接线盒的全自动上料线的制作方法
- 国知局
- 2024-08-05 13:14:08
本技术涉及光伏组件的自动化生产领域,具体涉及一种接线盒的全自动上料线。
背景技术:
1、在光伏组件的生产工艺中,在将焊接在光伏组件板上的汇流条挑起后,需要将接线盒对准汇流条进行插接安装,以便于将汇流条焊接在接线盒上实现电流的连通和输出。
2、目前,光伏组件的接线盒主要分为两种,一种为本体带连接线的产品,另一种为本体不带连接线的产品。其中带线接线盒用于安装在光伏组件板的两侧形成输出端,不带线接线盒用于安装在光伏组件板的中部以形成电流的通路。上述接线盒在安装前均需要确保其正反面位置的准确性,以便当机械手或其他抓取组件在搬运接线盒时保证位置的准确性。
3、现有技术存在以下不足:
4、一、对于带线接线盒的供料通常采用的方法是将放置好有序排列的带线接线盒的料架向供料机构供料;这种方式需要通过人工事先对无序的带线接线盒先进行有序化的摆放上料,使放置在料架上的带线接线盒的正反方向一致,因此整体工艺流程较为繁琐。
5、二、对于不带线接线盒的供料通常无法控制其正反方向,只能实现常规的无序自动上料。
6、因此,如何解决上述现有技术存在的不足,便成为本实用新型所要研究解决的课题。
技术实现思路
1、本实用新型的目的是提供一种接线盒的全自动上料线。
2、为达到上述目的,本实用新型采用的技术方案是:
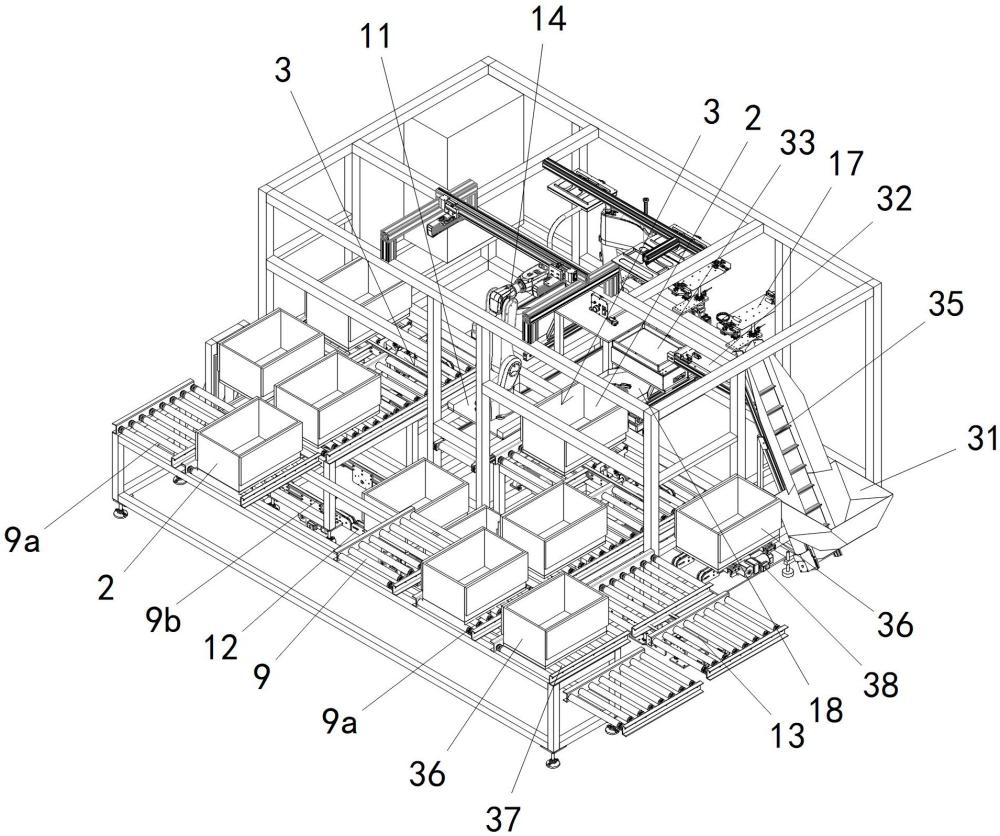
3、一种接线盒的全自动上料线,包括带线接线盒的供料单元以及不带线接线盒的供料单元;
4、所述带线接线盒的供料单元包括供料装置、摆正装置以及视觉检测装置;
5、所述供料装置包括至少一组第一水平输送线,该第一水平输送线经驱动将带线接线盒的第一供料箱移动至一供料工位处;
6、所述摆正装置用于将带线接线盒从供料箱内取出并通过悬挂的方式对带线接线盒进行悬挂;
7、所述视觉检测装置包括用于对悬挂的带线接线盒正反面进行识别的第一检测相机,该第一检测相机对应所述检测工位处设置;
8、其中,所述摆正装置还包括用于调整带线接线盒朝向的调节结构,该调节结构用于将悬挂的带线接线盒以正向朝上的姿态放置在放置平台上;
9、所述不带线接线盒的供料单元包括上料装置以及用于将不带线接线盒从上料装置中移载至下料工位的搬运装置;
10、所述上料装置包括储料盒、上料输送线以及振动盘;还包括用于供应不带线接线盒的第二供料箱以及用于输送第二供料箱的第二水平输送线;所述第二供料箱对应所述储料盒的入料处设置;
11、所述上料输送线的进料端对应所述储料盒的出料处设置,上料输送线的出料端对应所述振动盘设置;所述振动盘经驱动按一设定频率和振幅振动,用于对盘中的不带线接线盒进行振动翻面;
12、所述振动盘的上方设有用于拍摄盘中不带线接线盒朝向的第二检测相机;
13、所述搬运装置抓取经第二检测相机确认的需求面朝上的不带线接线盒,并移载至所述下料工位处。
14、进一步的技术方案,所述供料装置还包括平行于第一水平输送线且位于第一水平输送线上方的用于将满载的所述第一供料箱放置于第一水平输送线上以及将空载的第一供料箱从第一水平输送线上取下的空轨输送线。
15、进一步的技术方案,所述供料工位设有两处,分列于所述摆正装置的左右两侧;所述第一水平输送线设有两组,与所述供料工位一一对应设置。
16、进一步的技术方案,所述第一水平输送线包括上下两层,上层输送线作为供料线对应所述供料工位设置,下层输送线作为回收排料或/和空箱的回收线;
17、当下层输送线作为回收排料的回收线时,该下层输送线对应一排料输送线的出料端的下方设置;
18、当下层输送线作为回收空箱的回收线时,两层输送线之间通过一升降平台衔接。
19、进一步的技术方案,所述上层输送线包括平行设置的多段,相邻段之间设有升降输送皮带;当升降输送皮带上升至高于上层输送线的承载平面时,第一供料箱经由升降输送皮带的驱动从上层输送线的当前段移动至相邻的另一段。
20、进一步的技术方案,还包括双夹爪组件以及驱动其移动的驱动机构;所述双夹爪组件经所述驱动机构驱动,依次移动至所述供料工位处取料、移动至检测工位处检测抓取的带线接线盒的朝向、移动至下料工位处下料;其中,所述双夹爪组件包括两对夹爪,分别为用于紧固或夹紧带线接线盒的第一对夹爪以及用于悬挂带线接线盒的第二对夹爪;两对夹爪的驱动部分相对固定设置,且两对夹爪相互贴合或靠近设置;所述第一对夹爪的两夹爪呈两竖直设置的杆状,所述第二对夹爪的两夹爪呈两相对设置的弯钩状;所述第一对夹爪的两夹爪呈两竖直设置的杆状,所述第二对夹爪的两夹爪呈两相对设置的弯钩状;
21、所述双夹爪组件中,第一对夹爪的两杆状夹爪的相对侧面作为从所述第一供料箱中夹紧所述带线接线盒的定位面,通过作用第一对夹爪实现对带线接线盒的一环状线材的夹紧定位,进而实现对带线接线盒的拾取;
22、所述双夹爪组件中,第二对夹爪的两弯钩状夹爪经驱动具有打开和闭合两个状态;在所述打开状态下,第二对夹爪让位并接纳被第一对夹爪拾取的带线接线盒的环状线材;在所述闭合状态下,第二对夹爪穿过所述带线接线盒的环状线材,此时第一对夹爪可解除对带线接线盒的夹紧,带线接线盒通过其环状线材悬挂在第二对夹爪上实现被第二对夹爪的抓取。
23、进一步的技术方案,所述驱动机构为机械臂;或者,所述驱动机构为包含z轴移动的两轴或三轴直线驱动机构。
24、当所述驱动机构为机械臂时,所述调节结构为机械臂。
25、当所述驱动机构为包含z轴移动的两轴或三轴直线驱动机构时;所述调节结构为驱动气缸,该驱动气缸固定在所述驱动机构上,且驱动气缸的活塞杆抵靠作用于所述双夹爪组件的一侧,通过直线顶伸驱动所述双夹爪组件偏移z轴;或者,所述调节结构为旋转气缸,该旋转气缸固定在所述驱动机构上,且旋转气缸的转动部固定于所述双夹爪组件的一侧,通过旋转驱动所述双夹爪组件偏移z轴。
26、进一步的技术方案,所述带线接线盒的供料单元还包括用于承接所述双夹爪组件下料的下料输送线,该下料输送线的上料端对应双夹爪组件设置,下料输送线的下料端对应所述下料工位设置;
27、所述视觉检测装置还包括第三检测相机,该第三检测相机对应所述下料输送线的上方设置;
28、所述带线接线盒的供料单元还包括用于排出经检测不合格的带线接线盒的排料输送线,该排料输送线对应所述下料输送线的侧部设置。
29、进一步的技术方案,所述视觉检测装置还包括第四检测相机,该第四检测相机对应所述供料工位处的第一供料箱的上方设置,用于检测第一供料箱中带线接线盒的位置。
30、进一步的技术方案,所述不带线接线盒的供料单元还包括挖料输送线,该挖料输送线的挖料端伸入所述储料盒中,挖料输送线的出料端对应所述上料输送线的进料端设置。
31、进一步的技术方案,所述上料装置还包括平行于第二水平输送线上方的用于将满载的第二供料箱放置于第二水平输送线上以及将空载的第二供料箱从第二水平输送线上取下的空轨输送线。
32、进一步的技术方案,所述第二水平输送线包括平行设置的多段,相邻段之间设有升降输送皮带;当升降输送皮带上升至高于第二水平输送线的承载平面时,第二供料箱经由升降输送皮带的驱动从第二水平输送线的当前段移动至相邻的另一段。
33、进一步的技术方案,还包括一抬升翻转机构,该抬升翻转机构贴近所述储料盒设置;所述抬升翻转机构包括翻转盘,该翻转盘上承载有所述第二供料箱,还包括翻转驱动机构,该翻转驱动机构驱动所述翻转盘带着所述第二供料箱朝向所述储料盒处翻转,用以将第二供料箱中的不带线接线盒倒入储料盒中。
34、进一步的技术方案,所述搬运装置为机械手。
35、本实用新型的工作原理及优点如下:
36、1、本实用新型可实现对带线接线盒的无序夹取,对无序摆放的带线接线盒进行夹取并归正,省略了人工排序的步骤,可在夹取带线接线盒后通过视觉识别当前夹取的位置状态,并以根据识别结果将带线接线盒归正放置在相应的下料位置。
37、2、本实用新型还可实现对不带线接线盒的无序上料,通过设置振动盘对不带线接线盒进行振动翻面,翻面以后经过视觉扫描识别正反面接线盒物料,可通过机械手抓取完所有正面朝上的不带线接线盒后再次振动,此间不断向振动盘供料,以维持装置作业的连续性。相较于传统方式,简化了翻面机构的设置且无需将倒置的不带线接线盒传送流出,节约了工艺流程且连续性好。
38、3、本实用新型还可采用空轨运输方式将载有无序的有线或不带线接线盒的供料箱运输至指定供料位置,并由相关执行机构动作将无序的带线或不带线接线盒转化为有序的带线或不带线接线盒,以最终向安装工位供应物料。
本文地址:https://www.jishuxx.com/zhuanli/20240720/266460.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表