电缆巡检无人机的制作方法
- 国知局
- 2024-08-01 05:28:14
本技术涉及一种电缆巡检无人机。
背景技术:
1、随着无人机技术的发展,无人机已经广泛应用于电缆巡检领域,其中摄像装置是无人机进行电缆巡检的重要设备,但现有技术中的电缆巡检无人机其摄像装置多为固定设置,使用不够灵活,比如授权公告号为cn206401803u的中国实用新型专利中公开了一种电力巡线巡检无人机,其在无人机本体下侧设有摄像装置,而授权公告号为cn216186093u的中国实用新型专利中也公开了一种低空电缆电力巡检无人机,其在无人机本体前侧设有摄像头,上述无人机的摄像装置均为固定设置,而授权公告号为cn207572847u的中国实用新型专利中公开了一种用于输电线路的无人机巡检装置,其在外壳底端转动连接两根第一连接杆,第一连接杆的内部滑动连接第二连接杆和第三连接杆,两根第三连接杆上的锯齿分别与齿轮的顶端与底端啮合,电机带动齿轮转动,进而使第三连接杆伸长带动第二连接杆伸长,并使待巡检的电线位于挡板内,然后利用挡板内部转动连接的第一摄像头和外壳底端居中处的第二摄像头对电线进行观察,但该装置需要使电线位于挡板中,由于无人机为远程控制,这就对无人机操控提出了较高要求,一旦控制不精确,很容易出现意外事故导致电线损坏。
技术实现思路
1、本实用新型的目的在于提供一种电缆巡检无人机,其通过第一摄像头和第二摄像头配合巡检,并且第二摄像头移动同时也可以摆动调整观察角度。
2、本实用新型的目的是通过以下技术方案来实现的:
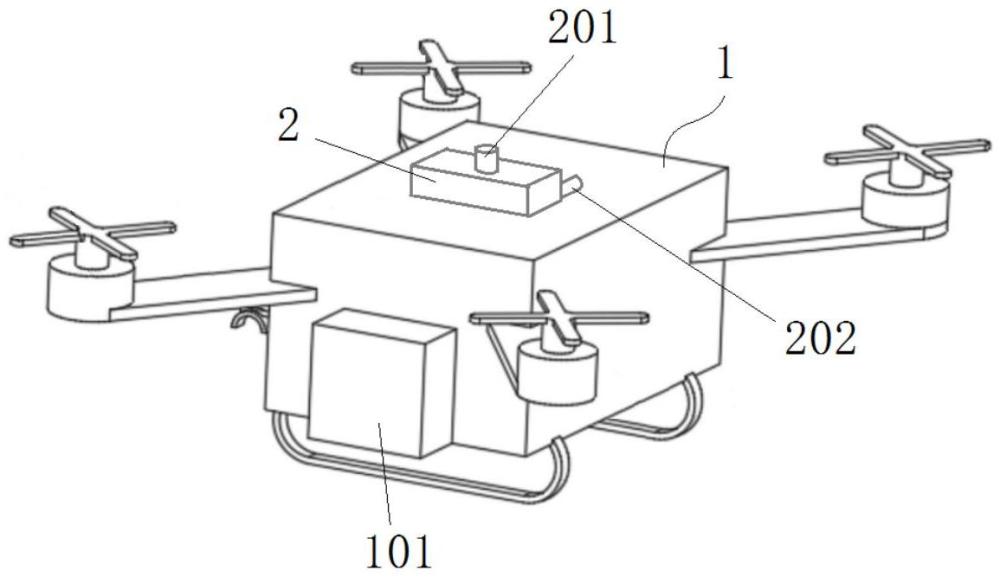
3、一种电缆巡检无人机,包括无人机本体和摄像头驱动组件,其中无人机本体前侧设有第一摄像头,无人机本体上侧和下侧均设有摄像头驱动组件,所述摄像头驱动组件包括安装座和设于所述安装座上的驱动电机、主动链轮、从动链轮、驱动链条、驱动链轮和第二摄像头,其中主动链轮通过驱动电机驱动转动,主动链轮和从动链轮通过驱动链条连接,并且驱动链条一侧与驱动链轮啮合,所述安装座上设有摄像头滑槽和滑块滑槽,其中所述滑块滑槽内设有滑块,所述驱动链轮下侧设有驱动链轮轴,并且所述驱动链轮轴与所述滑块转动连接,第二摄像头设于所述摄像头滑槽中,并且所述驱动链轮轴下端与所述第二摄像头后端固连。
4、所述主动链轮下侧设有第一链轮轴,并且所述第一链轮轴通过轴承支撑安装于所述安装座上,所述驱动电机固定在所述安装座上,并且所述第一链轮轴与所述驱动电机的动力轴固连。
5、所述从动链轮下侧设有第二链轮轴,并且所述第二链轮轴通过轴承支撑安装于所述安装座上。
6、所述滑块内设有套装于所述驱动链轮轴上的滑块轴承。
7、所述滑块两侧设有凸起部,所述滑块滑槽的两侧槽壁上设有开槽,并且所述凸起部分别设于对应的开槽中。
8、所述安装座上设有护罩,并且所述主动链轮、从动链轮、驱动链条和驱动链轮均设于所述护罩中。
9、本实用新型的优点与积极效果为:
10、1、本实用新型通过第一摄像头和第二摄像头配合巡检,其中第二摄像头在直线移动的同时也发生摆动,从而既可以扩大第二摄像头的观察范围,也可以改变第二摄像头的角度以对准电缆进行准确观察,当不需要第二摄像头进行巡检观察时,所述第二摄像头还可以倒伏于摄像头滑槽中,并且本实用新型通过第二摄像头移动和摆动可以实现一定距离范围内对电缆进行观察,从而降低了无人机操控要求。
11、2、本实用新型可根据需要通过第一摄像头和第二摄像头配合实现多种巡检模式,比如第一摄像头可以进行初步巡检,当发现电缆某处异常时,操作人员可控制无人机本体悬停在电缆异常处,并利用无人机本体上侧或下侧的第二摄像头移动和摆动对电缆异常处进行仔细观察,或者本实用新型也可以直接利用无人机本体上侧或下侧的第二摄像头进行巡检作业,此时第二摄像头位置需保持固定,当一次巡检完成后,第二摄像头再变换角度进行二次巡检。
技术特征:1.一种电缆巡检无人机,其特征在于:包括无人机本体(1)和摄像头驱动组件(2),其中无人机本体(1)前侧设有第一摄像头(101),无人机本体(1)上侧和下侧均设有摄像头驱动组件(2),所述摄像头驱动组件(2)包括安装座(203)和设于所述安装座(203)上的驱动电机(202)、主动链轮(204)、从动链轮(206)、驱动链条(205)、驱动链轮(207)和第二摄像头(201),其中主动链轮(204)通过驱动电机(202)驱动转动,主动链轮(204)和从动链轮(206)通过驱动链条(205)连接,并且驱动链条(205)一侧与驱动链轮(207)啮合,所述安装座(203)上设有摄像头滑槽(2031)和滑块滑槽(2032),其中所述滑块滑槽(2032)内设有滑块(208),所述驱动链轮(207)下侧设有驱动链轮轴(2071),并且所述驱动链轮轴(2071)与所述滑块(208)转动连接,第二摄像头(201)设于所述摄像头滑槽(2031)中,并且所述驱动链轮轴(2071)下端与所述第二摄像头(201)后端固连。
2.根据权利要求1所述的电缆巡检无人机,其特征在于:所述主动链轮(204)下侧设有第一链轮轴,并且所述第一链轮轴通过轴承支撑安装于所述安装座(203)上,所述驱动电机(202)固定在所述安装座(203)上,并且所述第一链轮轴与所述驱动电机(202)的动力轴固连。
3.根据权利要求1所述的电缆巡检无人机,其特征在于:所述从动链轮(206)下侧设有第二链轮轴,并且所述第二链轮轴通过轴承支撑安装于所述安装座(203)上。
4.根据权利要求1所述的电缆巡检无人机,其特征在于:所述滑块(208)内设有套装于所述驱动链轮轴(2071)上的滑块轴承(2082)。
5.根据权利要求1所述的电缆巡检无人机,其特征在于:所述滑块(208)两侧设有凸起部(2081),所述滑块滑槽(2032)的两侧槽壁上设有开槽,并且所述凸起部(2081)分别设于对应的开槽中。
6.根据权利要求1所述的电缆巡检无人机,其特征在于:所述安装座(203)上设有护罩,并且所述主动链轮(204)、从动链轮(206)、驱动链条(205)和驱动链轮(207)均设于所述护罩中。
技术总结本技术涉及一种电缆巡检无人机,其中无人机本体前侧设有第一摄像头,无人机本体上侧和下侧均设有摄像头驱动组件,所述摄像头驱动组件包括安装座和设于安装座上的驱动电机、主动链轮、从动链轮、驱动链条、驱动链轮和第二摄像头,其中主动链轮通过驱动电机驱动转动,主动链轮和从动链轮通过驱动链条连接,并且驱动链条一侧与驱动链轮啮合,安装座上设有摄像头滑槽和滑块滑槽,其中滑块滑槽内设有滑块,驱动链轮下侧设有驱动链轮轴,并且驱动链轮轴与滑块转动连接,第二摄像头设于摄像头滑槽中,并且驱动链轮轴下端与第二摄像头后端固连。本技术通过第一摄像头和第二摄像头配合巡检,并且第二摄像头移动同时也可以摆动调整观察角度。技术研发人员:郑洋,白晗,吴迪,刘旭,卢毅,李涛,孙柏强,刘洋,伏恒逸,冯天民,杨长龙,李林,屠剑飞,周榆晓,刘莹,孙语谦,王明军,曲兴山,孙思桐,曲永航,宋阳,徐日升,卜凡强,丁大超受保护的技术使用者:国网辽宁省电力有限公司沈阳供电公司技术研发日:20230725技术公布日:2024/4/24本文地址:https://www.jishuxx.com/zhuanli/20240722/219927.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表