基于视觉暂留效应的多向显示无人机和无人机群的制作方法
- 国知局
- 2024-08-01 05:28:43
本技术涉及视觉成像领域,尤其涉及一种基于视觉暂留效应的多向显示无人机和无人机群。
背景技术:
1、人眼在观察景物时,光信号传入大脑神经,需经过一段短暂的时间,光的作用结束后,视觉形象并不立即消失,这种残留的视觉称“后像”,视觉的这一现象则被称为“视觉暂留”,而这种残留的视觉通常会在人脑中停留0.1-0.4秒。
2、借助视觉残留效应,很多商店、景区等地均设计或购买了一种装置,该装置的大体结构类似于美国专利us20230018982a1,通过将led灯条高速转动,在其发光侧能够形成一个圆盘状的图像,图像可进行时间、文字甚至视频的显示,用以吸引顾客和游客;现阶段,这种技术被广泛应用在展览展示、飞行、文旅等领域。
3、现有技术中,中国专利cn111731495b,美国专利us10410559b2均采用在无人机螺旋桨上嵌设或安装led灯条,并通过led灯条的旋转以使无人机在空中能够通过余晖效应/视觉暂留效应将无人机底部的文字、图像甚至视频进行显示,并通过飞行进行传播,但是该种安装方式存在以下问题:
4、现有技术中均将led灯条嵌设安装在无人机的螺旋桨上,而无人机在降落或升高的时候,会导致螺旋桨的重力增加,不利于提供足够的升力使无人机进行升降,另一方面,由于无人机的螺旋桨通常为一体成型,其曲率、倾角和斜度均固定,而无论是嵌设还是粘贴led灯条都有可能导致螺旋桨的曲率、倾角和斜度发生改变,从而影响螺旋桨转动时的稳定性和螺旋桨本身的强度,同样不利于无人机的升降,综上,现有技术存在待改进之处。
技术实现思路
1、本实用新型其一目的是提供一种能不影响无人机动力螺旋桨的起停稳定性,而以视觉暂留效应进行展示的无人机。
2、本实用新型其二目的是提供一种能不影响无人机动力螺旋桨的起停稳定性,而以视觉暂留效应进行展示的无人机群。
3、为此,本实用新型提供了一种基于视觉暂留效应的多向显示无人机,其特征在于,包括:
4、无人机主体;
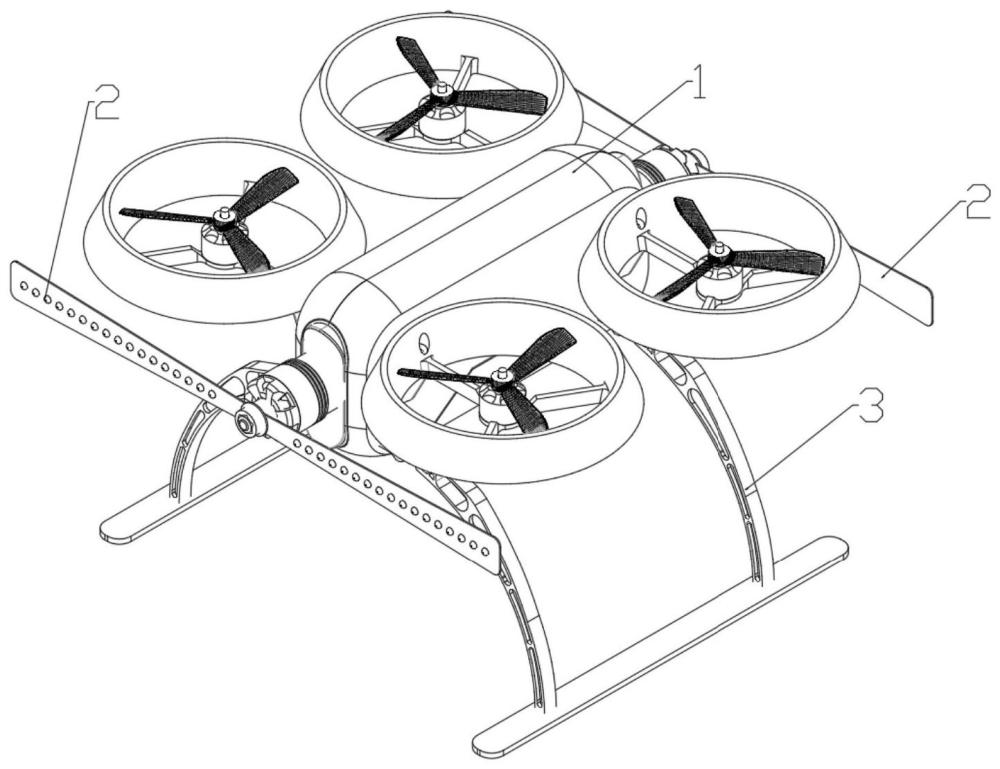
5、至少二灯显成像组件,至少二所述灯显成像组件分别设于所述无人机主体的侧部,所述灯显成像组件包括电机、螺旋叶和多个led灯珠,所述电机设于所述无人机主体上,所述螺旋叶安装于所述电机的输出轴,所述螺旋叶的叶片剖面弦与旋转平面夹角为0,多个所述led灯珠沿所述螺旋叶的长度方向布设并随所述螺旋叶的转动实现视觉暂留效应成像;
6、控制系统,所述控制系统至少控制连接于所述无人机主体、所述电机和所述led灯珠。
7、较佳的,还包括磁吸起落架,所述磁吸起落架安装于所述无人机主体底部,所述磁吸起落架底部具有与磁吸起落平台磁吸对接的磁吸件。
8、较佳的,所述磁吸起落架至少包括二支撑悬臂,所述支撑悬臂一端连接于所述无人机主体,另一端设有所述磁吸件。
9、较佳的,所述电机设于所述无人机主体的侧部,所述输出轴面向侧面,所述螺旋叶设于所述输出轴;所述支撑悬臂位于至少二所述灯显成像组件的螺旋叶之间。
10、较佳的,所述支撑悬臂为弧形。
11、较佳的,所述支撑悬臂包括二支撑臂杆,二所述支撑臂杆并排设置。
12、较佳的,所述磁吸件至少底部被实施为一磁吸平面。
13、较佳的,所述磁吸件为磁吸支撑垫片,所述磁吸平面被定义为所述磁吸支撑垫片的底面。
14、较佳的,所述螺旋叶为平面螺旋叶片,多个所述led灯珠设于所述平面螺旋叶片的面外侧。
15、以上技术方案单独或者结合表现出以下有益效果:
16、本实用新型通过将灯显成像组件和无人机主体的动力螺旋桨分开设置,因此相比于传统的无人机中led灯条嵌设安装在无人机的螺旋桨上的方式,不会导致螺旋桨的重力增加,不影响升力对无人机的升降作用;而且灯显成像组件的螺旋叶的叶片剖面弦与旋转平面夹角为0,即不产生任何推进力,因此也不影响无人机主体螺旋桨转动时的稳定性,而且可以设置多向显示。
17、在无人机主体上设置具有磁吸功能的起落架,在无人机停落的时候,能够配合磁吸起落平台完成磁吸固定,帮助稳定无人机主体重心,而不会因为灯显成像组件中螺旋叶的转动而导致停落损伤和不稳。
18、采用弹性减震型支撑悬臂,能够减少起停时的震动,提高稳定性。
19、本实用新型还提供了一种基于视觉暂留效应的多向显示无人机群,其特征在于,包括多个基于视觉暂留效应的多向显示无人机,多个所述基于视觉暂留效应的多向显示无人机呈阵列排布。
20、以上技术方案单独或者结合表现出以下有益效果:
21、本实用新型通过将灯显成像组件和无人机主体的动力螺旋桨分开设置,因此相比于传统的无人机中led灯条嵌设安装在无人机的螺旋桨上的方式,不会导致螺旋桨的重力增加,不影响升力对无人机的升降作用;而且灯显成像组件的螺旋叶的叶片剖面弦与旋转平面夹角为0,即不产生任何推进力,因此也不影响无人机主体螺旋桨转动时的稳定性,而且可以设置多向显示。
22、在无人机主体上设置具有磁吸功能的起落架,在无人机停落的时候,能够配合磁吸起落平台完成磁吸固定,帮助稳定无人机主体重心,而不会因为灯显成像组件中螺旋叶的转动而导致停落损伤和不稳。
23、采用弹性减震型支撑悬臂,能够减少起停时的震动,提高稳定性。
技术特征:1.基于视觉暂留效应的多向显示无人机,其特征在于,包括:
2.根据权利要求1所述的基于视觉暂留效应的多向显示无人机,其特征在于:所述支撑悬臂为弧形。
3.根据权利要求2所述的基于视觉暂留效应的多向显示无人机,其特征在于:所述支撑悬臂包括二支撑臂杆,二所述支撑臂杆并排设置。
4.根据权利要求1所述的基于视觉暂留效应的多向显示无人机,其特征在于:所述磁吸件至少底部被实施为一磁吸平面。
5.根据权利要求4所述的基于视觉暂留效应的多向显示无人机,其特征在于:所述磁吸件为磁吸支撑垫片,所述磁吸平面被定义为所述磁吸支撑垫片的底面。
6.根据权利要求1所述的基于视觉暂留效应的多向显示无人机,其特征在于:所述螺旋叶为平面螺旋叶片,多个所述led灯珠设于所述平面螺旋叶片的面外侧。
7.基于视觉暂留效应的多向显示无人机群,其特征在于,包括上述权利要求1~6中任意一项所述的多个基于视觉暂留效应的多向显示无人机,多个所述基于视觉暂留效应的多向显示无人机呈阵列排布。
技术总结本申请提供了一种基于视觉暂留效应的多向显示无人机和无人机群,属于视觉成像领域,其中无人机包括无人机主体、至少两个灯显成像组件和控制系统。其中,至少两个灯显成像组件分别设于无人机主体的侧部,灯显成像组件包括电机、螺旋叶和多个LED灯珠,电机设于无人机主体上,螺旋叶安装于电机的输出轴,螺旋叶的叶片剖面弦与旋转平面夹角为0,多个LED灯珠沿螺旋叶的长度方向布设并随螺旋叶的转动实现视觉暂留效应成像,控制系统至少控制连接于无人机主体、电机和LED灯珠。技术研发人员:党征刚,沈煜,张兵受保护的技术使用者:像航(如东)科技有限公司技术研发日:20230619技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/219964.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表