一种稳定控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-08-02 17:04:27
本技术涉及汽车,特别是涉及一种稳定控制方法、装置、设备及存储介质。
背景技术:
1、车身稳定系统是一种主动安全系统,例如电子车身稳定控制系统(esc,electronic stability controller),该系统在汽车于冰雪路面等低附着地面失稳之后激活,通过干预和调整汽车的动力输出,来实现稳定控制。
2、虽然车身稳定系统可以实现对汽车的车身稳定控制,但是车身稳定系统是在汽车已经失稳之后才会激活,并且在车身稳定系统激活之后,由于车身稳定系统为了尽快将车身稳定下来,可能会立即将汽车扭矩限制得很小,导致汽车产生很大的突兀感,使得用户体验不好。
技术实现思路
1、基于此,本技术提供了一种稳定控制方法、装置、设备及存储介质,可以减少汽车失稳的风险,降低车身稳定系统的触发概率,并且减少车身稳定系统激活之后产生的突兀感,从而大大提高用户体验。
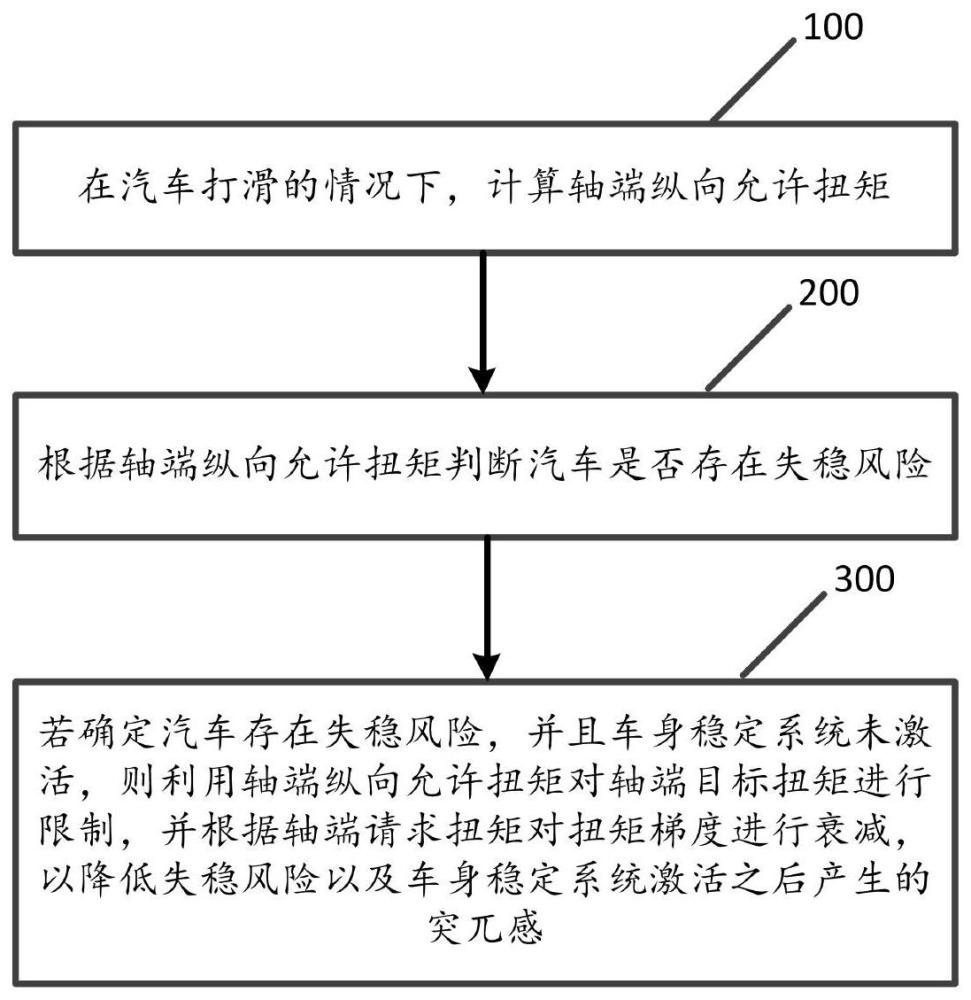
2、第一方面,本技术提供了一种稳定控制方法,该稳定控制方法包括:在汽车打滑的情况下,计算轴端纵向允许扭矩;根据轴端纵向允许扭矩判断汽车是否存在失稳风险;若确定汽车存在失稳风险,并且车身稳定系统未激活,则利用轴端纵向允许扭矩对轴端目标扭矩进行限制,并根据轴端请求扭矩对扭矩梯度进行衰减,以降低失稳风险以及车身稳定系统激活之后产生的突兀感。
3、结合第一方面,在第一方面的第一种可实施方式中,前述根据轴端请求扭矩对扭矩梯度进行衰减的步骤,包括:获取第一映射关系,其中,第一映射关系记载了不同的轴端请求扭矩和轴端纵向允许扭矩与衰减系数之间的映射关系,随着轴端请求扭矩的绝对值越大以及轴端纵向允许扭矩的绝对值越小,衰减系数越小,衰减的程度越大;基于轴端请求扭矩和轴端纵向允许扭矩,在第一映射关系中查找对应的衰减系数,并利用衰减系数对扭矩梯度进行衰减,以提升汽车的平稳度。
4、结合第一方面,在第一方面的第二种可实施方式中,在计算轴端纵向允许扭矩之后,方法还包括:计算车身稳定系统的控制扭矩与轴端纵向允许扭矩的差值;根据差值判断汽车当前是否充分利用附着力;若汽车当前未充分利用附着力,则利用差值对轴端纵向允许扭矩进行修正,以充分利用附着力,从而提高行车效率。
5、结合第一方面的第二种可实施方式,在第一方面的第三种可实施方式中,前述利用差值对轴端纵向允许扭矩进行修正的步骤,包括:获取第二映射关系,其中,第二映射关系记载了不同差值与调节比例的映射关系,调节比例小于一,并且随着差值的绝对值越大,调节比例越大;基于差值,在第二映射关系中查找对应的调节比例;利用调节比例与差值的乘积,对轴端纵向允许扭矩进行修正。
6、结合第一方面,在第一方面的第四种可实施方式中,在计算轴端纵向允许扭矩之后,稳定控制方法还包括:计算轴端纵向允许扭矩与轴端实际扭矩的差值;在汽车无打滑特征时,根据差值判断汽车当前是否充分利用附着力;若汽车当前未充分利用附着力,则根据差值对轴端纵向允许扭矩进行恢复,以充分利用附着力,从而提高行车效率。
7、结合第一方面的第四种可实施方式,在第一方面的第五种可实施方式中,前述根据差值对轴端纵向允许扭矩进行恢复的步骤,包括:获取第三映射关系,其中,第三映射关系记载了不同车速以及附着系数对应与恢复梯度的映射关系,随着车速越大及附着系数越小,恢复梯度越小;基于当前的车速以及附着系数,在第三映射关系中查找对应的恢复梯度;按照恢复梯度对轴端纵向允许扭矩进行恢复。
8、结合第一方面,在第一方面的第六种可实施方式中,在计算轴端纵向允许扭矩之后,稳定控制方法还包括:对打滑特征进行监测,并在监测到打滑特征时,触发打滑特征标志位;根据打滑特征标志位被触发的次数,对轴端允许扭矩进行修正。
9、第二方面,本技术还提供了一种稳定控制装置,该稳定控制装置包括:计算单元,用于在汽车打滑的情况下,计算轴端纵向允许扭矩;判断单元,用于根据轴端纵向允许扭矩判断汽车是否存在失稳风险;限制单元,用于若确定汽车存在失稳风险,并且车身稳定系统未激活,则利用轴端纵向允许扭矩对轴端目标扭矩进行限制,并根据轴端请求扭矩对扭矩梯度进行衰减,以降低失稳风险以及车身稳定系统激活之后产生的突兀感。
10、结合第二方面,在第二方面的第一种可实施方式中,限制单元具体用于:获取第一映射关系,其中,第一映射关系记载了不同的轴端请求扭矩和轴端纵向允许扭矩与衰减系数之间的映射关系,随着轴端请求扭矩的绝对值越大以及轴端纵向允许扭矩的绝对值越小,衰减系数越小,衰减的程度越大;基于轴端请求扭矩和轴端纵向允许扭矩,在第一映射关系中查找对应的衰减系数,并利用衰减系数对扭矩梯度进行衰减,以提升汽车的平稳度。
11、结合第二方面,在第二方面的第二种可实施方式中,稳定控制装置还包括修正单元,修正单元用于:计算车身稳定系统的控制扭矩与轴端纵向允许扭矩的差值;根据差值判断汽车当前是否充分利用附着力;若汽车当前未充分利用附着力,则利用差值对轴端纵向允许扭矩进行修正,以充分利用附着力,从而提高行车效率。
12、结合第二方面的第二种可实施方式,在第二方面的第三种可实施方式中,修正单元具体用于:获取第二映射关系,其中,第二映射关系记载了不同差值与调节比例的映射关系,调节比例小于一,并且随着差值的绝对值越大,调节比例越大;基于差值,在第二映射关系中查找对应的调节比例;利用调节比例与差值的乘积,对轴端纵向允许扭矩进行修正。
13、结合第二方面,在第二方面的第四种可实施方式中,稳定控制装置还包括恢复单元,恢复单元用于:计算轴端纵向允许扭矩与轴端实际扭矩的差值;在汽车无打滑特征时,根据差值判断汽车当前是否充分利用附着力;若汽车当前未充分利用附着力,则根据差值对轴端纵向允许扭矩进行恢复,以充分利用附着力,从而提高行车效率。
14、结合第二方面的第四种可实施方式,在第二方面的第五种可实施方式中,恢复单元具体用于:获取第三映射关系,其中,第三映射关系记载了不同车速以及附着系数对应与恢复梯度的映射关系,随着车速越大及附着系数越小,恢复梯度越小;基于当前的车速以及附着系数,在第三映射关系中查找对应的恢复梯度;按照恢复梯度对轴端纵向允许扭矩进行恢复。
15、结合第二方面,在第二方面的第六种可实施方式中,稳定控制装置还包括修正单元,修正单元用于:对打滑特征进行监测,并在监测到打滑特征时,触发打滑特征标志位;根据打滑特征标志位被触发的次数,对轴端允许扭矩进行修正。
16、第三方面,本技术还提供了一种稳定控制设备,该稳定控制设备包括处理器和存储器,处理器和存储器通过总线连接;处理器,用于执行多条指令;存储器,用于存储多条指令,指令适于由处理器加载并执行如第一方面或第一方面的任一项实施方式的稳定控制方法。
17、第四方面,本技术还提供了一种计算机可读存储介质,计算机可读存储介质中存储有多条指令,指令适于由处理器加载并执行如第一方面或第一方面的任一项实施方式的稳定控制方法。
18、综上,本技术提供了一种稳定控制方法、装置、设备及存储介质,其中,稳定控制设备在汽车打滑的情况下,根据轴端纵向允许扭矩判断汽车是否存在失稳的风险,并在存在失稳风险及esc未激活时,利用轴端纵向允许扭矩对轴端目标扭矩进行限制,并根据轴端请求扭矩对扭矩梯度进行衰减,使得轴端目标扭矩不会太大,并且扭矩变化不会太大,从而降低汽车失稳风险,减少触发车身稳定系统的概率,而且即使在汽车失稳并激活了车身稳定系统之后,也不会骤然从大扭矩降低至小扭矩,因此减少了车身稳定系统激活之后产生的突兀感,从而大大提高了用户体验。
本文地址:https://www.jishuxx.com/zhuanli/20240718/253897.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。