一种可空中变构型重组的小型多旋翼无人飞行器集群
- 国知局
- 2024-08-01 05:32:53
本发明涉及飞行器,具体是涉及一种可空中变构型重组的小型多旋翼无人飞行器集群。
背景技术:
1、当前在空中实现重组或分离的概念有子母机,亦有可实现在水平平面进行连接的组合飞行器。
2、相对提及较多的有空天母舰,空天母舰是相似于子母机的概念,即通过巨大的母舰/母机作为支撑载体,实现中转站的功能,进而支撑各类飞行器在母舰/母机上进行起降或飞行。母舰/母机的主要作用是实现承载和中转,并且往往体积巨大,难以实现降噪飞行、低气动干扰和小型越障等优势,而其航行速度也远不如其所能承载的飞行器,所以母舰/母机的出现经常是搭配各种辅助飞行器进行集群作业。
3、而在水平面实现连接的组合飞行器往往只能单一形式进行极其有限的组合,譬如:横列连接或纵列连接的方式进行依次连接。这样的连接方式会导致合体后的飞行器体积激增,迎风面积增加,气动力或气动效率急剧降低或稳定性差等问题。
4、而对于小型多旋翼无人飞行器因其特有的优点,自出现以来一直是小型飞行器备受青睐的一种构型。多旋翼自身可以平衡旋转带来的扭矩,并可以控制转速的高低实现姿态控制从而避免了复杂的旋翼变距系统,这一优势使得小型飞行器具备了更加灵活的飞行性能也有着更好的机动能力。但优点的突出也对应了一些缺点,小型多旋翼无人飞行器的续航能力差、飞行速度低、有效载重小、气动干扰严重、稳定性不好等,这些问题都制约并影响着小型多旋翼无人飞行器的发展。
5、而对于可组合可分体的多旋翼飞行器,可在水平方向组合的飞行器随着组合的数量增加,组合后的体积激增,不再具有小型飞行器的灵活性强,操纵性简单等优点,自身重量大幅提升的同时气动阻力也会提高。虽然水平方向的组合会让飞行器的载重和飞行速度得到一定的提升,但这种性能的提升是以牺牲巨大的气动效率作为前提的;除此之外,水平方向的组合需要保证其在空间位置上的精准控制,难度极大,同时容错率极低,极容易出现自身撞机的危险。
6、为此本发明提出一种可空中变构型重组的小型多旋翼无人飞行器集群。
技术实现思路
1、本发明的目的是提供一种可空中变构型重组的小型多旋翼无人飞行器集群,以解决上述现有技术存在的问题,组合和分体操纵难度小、容错率高、体积小,同时能够获得更高的气动效率。
2、为实现上述目的,本发明提供了如下方案:
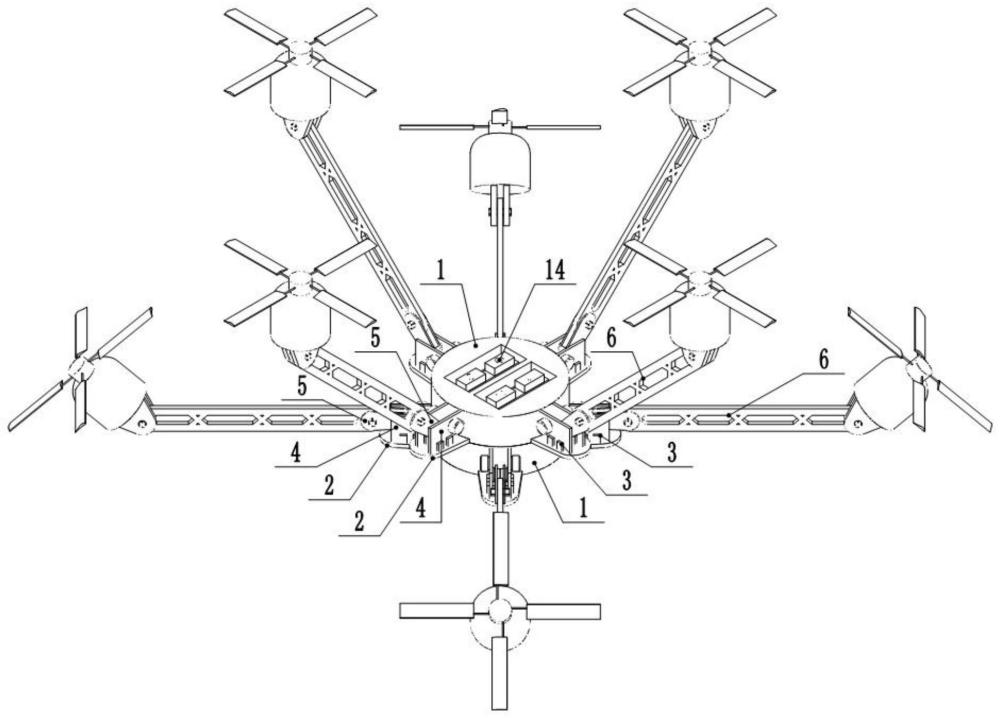
3、本发明提供了一种可空中变构型重组的小型多旋翼无人飞行器集群,包括两组飞行单元,两组所述飞行单元均包括中央盘体、多组倾转舵机、多个连接元件、多个工作旋翼和多个旋翼电机,多组所述倾转舵机围绕所述中央盘体的周向安装,各组所述倾转舵机均对应连接一所述连接元件,各所述连接元件上远离所述倾转舵机的一端均对应连接一所述旋翼电机,各所述旋翼电机上均对应连接一所述工作旋翼并用于驱动所述工作旋翼旋转产生升力,所述倾转舵机能够驱动所述连接元件转动,并调整所述连接元件与所述中央盘体之间的夹角,所述中央盘体上设有锁紧元件;分体工作状态时,两组所述飞行单元不接触,且各所述连接元件与对应的所述中央盘体的上端面之间的夹角为钝角;合体预备状态时,两组所述飞行单元不接触,且一组所述飞行单元中,所述连接元件与所述中央盘体的上端面之间的夹角为直角,另一组所述飞行单元中,所述连接元件与对应的所述中央盘体的上端面之间的夹角为钝角;合体工作状态时,两组所述飞行单元上下排列并使两组所述锁紧元件连接锁紧,且位于上方的所述飞行单元中,所述连接元件与对应的所述中央盘体的上端面之间的夹角为钝角,位于下方的所述飞行单元中,所述连接元件与所述中央盘体的上端面之间的夹角为直角。
4、优选的,所述中央盘体的外周一体成型有多个舵机支撑盘,各所述舵机支撑盘的上端面均对应安装一组所述倾转舵机,每组所述倾转舵机为两个,且各所述倾转舵机通过固定块安装于所述舵机支撑盘上,同一所述舵机支撑盘上的两个所述倾转舵机对称设置于所述连接元件的两侧。
5、优选的,各所述飞行单元中,所述舵机支撑盘、所述连接元件、所述工作旋翼和所述旋翼电机的数量均为四个。
6、优选的,所述连接元件包括两个机械扭臂、一个机械连杆和两个连接壁板,两个所述机械扭臂分别位于所述机械连杆一端的两侧,且两个所述机械扭臂的一端分别与两个所述倾转舵机转动连接,两个所述机械扭臂的另一端均连接所述机械连杆的一端,所述机械连杆的另一端与两个所述连接壁板连接,且两个所述连接壁板对称安装于所述机械连杆的两侧,各所述连接壁板均与所述旋翼电机的外壳连接。
7、优选的,所述机械扭臂与所述倾转舵机之间通过转轴连接,所述转轴的横截面为大割圆形。
8、优选的,所述机械扭臂和所述连接壁板上均开设有花键槽,所述机械扭臂与所述机械连杆之间通过扭臂花键轴连接,所述机械连杆与所述连接壁板之间通过旋翼花键轴连接。
9、优选的,所述连接壁板与所述旋翼电机的外壳之间铆接固定。
10、优选的,所述中央盘体的中部开设有多个安装孔,所述锁紧元件包括锁定架和多组锁定块,各组所述锁定块分别安装于各所述安装孔内,且所述锁定块与所述安装孔的内壁之间形成锁定凹槽,各组所述锁定块的中部均安装有一舵机作动轴,所述锁定架安装于所述中央盘体的下端,两组所述飞行单元相互靠近时,位于上方的所述飞行单元中的所述锁定架能够伸入至位于下方的所述飞行单元中的所述锁定凹槽内,此时位于下方的所述飞行单元中的所述舵机作动轴在锁定舵机的驱动下带动位于下方的所述飞行单元中的所述锁定块转动90°,并使位于下方的所述飞行单元中的所述锁定块对位于上方的所述飞行单元中的所述锁定架卡接锁定。
11、优选的,分体工作状态时,两组所述飞行单元中,各所述连接元件与对应的所述中央盘体的上端面之间的夹角均为135°;合体预备状态时,一组所述飞行单元中,所述连接元件与所述中央盘体的上端面之间的夹角为90°,另一组所述飞行单元中,所述连接元件与对应的所述中央盘体的上端面之间的夹角为135°;合体工作状态时,位于上方的所述飞行单元中,所述连接元件与对应的所述中央盘体的上端面之间的夹角为135°,位于下方的所述飞行单元中,所述连接元件与所述中央盘体的上端面之间的夹角为90°。
12、本发明相对于现有技术取得了以下技术效果:
13、本发明提供的可空中变构型重组的小型多旋翼无人飞行器集群,倾转舵机能够驱动连接元件转动,并调整连接元件与中央盘体之间的夹角,进而通过调整连接元件和中央盘体的夹角使分体单元处于不同姿态,以满足不同的使用需要,改善因合体或分体导致的气动干扰等问题,并且合体后仍可以以原有的多旋翼操纵形式进行操纵,中央盘体上设有锁紧元件,能够便于在两组飞行单元合体使用时,对两组飞行单元进行连接;分体工作状态时,两组飞行单元不接触,且各连接元件与对应的中央盘体的上端面之间的夹角为钝角,分体工作状态能够降低因合体导致的严重气动干扰,具有更高的飞行可操纵性和飞行性能,且分体后可以作为独立的工作单元,有更小的体积、更高的灵活性和操纵性,可以实现狭小空间或复杂环境飞行,具备极强的多任务并行能力,有成为临时信号传输基站的潜力,同时,分体后可编队集群控制,通过声压相消实现低噪声飞行;合体预备状态时,两组飞行单元不接触,且一组飞行单元中,连接元件与中央盘体的上端面之间的夹角为直角,另一组飞行单元中,连接元件与对应的中央盘体的上端面之间的夹角为钝角;合体工作状态时,整体载重能力可以得到提高,飞行速度得以提升,两组飞行单元上下排列并使两组锁紧元件连接锁紧,竖直合体的设置能够避免水平合体导致的体积激增和随之而来的气动阻力增加等问题,位于上方的飞行单元中,连接元件与对应的中央盘体的上端面之间的夹角为钝角,位于下方的飞行单元中,连接元件与中央盘体的上端面之间的夹角为直角,进而使得合体后两组飞行单元中的各工作旋翼之间互不干扰。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220300.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。