面向微小航天器抵近探测任务的相对运动自适应控制方法与流程
- 国知局
- 2024-08-01 05:25:21
本发明涉及空间在轨服务领域,尤其涉及面向微小航天器抵近探测任务过程中的相对运动控制方法。
背景技术:
1、空间资源日益紧张的形势下,在轨服务是解决航天器在轨运行过程中出现的各类故障和意外情况、航天器失效零部件更换以及燃料加注等问题的必备手段。然而在轨服务具有系统复杂、要素繁多、高度敏感等特点,再加上太空环境的特殊性,使得其在工程实践中开展面临重重阻力。对空间目标进行抵近观测,可弥补地面观测成像信息的不足,是获取目标在轨特征与状态信息的重要手段,同样也是开展精细化在轨服务的必要前置阶段。
2、抵近观测是指一个航天器在另一个航天器的近距离范围内形成比便于观测的相对运动轨迹,实现对该航天器的特征与状态有目的的、持续有序的观测与监视,从而了解和掌握该航天器的外部形状、运动状态、机动意图以及故障现象等信息,可为空间在轨服务提供信息支持与保障。
技术实现思路
1、本发明解决的技术问题是:针对微小航天器抵近探测过程对控制系统的高精度、强鲁棒需求,基于简单自适应控制控制架构,提出了一种新颖的标称轨迹规划与相对轨道控制联合设计策略,设计了一种具有高精度、强鲁棒性特点的自适应控制器。
2、本发明的技术方案是:
3、一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,包括以下步骤:
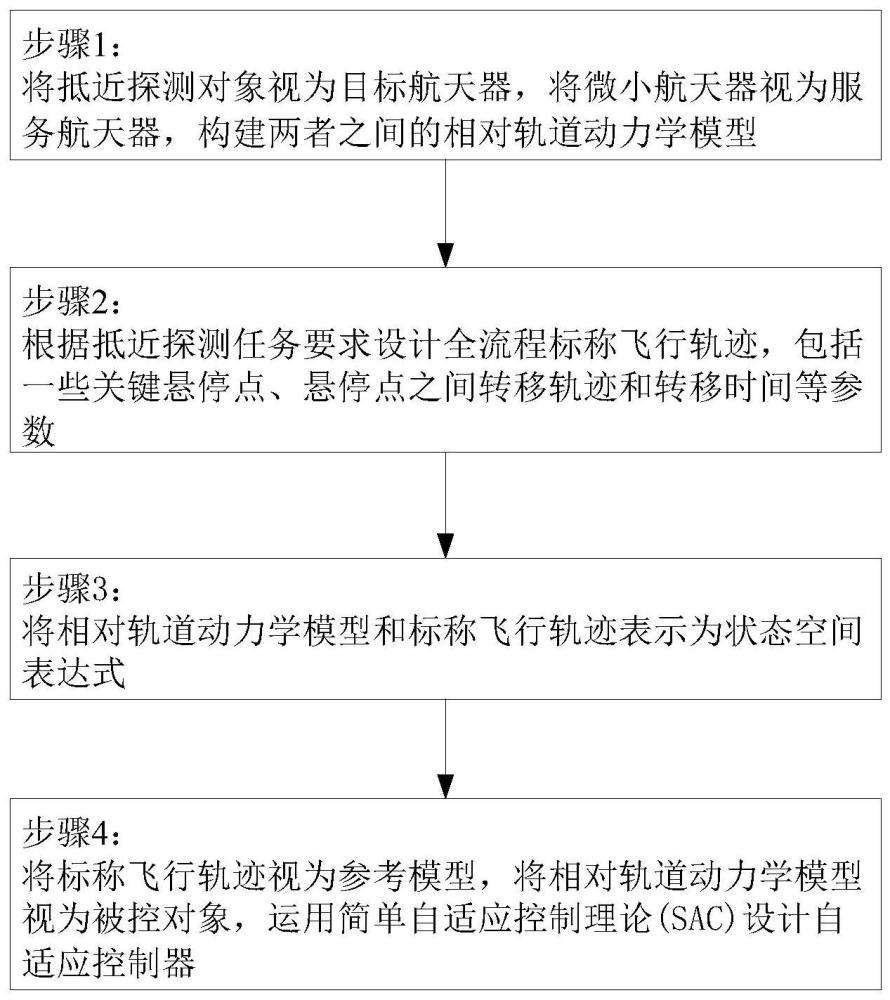
4、步骤1,将抵近探测对象视为目标航天器,将微小航天器视为服务航天器,构建两者之间的相对轨道动力学模型;
5、步骤2,根据抵近探测任务要求设计全流程标称飞行轨迹,包括一些关键悬停点、悬停点之间转移轨迹和转移时间的参数;
6、步骤3,将相对轨道动力学模型和标称飞行轨迹分别采用状态空间进行表示;
7、步骤4,将标称飞行轨迹视为参考模型,将相对轨道动力学模型视为被控对象,运用自适应控制理论sac设计相对运动自适应控制器。
8、进一步的是,所述步骤1中,具体过程包括:
9、将基于代数法推导的相对动力学方程通过惯性坐标系中轨道动力学做差,并表示在目标航天器lvlh轨道系中便获得相对动力学方程的非线性形式:
10、
11、式中:下标t和s分别代表目标航天器和服务航天器,θ表示目标航天器的的真近点角,μ为地球引力常数,
12、忽略目标航天器和服务航天器之间的摄动差,同时在近圆轨道假设下,并通过对重力场的一阶近似得到下述相对运动方程,即cw方程:
13、
14、式中:n为目标航天器的平均角速度。
15、进一步的是,所述步骤2中,根据抵近探测任务要求设计全流程标称飞行轨迹包括:标称飞行轨迹的设计考虑到技术特性、任务要求以及安全性限制的众多约束因素,设计为直线平移和椭圆绕飞两种形式,同时为使得分段轨迹之间平滑过渡,在关键点引入悬停模式。
16、进一步的是,所述步骤2中,对于始末位置固定的直线平移轨迹设计采用多项式插值原理,将标称轨迹的数学描述表示为相对位置l、相对速度与时间相关的多项式函数:
17、
18、式中,an、an-1、...、a1以及a0表示n次多项式的插值系数,
19、对于n次多项式的插值系数的确定,需要至少n+1个方程,在边界信息l(t0)=l0和l(tf)=lf之外,引入相对位置l的各阶导数构造剩余n-1个边界条件以使得多项式的插值系数唯一确定。
20、进一步的是,所述步骤2中,所述引入相对位置l的各阶导数构造剩余n-1个边界条件包括
21、进一步的是,椭圆绕飞轨迹设计与所述直线平移轨迹设计方法基本相同,区别在于椭圆绕飞轨迹设计中将绕飞角度θ及其各阶导数作为插值变量,插值多项式系数确定过程与直线平移相同。
22、进一步的是,所述步骤3中,将相对轨道动力学模型和标称飞行轨迹表示为状态空间表达式包括:
23、相对轨道动力学模型表示为相对位置δr和相对速度δv的状态空间表示达式:
24、
25、将标称飞行轨迹表示为相对运动矢量x和的状态空间表达式:
26、
27、进一步的是,所述步骤4中,具体过程包括:
28、基于sac理论,式(4)表示被控对象想要实现对式(5)表示参考模型渐进跟踪,则其控制输入表示为:
29、
30、式中,ey表示受控对象与参考模型的误差,xm表示参考模型的状态,um表示参考模型的输入信号,ke、kx和ku分别表示为关于ey、xm和um的时变增益矩阵,表示为下述形式:
31、
32、
33、
34、式中,γe、γx和γu决定自适应性的矩阵系数,σ用于消除外界扰动对控制增益的影响。
35、有益效果:
36、本发明针对在轨航天器的相对运动建模与控制问题,设计了相对运动自适应控制方法,通过实施例表明,该控制方法在控制对象存在建模不确定性项、未知干扰以及控制能力有限等影响因素下,仍有良好的控制效果。
技术特征:1.一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,所述步骤1中,具体过程包括:
3.如权利要求2所述的一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,所述步骤2中,根据抵近探测任务要求设计全流程标称飞行轨迹包括:标称飞行轨迹的设计考虑到技术特性、任务要求以及安全性限制的众多约束因素,设计为直线平移和椭圆绕飞两种形式,同时为使得分段轨迹之间平滑过渡,在关键点引入悬停模式。
4.如权利要求3所述的一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,所述步骤2中,对于始末位置固定的直线平移轨迹设计采用多项式插值原理,将标称轨迹的数学描述表示为相对位置l、相对速度与时间相关的多项式函数:
5.如权利要求4所述的一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,所述步骤2中,所述引入相对位置l的各阶导数构造剩余n-1个边界条件包括
6.如权利要求4所述的一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,椭圆绕飞轨迹设计与所述直线平移轨迹设计方法基本相同,区别在于椭圆绕飞轨迹设计中将绕飞角度θ及其各阶导数作为插值变量,插值多项式系数的确定过程与直线平移相同。
7.如权利要求1所述的一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,所述步骤3中,将相对轨道动力学模型和标称飞行轨迹表示为状态空间表达式包括:
8.如权利要求7所述的一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,所述步骤4中,具体过程包括:
技术总结本发明提供了一种面向微小航天器抵近探测任务的相对运动自适应控制方法,其特征在于,包括以下步骤:步骤1,将抵近探测对象视为目标航天器,将微小航天器视为服务航天器,构建两者之间的相对轨道动力学模型;步骤2,根据抵近探测任务要求设计全流程标称飞行轨迹,包括一些关键悬停点、悬停点之间转移轨迹和转移时间的参数;步骤3,将相对轨道动力学模型和标称飞行轨迹分别采用状态空间进行表示;步骤4,将标称飞行轨迹视为参考模型,将相对轨道动力学模型视为被控对象,运用自适应控制理论SAC设计相对运动自适应控制器。本发明在控制对象存在建模不确定性项、未知干扰以及控制能力有限等影响因素下,仍有良好的控制效果。技术研发人员:刘建彪,肖余之,徐峰,李鹏,祝强军,郭晶受保护的技术使用者:上海宇航系统工程研究所技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219658.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。