一种铁路货物列车无线电空制动系统及智能控制方法与流程
- 国知局
- 2024-08-02 17:05:05
本发明涉及铁路货物列车控制,尤其涉及一种铁路货物列车无线电空制动系统及智能控制方法。
背景技术:
1、铁路货物列车,又称铁路货运列车。铁路货物列车一般由负责牵引的机车和多个车辆编组组成。铁路货物列车普遍采用了以120型控制阀为控制核心的自动空气制动系统。这种机械控制空气制动系统因存在制动波,致使列车前后车辆制动动作时间存在差异,车辆之间纵向冲击作用较大,制动距离相对较长,在重载长大列车上问题表现更为突出。
2、目前,铁路货物列车成功应用的电空制动技术主要有缆接式ecp和locotrol两种。ecp电空制动技术采用了缆接式传输,通过有线传输控制信号和输送动力电源,由车辆电子控制装置控制控制阀向制动缸充风、排风或车辆制动控制仍采用以120型控制阀为核心的机械结构,通过在120阀加装控制装置,控制列车车辆制动时列车管同时排风,缓解时由加速缓解风缸向列车管同时充风的方式来实现制动同步。locotrol技术实际上是把长大编组列车分割成更小编组进行控制,由主控机车通过无线遥控技术对其它重联机车发送制动指令,实现多台机车的同步操纵,虽能一定程度地提高了长大列车的制动波速,降低了列车纵向力和缩短了制动距离,但小编组内仍然是原有机械控制空气制动方式,无法从根本上解决车辆制动不同步问题。
技术实现思路
1、本发明提供了一种铁路货物列车无线电空制动系统及智能控制方法,以解决现有铁路货物列车制动控制方式受制动波速影响,各车辆的制动同步性较差的问题。
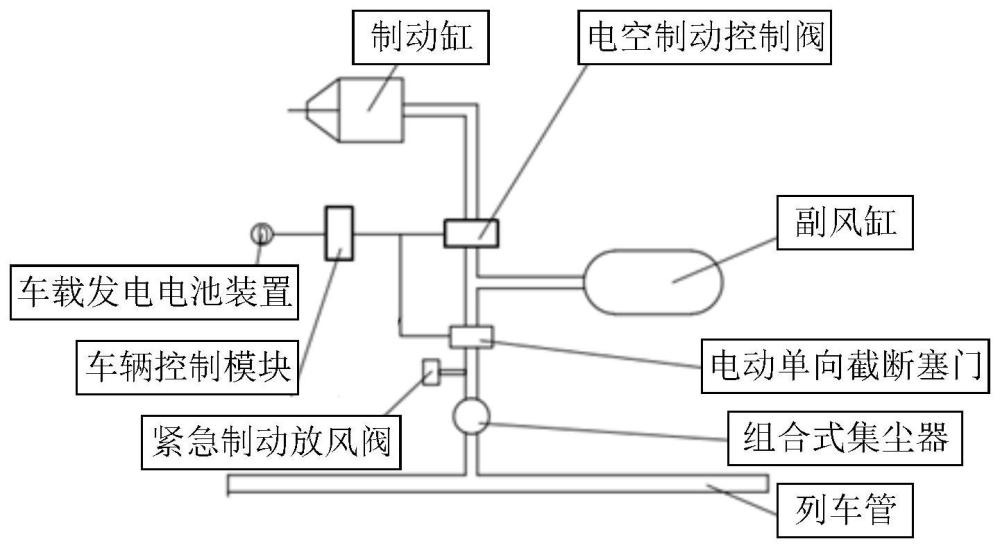
2、第一方面,本发明提供了一种铁路货物列车无线电空制动系统,所述铁路货物列车包括机车和电空制动车辆,所述机车设有制动信息采集装置和机车控制模块;所述电空制动车辆的电空制动系统包括:副风缸、电动单向截断塞门、列车管、制动缸、电空制动控制阀和车辆控制模块;所述副风缸通过电动单向截断塞门气连接列车管;所述副风缸还通过电空制动控制阀气连接制动缸;所述电空制动控制阀包括双通路电磁阀,其中,所述双通路电磁阀的第一通路连接副风缸与制动缸,第二通路连接制动缸与大气;所述车辆控制模块用于在接收到机车控制模块无线制动指令后,控制所述双通路电磁阀的第一通路开启、第二通路关闭,以使副风缸向制动缸充风;所述车辆控制模块还用于在接收到机车控制模块发出的无线缓解指令后,控制所述双通路电磁阀的第一通路关闭、第二通路开启,以使制动缸向大气排风。
3、在一种可能的实现方式中,所述电空制动控制阀包括两个双通路电磁阀,其中,第一双通路电磁阀的通路孔径大于第二双通路电磁阀的通路孔径;所述车辆控制模块用于在接收到机车控制模块发出的无线制动指令后,控制第一双通路电磁阀以使副风缸向制动缸充风,并在制动缸压力达到预设值、进入制动保持状态后,切换至第二双通路电磁阀,控制第二双通路电磁阀进行充风或排风以调整制动缸压力、使其保持在预设范围内。
4、在一种可能的实现方式中,所述铁路货物列车为电空制动车辆和机械控制空气制动车辆的混编列车;所述车辆控制模块还用于在接收到机车控制模块发出的无线缓解指令、使制动缸向大气排风时,控制关闭电动单向截断塞门,以避免列车管向副风缸充风,并在预设缓解时长之后,控制开启电动单向截断塞门,以使列车管向副风缸充风。
5、第二方面,本发明提供了一种铁路货物列车无线电空制动智能控制方法,应用于如上述任一项所述的铁路货物列车无线电空制动系统,所述控制方法包括:
6、机车制动信息采集装置实时监测机车列车管压力并将采集信息输入到机车控制模块;
7、机车控制模块将机车列车管压力转换为控制指令;
8、针对铁路货物列车中任一电空制动车辆,所述电空制动车辆的车辆控制模块获取机车控制模块发出的控制指令,其中,机车控制模块通过无线网络发出的所述控制指令包括制动指令和缓解指令;
9、若所述控制指令为制动指令,则车辆控制模块控制所述双通路电磁阀的第一通路开启、第二通路关闭,以使副风缸向制动缸充风,实现制动;
10、在制动过程中,若制动缸压力上升至目标值,则车辆控制模块控制所述双通路电磁阀的第一通路关闭、第二通路关闭,使副风缸停止向制动缸充风,进入制动保持状态;
11、若所述控制指令为缓解指令,则车辆控制模块控制所述双通路电磁阀的第一通路关闭、第二通路开启,以使制动缸向大气排风,实现缓解。
12、在一种可能的实现方式中,所述制动指令包括制动强度;其中,机车控制模块基于机车列车管压力降低量确定制动强度;
13、相应的,在所述电空制动车辆的车辆控制模块获取机车控制模块发出的控制指令之后,还包括:
14、若所述控制指令为制动指令,车辆控制模块基于所述制动指令中的制动强度,确定所述制动缸压力的目标值。
15、在一种可能的实现方式中,所述铁路货物列车为电空制动车辆和机械控制空气制动车辆的混编列车;所述机械控制空气制动车辆仍采用列车管压力变化控制。
16、在一种可能的实现方式中,所述机车控制模块基于机车列车管压力降低量确定制动强度包括:基于以下公式确定制动强度:
17、qp=(pl-(pl1+rmin))÷(rmax-rmin)×100%
18、其中,qp为制动强度,pl为制动前机车列车管的压力,pl1为开始制动操作后机车列车管的实时压力值,rmin为机车列车管降压最小减压有效值,rmax为机车列车管降压最大减压有效值;其中,当qp>100%时,取值100%。
19、在一种可能的实现方式中,车辆控制模块基于所述制动指令中的制动强度,确定所述制动缸压力的目标值包括:
20、基于列车静态时制动试验测得的枕簧位移值和车辆控制模块接收到的机车控制模块发出的制动强度,确定制动缸压力的目标值。
21、在一种可能的实现方式中,基于以下公式确定制动缸压力的目标值:
22、fz=pmin+(pmax-pmin)×qp×kkz
23、其中,fz为制动缸压力的目标值,pmin为车辆最小有效制动缸压力,pmax为车辆满载制动允许制动缸压力,qp为制动强度,kkz为空重车调整系数。
24、所述空重车调整系数基于以下公式确定:
25、kkz=l÷(l2-l1)
26、其中,l为列车静态时制动试验测得的车辆两个转向架各自枕簧位移平均值中的较小值,l1为空车时车辆枕簧位移值,l2为满载时车辆枕簧位移值。
27、在一种可能的实现方式中,所述制动指令为非紧急制动指令;在所述电空制动车辆的车辆控制模块获取机车控制模块发出的控制指令之后,还包括:
28、若所述控制指令为制动指令,且所述电空制动车辆位于爬坡位置,则不执行所述制动指令;
29、若所述控制指令为制动指令,且所述电空制动车辆已通过爬坡位置,则控制所述双通路电磁阀的第一通路开启、第二通路关闭,以使副风缸向制动缸充风,实现制动。
30、若所述控制指令为制动指令,且制动状态的电空制动车辆由非爬坡位置到达爬坡位置,则控制所述双通路电磁阀的第一通路关闭、第二通路开启,以使制动缸向大气排风,实现缓解。
31、在一种可能的实现方式中,所述铁路货物列车为电空制动车辆和机械控制空气制动车辆的混编列车;两种车辆制动均由各自车辆的列车管压力变化控制;所述电空制动车辆的列车管上设有紧急制动放风阀;所述控制方法,还包括:
32、所述电空制动车辆获取车辆的列车管压力;
33、若所述电空制动车辆的列车管压力降低至制动触发压力,则确定接收到制动指令;
34、若所述电空制动车辆的列车管压力的降低速率大于预设值,则确定所述制动指令为紧急制动指令;
35、若确定所述制动指令为紧急制动指令,则控制开启所述紧急制动放风阀,以使列车管向大气排风,控制所述双通路电磁阀的第一通路开启、第二通路关闭,以使副风缸向制动缸充风,直至制动缸压力上升至目标值。
36、在一种可能的实现方式中,在控制所述双通路电磁阀的第一通路关闭、第二通路开启,以使制动缸向大气排风之后,还包括:
37、若制动缸压力降低至零后,则控制所述双通路电磁阀的第一通路关闭、第二通路关闭,停止排风,完成缓解。
38、在一种可能的实现方式中,在所述电空制动车辆的车辆控制模块获取机车控制模块发出的控制指令之前,还包括:
39、当车辆控制模块监测到车辆在预设时间内持续超过预设速度或车辆超过最高允许速度时,则向机车控制模块发出车辆紧急制动请求;
40、或,当车辆控制模块监测到车辆列车管压力降低至预设值或降低速率超过预设速率,则向机车控制模块发出车辆紧急制动请求;其中,车辆速度大于零,且列车管风压小于副风缸风压;
41、当机车控制模块接收到请求车辆紧急制动的车辆数量达到预设数量时,则向车辆控制模块发出紧急制动指令,车辆控制模块控制车辆紧急制动;
42、当车辆控制模块监测到车辆列车管压力降低至预设值,且相邻车辆列车管压力降低至预设值,并监测到车辆正在移动,且在预设时间内未接收到制动指令时,车辆控制模块控制车辆紧急制动。
43、在一种可能的实现方式中,所述控制方法还包括:
44、在电空制动车辆解编驻车时,响应于操作人员的操作生成驻车控制指令,其中,所述驻车控制指令包括一键驻车制动指令或一键缓解指令;
45、响应于一键驻车制动指令,控制双通路电磁阀的第一通路开启、第二通路关闭,以使副风缸向制动缸充风,实现制动;
46、响应于一键缓解指令,控制所述双通路电磁阀的第一通路关闭、第二通路开启,以使制动缸向大气排风,实现缓解。
47、在一种可能的实现方式中,在所述电空制动车辆的车辆控制模块获取机车控制模块发出的控制指令之后,还包括:
48、在接收到制动指令之后预设时间内,若制动缸压力小于目标压力,且副风缸压力高于目标压力设定量,则判定电空制动控制阀开关故障;
49、或,在接收到缓解指令之后预设时间内,若制动压力高于大气压力设定量,则判定电空制动控制阀开关故障。
50、在一种可能的实现方式中,在所述电空制动车辆的车辆控制模块获取机车控制模块发出的控制指令之前,还包括:
51、在非制动状态下,若制动缸压力高于大气压力且达到预设值,则判定电空制动控制阀泄漏故障。
52、在一种可能的实现方式中,在所述进入制动保持状态之后,还包括:
53、在制动保持状态下,若制动缸压力不能保持在目标区间内,则判定制动缸泄漏或控制阀至制动缸间支管泄漏。
54、在一种可能的实现方式中,在所述电空制动车辆的车辆控制模块获取机车控制模块发出的控制指令之前,还包括:
55、在非制动状态下,若列车管与副风缸的压力差大于预设值,且副风缸压力在设定时间内持续降低,则判定电动单向截断塞门逆向关闭故障或副风缸泄漏。
56、有益效果:
57、本发明提供一种铁路货物列车无线电空制动系统及智能控制方法。本发明通过在车辆上设置电空制动控制阀,车辆可基于机车电信号指令控制双通路电磁阀的第一通路、第二通路的开闭,实现制动和制动缓解。相对于现有技术中通过120控制阀基于列车管压力差变化实现制动控制,本发明实施例基于机车电信号控制电空制动控制阀,各车辆可同步接收到机车电信号,并同步制动和缓解,消除了制动波,实现了制动同步。
58、本发明提供的一种铁路货物列车无线电空制动车辆和120控制阀机械控制空气制动车辆混编的列车制动控制方法,方便120控制阀制动控制车辆向无线电空制动车辆的改造过渡。
本文地址:https://www.jishuxx.com/zhuanli/20240718/253983.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表