一种焊接工作站的搬运机器人运动系统的制作方法
- 国知局
- 2024-08-05 13:19:04
本技术涉及运动系统,尤其是一种焊接工作站的搬运机器人运动系统。
背景技术:
1、大功率变压器等工业产品的结构件种类多,形状各异,难于实现自动化焊接,目前主要依靠手工焊接或大量模架固定后再进行机器人焊接。人工焊接对工人的经验要求比较高,质量不稳定;机器人焊接大部分属于刚性焊接,只能实现部分自动化。特别在精密焊接中良品率低、耗时长,无法满足结构件的大批量生产要求,而且现场粉尘、高温的环境也会对工人健康带来威胁。将多种类结构件拼装焊接通过焊接工作站产业化具有焊接质量稳定、焊接强度好、劳动生产率高、可改善工人劳动条件等特点。如图5所示,其技术方案为:首先利用搬运机器人将经检测完好的槽钢件放置到变位机器人上,并采用相机进行定位;然后搬运机器人夹取经检测完好的待焊零件到达与槽钢件焊接位置配合处,再利用相机标定获取多机器人和相机之间的相对位置关系,引导焊接机器人进行拼装焊接。
2、而搬运机器人在运动过程中缺少对入库和出库的感应,市场上一些机器人自动入库技术采用zigbee组网比较多,但zigbee功耗相对较高、在外面容易受到外界天气干扰导致组网信号差,存在一些缺陷,且在运动系统的设置中,对于路径的研判和选择,遇到突发情况的处理还有待提高。
技术实现思路
1、为了克服现有的不足,本实用新型提供了一种焊接工作站的搬运机器人运动系统。
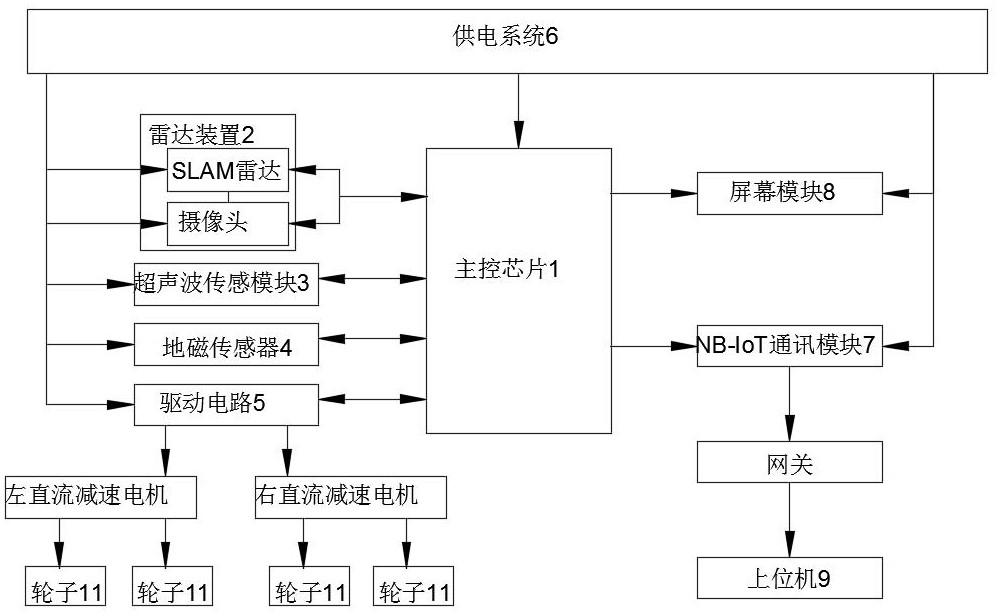
2、本实用新型解决其技术问题所采用的技术方案是:一种焊接工作站的搬运机器人运动系统,包括主控芯片、雷达装置、超声波传感模块、地磁传感器、驱动电路、供电系统、nb-iot通讯模块和屏幕模块;所述主控芯片传输信号给屏幕模块,与雷达装置、超声波传感模块、地磁传感器、驱动电路和nb-iot通讯模块双向联通;所述nb-iot通讯模块通过网关与上位机双向联通;所述雷达装置设置在搬运机器人前侧;所述超声波传感模块和地磁传感器设置在搬运机器人库中;所述驱动电路驱动搬运机器人底部的轮子;所述供电系统给主控芯片、雷达装置、超声波传感模块、地磁传感器、驱动电路、nb-iot通讯模块和屏幕模块供电。
3、根据本实用新型的另一个实施例,进一步包括,所述主控芯片为stm32f103c8t6;所述屏幕模块选用hdmi显示器;所述地磁传感器为hmc5983。
4、根据本实用新型的另一个实施例,进一步包括,所述雷达装置包括用于建立地图模型、结合里程计进行导航及自主规划路线的slam激光雷达和用于扫描障碍的摄像头;所述slam激光雷达和摄像头采集信息传输至主控芯片。
5、根据本实用新型的另一个实施例,进一步包括,所述超声波传感模块选用hc-sr04超声波模块,包括超声波发射驱动电路、超声波传感器、信号放大电路和信号比较电路;所述主控芯片产生pwm方波给超声波发射驱动电路;所述超声波发射驱动电路将pwm方波传输给超声波传感器;所述超声波传感器将障碍物信息通过信号放大电路传输给信号比较电路;所述信号比较电路将方波信号传回主控芯片。
6、根据本实用新型的另一个实施例,进一步包括,所述驱动电路采用集成芯片l298n,分别连接左直流减速电机和右直流减速电机;所述左直流减速电机驱动驱动左侧两组轮子;所述右直流减速电机驱动右侧两组轮子。
7、根据本实用新型的另一个实施例,进一步包括,所述供电系统电源采用三节3.7v可充电的锂电池,直接驱动驱动电路并通过降压/稳压电路后连接主控芯片、nb-iot通讯模块、雷达装置、超声波传感模块、地磁传感器和屏幕模块。
8、本实用新型的有益效果:1、slam激光雷达实时扫描、更新搬运路径环境情况,控制芯片控制轮子灵活移动,再结合网络摄像头,准确规避障碍物,提高了路径选择和研判的能力,也提升了搬运效率,提升焊接工作站整体工作效率;
9、基于nb-iot技术的远距离无线地磁传感器,有效地避免了搬运机器人入库误判的可能性,能精准实现对搬运机器人入库、出库的统计功能;
10、上传信息至上位机,能够有效远程控制,并对数据进行记录存储;
11、4、通过基于物联网,提升搬运机器人工作效率,甚至可以多组机器人同事工作,能够适应不同使用场合,投资回报率高。
技术特征:1.一种焊接工作站的搬运机器人运动系统,其特征是,包括主控芯片(1)、雷达装置(2)、超声波传感模块(3)、地磁传感器(4)、驱动电路(5)、供电系统(6)、nb-iot通讯模块(7)和屏幕模块(8);所述主控芯片(1)传输信号给屏幕模块(8),与雷达装置(2)、超声波传感模块(3)、地磁传感器(4)、驱动电路(5)和nb-iot通讯模块(7)双向联通;所述nb-iot通讯模块(7)通过网关与上位机(9)双向联通;所述雷达装置(2)设置在搬运机器人(10)前侧;所述超声波传感模块(3)和地磁传感器(4)设置在搬运机器人库(12)中;所述驱动电路(5)驱动搬运机器人底部的轮子(11);所述供电系统(6)给主控芯片(1)、雷达装置(2)、超声波传感模块(3)、地磁传感器(4)、驱动电路(5)、nb-iot通讯模块(7)和屏幕模块(8)供电。
2.根据权利要求1所述的焊接工作站的搬运机器人运动系统,其特征是,所述主控芯片(1)为stm32f103c8t6;所述屏幕模块(8)选用hdmi显示器;所述地磁传感器(4)为hmc5983。
3.根据权利要求1所述的焊接工作站的搬运机器人运动系统,其特征是,所述雷达装置(2)包括用于建立地图模型、结合里程计进行导航及自主规划路线的slam激光雷达和用于扫描障碍的摄像头;所述slam激光雷达和摄像头采集信息传输至主控芯片(1)。
4.根据权利要求1所述的焊接工作站的搬运机器人运动系统,其特征是,所述超声波传感模块(3)选用hc-sr04超声波模块,包括超声波发射驱动电路、超声波传感器、信号放大电路和信号比较电路;所述主控芯片(1)产生pwm方波给超声波发射驱动电路;所述超声波发射驱动电路将pwm方波传输给超声波传感器;所述超声波传感器将障碍物信息通过信号放大电路传输给信号比较电路;所述信号比较电路将方波信号传回主控芯片(1)。
5.根据权利要求1所述的焊接工作站的搬运机器人运动系统,其特征是,所述驱动电路(5)采用集成芯片l298n,分别连接左直流减速电机和右直流减速电机;所述左直流减速电机驱动左侧两组轮子(11);所述右直流减速电机驱动右侧两组轮子(11)。
6.根据权利要求1所述的焊接工作站的搬运机器人运动系统,其特征是,所述供电系统(6)电源采用三节3.7v可充电的锂电池,直接驱动驱动电路(5)并通过降压/稳压电路后连接主控芯片(1)、nb-iot通讯模块(7)、雷达装置(2)、超声波传感模块(3)、地磁传感器(4)和屏幕模块(8)。
技术总结本技术涉及运动系统技术领域,尤其是一种焊接工作站的搬运机器人运动系统,包括主控芯片、雷达装置、超声波传感模块、地磁传感器、驱动电路、供电系统、NB‑IoT通讯模块和屏幕模块;所述主控芯片传输信号给屏幕模块,与雷达装置、超声波传感模块、地磁传感器、驱动电路和NB‑IoT通讯模块双向联通;所述NB‑IoT通讯模块通过网关与上位机双向联通;所述雷达装置设置在搬运机器人前侧;所述超声波传感模块和地磁传感器设置在搬运机器人库中;所述驱动电路驱动搬运机器人底部的轮子。本设计基于NB‑IoT通讯模块,能够提高路径选择和研判的能力和搬运效率效率,从而提升焊接工作站整体工作效率。技术研发人员:杨金雷受保护的技术使用者:江苏鑫洋盛自动化科技有限公司技术研发日:20231030技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240720/266852.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表