一种无人驾驶飞行器的制作方法
- 国知局
- 2024-08-01 05:25:36
本技术涉及飞行器,特别涉及一种无人驾驶飞行器。
背景技术:
1、无人驾驶飞行器是指能够在没有人操控的情况下进行飞行任务的飞行器。它可以根据预先设定的航线和任务参数进行自主飞行,无需人工干预。无人驾驶飞行器可以用于各种领域的应用,如军事侦察、货物运输、航拍摄影、灾害监测等。
2、但现有的无人驾驶飞行器仍然存在一些缺点,例如,落地保护措施不足,无人驾驶飞行器在遭遇落地时通常缺乏足够的保护措施,可能导致飞行器的设备或机身损坏,特别是在高速飞行或不平整的地面条件下,缺乏有效的减震或防护系统,容易导致摔落并造成损坏,经过检索后发现,申请号为cn202090000766.9的实用新型提供的技术方案同样存在上述的问题。
技术实现思路
1、本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种无人驾驶飞行器,通过缓冲块、转动杆、支撑架、滑杆、限位块、弹簧实现飞行器落地时的减震效果,避免飞行器落地时不小心造成损坏,从而提高飞行器的使用寿命,减少损坏风险,同时通过防护套筒、第一卡块、第二卡块可以在飞行对风扇进行保护,且可以在第一卡块、第二卡块上安装外部防护盖在日常放置时来保护风扇不受灰尘、水汽的影响,简单便捷。
2、本实用新型还提供具有上述一种无人驾驶飞行器,包括:
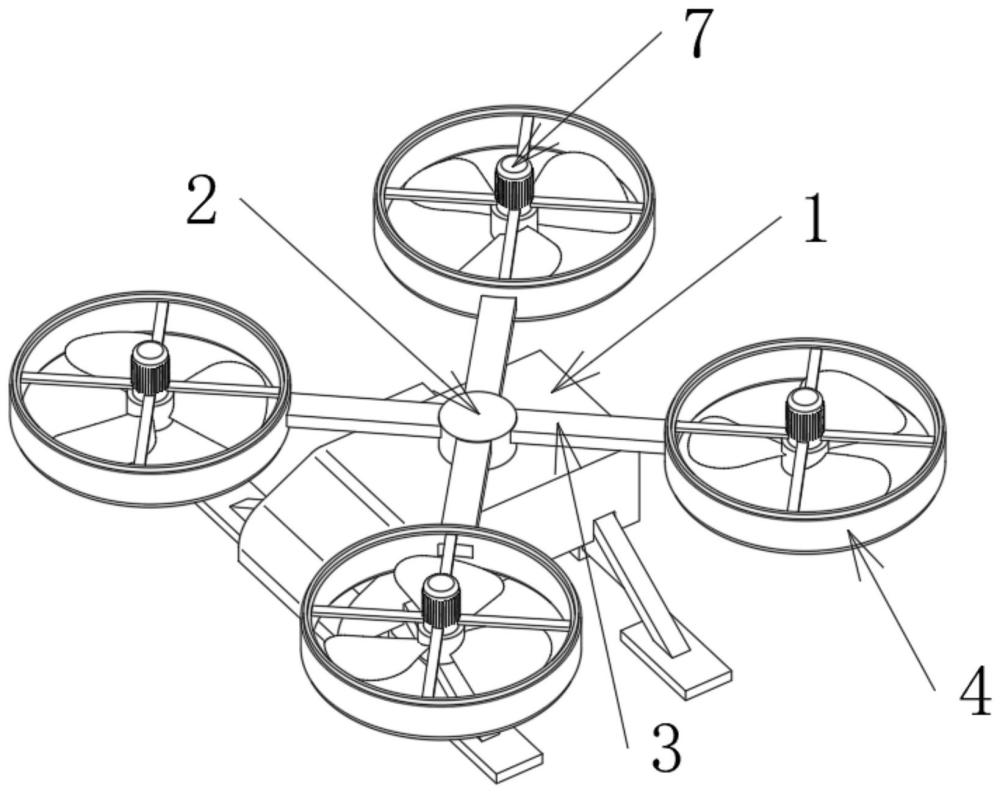
3、飞行器本体,所述飞行器本体的上表面固定连接有固定柱,所述固定柱的外表面固定连接有连接杆,所述连接杆远离固定柱的一端固定连接有防护套筒,所述防护套筒的上表面固定连接有第一卡块,所述防护套筒的下表面固定连接有第二卡块,所述防护套筒的内表面固定连接有连接十字架,所述连接十字架的上表面固定连接有电机,所述电机的输出端固定连接有转轴,所述转轴的外表面固定连接有风扇。
4、所述飞行器本体的下表面固定连接有缓冲块,所述飞行器本体的外表面设置有翻转槽,所述翻转槽的内表面固定连接有转动杆,所述转动杆的外表面转动连接有支撑架,所述支撑架远离转动杆的一端固定连接有垫腿,所述支撑架的内侧壁固定连接有滑杆,所述滑杆远离支撑架的一端固定连接有限位块,所述滑杆的外表面设置有弹簧。
5、根据所述的一种无人驾驶飞行器,所述连接杆的数量为四个且环形阵列分布,所述风扇与防护套筒的内表面相适配,用于保护风扇不受损坏。
6、根据所述的一种无人驾驶飞行器,所述转轴的外表面与连接十字架转动连接,所述防护套筒的数量为四个且矩形阵列分布。
7、根据所述的一种无人驾驶飞行器,所述第一卡块的直径小于防护套筒的直径,所述第二卡块的直径小于防护套筒的直径,便于加装外部保护盖。
8、根据所述的一种无人驾驶飞行器,所述滑杆的外表面与缓冲块滑动连接,所述限位块与缓冲块的内表面滑动连接。
9、根据所述的一种无人驾驶飞行器,所述弹簧的一端与限位块相接触,所述弹簧的另一端与缓冲块固定连接。
10、根据所述的一种无人驾驶飞行器,所述转动杆的外表面与飞行器本体固定连接,所述飞行器本体、电机均与外部电源电性连接。
11、根据所述的一种无人驾驶飞行器,所述支撑架的数量为四个且矩形阵列分布,所述翻转槽的内表面与支撑架相接触。
12、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:1.一种无人驾驶飞行器,其特征在于,包括:飞行器本体(1),所述飞行器本体(1)的上表面固定连接有固定柱(2),所述固定柱(2)的外表面固定连接有连接杆(3),所述连接杆(3)远离固定柱(2)的一端固定连接有防护套筒(4),所述防护套筒(4)的上表面固定连接有第一卡块(5),所述防护套筒(4)的下表面固定连接有第二卡块(6),所述防护套筒(4)的内表面固定连接有连接十字架(7),所述连接十字架(7)的上表面固定连接有电机(8),所述电机(8)的输出端固定连接有转轴(9),所述转轴(9)的外表面固定连接有风扇(10);
2.根据权利要求1所述的一种无人驾驶飞行器,其特征在于,所述连接杆(3)的数量为四个且环形阵列分布,所述风扇(10)与防护套筒(4)的内表面相适配。
3.根据权利要求1所述的一种无人驾驶飞行器,其特征在于,所述转轴(9)的外表面与连接十字架(7)转动连接,所述防护套筒(4)的数量为四个且矩形阵列分布。
4.根据权利要求1所述的一种无人驾驶飞行器,其特征在于,所述第一卡块(5)的直径小于防护套筒(4)的直径,所述第二卡块(6)的直径小于防护套筒(4)的直径。
5.根据权利要求1所述的一种无人驾驶飞行器,其特征在于,所述滑杆(15)的外表面与缓冲块(11)滑动连接,所述限位块(16)与缓冲块(11)的内表面滑动连接。
6.根据权利要求1所述的一种无人驾驶飞行器,其特征在于,所述弹簧(17)的一端与限位块(16)相接触,所述弹簧(17)的另一端与缓冲块(11)固定连接。
7.根据权利要求1所述的一种无人驾驶飞行器,其特征在于,所述转动杆(12)的外表面与飞行器本体(1)固定连接,所述飞行器本体(1)、电机(8)均与外部电源电性连接。
8.根据权利要求1所述的一种无人驾驶飞行器,其特征在于,所述支撑架(13)的数量为四个且矩形阵列分布,所述翻转槽(18)的内表面与支撑架(13)相接触。
技术总结本技术公开了一种无人驾驶飞行器,包括飞行器本体,所述飞行器本体的上表面固定连接有固定柱,所述固定柱的外表面固定连接有连接杆,所述连接杆远离固定柱的一端固定连接有防护套筒,所述防护套筒的上表面固定连接有第一卡块,所述防护套筒的下表面固定连接有第二卡块。通过缓冲块、转动杆、支撑架、滑杆、限位块、弹簧实现飞行器落地时的减震效果,避免飞行器落地时不小心造成损坏,从而提高飞行器的使用寿命,减少损坏风险,同时通过防护套筒、第一卡块、第二卡块可以在飞行对风扇进行保护,且可以在第一卡块、第二卡块上安装外部防护盖在日常放置时来保护风扇不受灰尘、水汽的影响,简单便捷。技术研发人员:矫文斌,高炳哲受保护的技术使用者:青岛守正智能装备有限公司技术研发日:20231016技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/219680.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表