车辆控制方法、装置、计算机设备和存储介质与流程
- 国知局
- 2024-08-02 17:06:55
本申请涉及自动驾驶,特别是涉及一种车辆控制方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、汽车的智能化是目前车辆行业的发展潮流,随着现代控制理论及人工智能等技术的发展,汽车的智能控制方法也日渐成熟。智能网联技术是汽车产业和人工智能、高性能计算、大数据、5g、物联网、云计算等信息技术以及城市管理等领域深度融合的产物 。
2、车辆巡航技术可有效提高驾驶体验,减轻驾驶疲劳,提高行驶安全性。相关的车辆巡航方法为定速巡航,人为设置目标车速,并根据目标车速对车辆的车速进行控制。
3、然而,在车辆的实际行驶过程中,由于驾驶工况(如上坡、下坡等)以及实时道路车况的变化,需要对车速进行实时调控,实现稳定的车速调控。而相关的车辆巡航方法对车速的控制无法对车速进行实时的调控,因此,相关的车辆控制方法的控制稳定性差,控制效果差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提升控制效果的车辆控制方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供了一种车辆控制方法,包括:
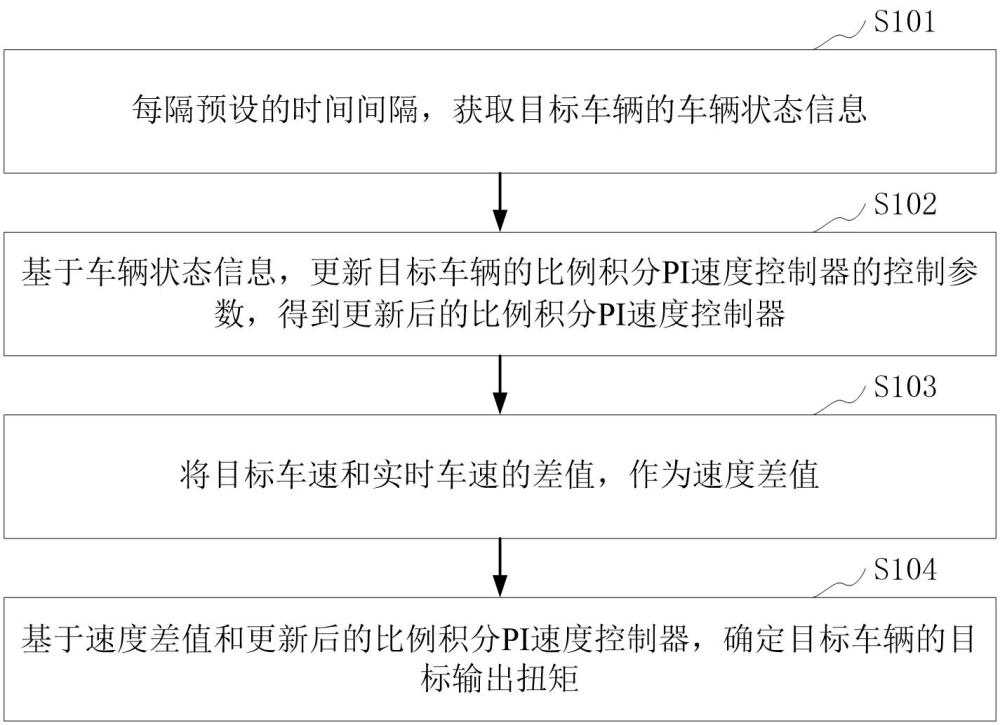
3、每隔预设的时间间隔,获取目标车辆的车辆状态信息;所述车辆状态信息包括目标车速、实时车速、车辆进入控速模式时刻的控速扭矩和控速车速、以及档位信息;
4、基于所述车辆状态信息,更新所述目标车辆的比例积分pi速度控制器的控制参数,得到更新后的比例积分pi速度控制器;
5、将所述目标车速和所述实时车速的差值,作为速度差值;
6、基于所述速度差值和所述更新后的比例积分pi速度控制器,确定所述目标车辆的目标输出扭矩。
7、在其中一个实施例中,所述基于所述车辆状态信息,更新所述目标车辆的比例积分pi速度控制器的控制参数,得到更新后的比例积分pi速度控制器,包括:
8、基于所述实时车速、以及所述档位信息,计算所述目标车辆的指定扭矩;
9、基于所述目标车速、所述指定扭矩、所述控速扭矩和所述控速车速,计算所述目标车辆的比例积分pi速度控制器的更新后的控制参数;
10、基于所述更新后的控制参数,更新所述目标车辆的比例积分pi速度控制器的控制参数,得到更新后的比例积分pi速度控制器。
11、在其中一个实施例中,所述指定扭矩为达到稳态时的目标扭矩,所述基于所述实时车速、以及所述档位信息,计算所述目标车辆的指定扭矩,包括:
12、基于所述实时车速、所述档位信息、当前道路的坡度信息、所述目标车辆的当前扭矩和汽车纵向动力学方程,计算所述目标车辆的当前质量;
13、基于所述目标车速、所述档位信息、所述当前道路的坡度信息、所述当前质量和所述汽车纵向动力学方程,计算所述目标车辆达到稳态时的目标扭矩。
14、在其中一个实施例中,所述控制参数包括比例系数和积分系数,所述基于所述目标车速、所述指定扭矩、所述控速扭矩和所述控速车速,计算所述目标车辆的比例积分pi速度控制器的更新后的控制参数,包括:
15、将所述控速扭矩与所述目标扭矩的差,作为第一扭矩差;
16、将所述目标车速与所述控速车速的差,作为第一速度差;
17、计算所述第一扭矩差与所述第一速度差的比值,得到所述目标车辆的比例积分pi速度控制器的更新后的比例系数;
18、计算所述更新后的比例系数与预设的积分倍率的乘积,得到所述目标车辆的比例积分pi速度控制器的更新后的积分系数。
19、在其中一个实施例中,所述指定扭矩为电机的最大输出扭矩,所述基于所述实时车速、以及所述档位信息,计算所述目标车辆的指定扭矩,包括:
20、基于所述实时车速、所述档位信息和所述目标车辆的电机的外特性曲线,计算所述目标车辆的电机的最大输出扭矩。
21、在其中一个实施例中,所述控制参数包括比例系数和积分系数,所述基于所述目标车速、所述指定扭矩、所述控速扭矩和所述控速车速,计算所述目标车辆的比例积分pi速度控制器的更新后的控制参数,包括:
22、将所述电机的最大输出扭矩与所述控速扭矩的差,作为第二扭矩差;
23、将所述控速车速与所述目标车速的差,作为第二速度差;
24、计算所述第二扭矩差与两倍的所述第二速度差的比值,得到所述目标车辆的比例积分pi速度控制器的更新后的比例系数;
25、将所述更新后的比例系数与预设的积分倍率的乘积,作为所述目标车辆的比例积分pi速度控制器的更新后的积分系数。
26、第二方面,本申请还提供了一种车辆控制装置,包括:
27、信息获取模块,用于每隔预设的时间间隔,获取目标车辆的车辆状态信息;所述车辆状态信息包括目标车速、实时车速、车辆进入控速模式时刻的控速扭矩和控速车速、以及档位信息;
28、参数更新模块,用于基于所述车辆状态信息,更新所述目标车辆的比例积分pi速度控制器的控制参数,得到更新后的比例积分pi速度控制器;
29、计算模块,用于将所述目标车速和所述实时车速的差值,作为速度差值;
30、确定模块,用于基于所述速度差值和所述更新后的比例积分pi速度控制器,确定所述目标车辆的目标输出扭矩。
31、第三方面,本申请还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的步骤。
32、第四方面,本申请还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的步骤。
33、第五方面,本申请还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面所述的步骤。
34、上述车辆控制方法、装置、计算机设备、存储介质和计算机程序产品,每隔预设的时间间隔,获取目标车辆的车辆状态信息;所述车辆状态信息包括目标车速、实时车速、车辆进入控速模式时刻的控速扭矩和控速车速、以及档位信息;基于所述车辆状态信息,更新所述目标车辆的比例积分pi速度控制器的控制参数,得到更新后的比例积分pi速度控制器;将所述目标车速和所述实时车速的差值,作为速度差值;基于所述速度差值和所述更新后的比例积分pi速度控制器,确定所述目标车辆的目标输出扭矩。这样,采用控制参数根据实时获取车辆状态信息进行实时更新的比例积分pi速度控制器,根据实时获取车辆状态信息,实时确定目标车辆的目标输出扭矩,对车辆车速进行实时自适应调控,能够提高车辆控制的稳定性,提升控制效果。
技术特征:1.一种车辆控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述车辆状态信息,更新所述目标车辆的比例积分pi速度控制器的控制参数,得到更新后的比例积分pi速度控制器,包括:
3.根据权利要求2所述的方法,其特征在于,所述指定扭矩为达到稳态时的目标扭矩,所述基于所述实时车速、以及所述档位信息,计算所述目标车辆的指定扭矩,包括:
4.根据权利要求3所述的方法,其特征在于,所述控制参数包括比例系数和积分系数,所述基于所述目标车速、所述指定扭矩、所述控速扭矩和所述控速车速,计算所述目标车辆的比例积分pi速度控制器的更新后的控制参数,包括:
5.根据权利要求2所述的方法,其特征在于,所述指定扭矩为电机的最大输出扭矩,所述基于所述实时车速、以及所述档位信息,计算所述目标车辆的指定扭矩,包括:
6.根据权利要求5所述的方法,其特征在于,所述控制参数包括比例系数和积分系数,所述基于所述目标车速、所述指定扭矩、所述控速扭矩和所述控速车速,计算所述目标车辆的比例积分pi速度控制器的更新后的控制参数,包括:
7.一种车辆控制装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结本申请涉及一种车辆控制方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:每隔预设的时间间隔,获取目标车辆的车辆状态信息;所述车辆状态信息包括目标车速、实时车速、车辆进入控速模式时刻的控速扭矩和控速车速、以及档位信息;基于所述车辆状态信息,更新所述目标车辆的比例积分PI速度控制器的控制参数,得到更新后的比例积分PI速度控制器;将所述目标车速和所述实时车速的差值,作为速度差值;基于所述速度差值和所述更新后的比例积分PI速度控制器,确定所述目标车辆的目标输出扭矩。采用本方法能够提高车辆控制的稳定性,提升车辆控制效果。技术研发人员:谢海明,王师佳受保护的技术使用者:北京峰智睿联科技有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240718/254214.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。