12)所在的弯曲的轨迹(15、16)的切线(17、18)接触车辆(f)的侧边缘(13、14、19、20)的一个点(p1、p2)。
3.根据权利要求1或2所述的控制装置,其特征在于,控制装置(3)能被提供车辆(f)的方向盘角度信号(s1)和/或车速信号(s2)和/或偏航信号(s3)作为运行参数。
4.根据权利要求1至3之一所述的控制装置,其特征在于,引导线(11、12)设置在其上的弯曲的轨迹(15、16)构成为圆形轨迹,所述弯曲的轨迹的曲率半径形成圆半径(rm、rl、rr)。
5.根据权利要求1至4之一所述的控制装置,其特征在于,弯曲的引导线(11、12)构成为圆形轨迹(15、16)上的圆环区段。
6.根据权利要求1至5之一所述的控制装置,其特征在于,行驶走向光分布(9)通过两个平行的引导线(11、12)形成,左侧引导线(11)所在的左侧圆形轨迹(15)的切线(17)与左侧边缘(13)的沿行驶方向(24)来看外部的点相交,并且右侧引导线(12)所在的右侧圆形轨迹(16)的切线(18)与车辆(f)的右侧边缘(14)的沿行驶方向(24)来看外部的点相交。
7.根据权利要求6所述的控制装置,其特征在于,切线(17)在左侧边缘(13)上的接触点和切线(18)在右侧边缘(14)上的接触点布置在垂直于车辆纵向方向(24)的横向平面中,车辆(f)的重心(s)布置在该横向平面上或在该横向平面附近。
8.根据权利要求4至7之一所述的控制装置,其特征在于,切线(17,18)沿车辆纵向方向(24)延伸。
9.用于车辆的前照灯,所述前照灯具有根据权利要求1至8之一所述的控制装置,所述前照灯具有:
10.根据权利要求9所述的前照灯,其特征在于,控制装置(3)安装在前照灯的壳体(1)中,控制装置具有用于控制第一光源单元(2)的控制器件(28),以用于产生行驶走向光分布(9),和用于控制第二光源单元(2')的其它控制器件(29),以用于产生预先给定的光分布(10)。
11.用于控制前照灯的方法,其中,为了在行车道(8)上产生行驶走向光分布(9)而根据车辆(f)的行驶动力学传感器信号(s1、s2、s3)控制车辆(f)的光源单元(2),其特征在于以下步骤:
12.根据权利要求11所述的方法,其特征在于,为了计算第一引导线(11)和第二引导线(12),将车辆(f)的重心(s)投射到行车道(8)所在的水平面上。
13.根据权利要求11或12所述的方法,其特征在于,实时连续地计算控制信号(28)。
14.根据权利要求11至13之一所述的方法,其特征在于,左侧引导线(11)和右侧引导线(12)的长度是恒定的或者取决于车辆(f)到行驶在前面的车辆的距离。
15.根据权利要求1至14之一所述的方法,其特征在于,这样计算控制信号(28),即:左侧引导线(11)的和右侧引导线(12)的第一端(25、26)与车辆(f)前侧(27)间隔地布置,并且左侧引导线(11)的和右侧引导线(12)的长度如此设定尺寸,即:该长度在左侧引导线(11)的或右侧引导线(12)的第一端(25、26)到车辆(f)前侧(27)的距离的三倍和六倍之间的范围中。
技术总结本发明涉及一种用于车辆(F)的前照灯的控制装置,所述控制装置具有用于根据车辆(F)的运行参数控制前照灯的光源单元(2)的控制器件(28),使得在行车道(8)上成像行驶走向光分布(9),其中行驶走向光分布(9)在车辆(F)转弯行驶时具有弯曲的引导线(11、12),其中,控制器件(28)是这样计算的,即:将弯曲的引导线(11、12)构成为弯曲的轨迹(15、16)的一部分,该弯曲的轨迹相切地在车辆(F)重心(S)的区域中和/或在横向于车辆纵向方向(24)与重心(S)错开的、车辆(F)侧边缘(13、14、19、20)的区域中设置。技术研发人员:B·库比察,J·施皮格尔受保护的技术使用者:海拉有限双合股份公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251529.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表