基于X翼型的串列翼布局的复合翼飞行器的制作方法
- 国知局
- 2024-08-01 05:42:52
本发明涉及无人飞行器,具体涉及基于x翼型的串列翼布局的复合翼飞行器。
背景技术:
1、倾转旋翼机的飞行包线要同时大于常规直升机和螺旋桨飞机,在技术上由于发动机短舱可以倾转,使得倾转旋翼机既可以像直升机那样悬停或垂直飞行,也可以像固定翼飞机拥有较高的巡航速度以及较大的航程。这就意味着它可以执行比常规直升机和螺旋桨飞机更多的任务,先进性不言而喻。
2、但实际上,此类倾转旋翼机的飞行事故也层出不穷,因为倾转旋翼机旋翼半径要比同等吨位的直升机小得多,一旦发动机失效,由于其桨叶惯性矩较小,旋翼转速会快速下降,旋翼拉力迅速降低,致使倾转旋翼机快速坠向地面。另一方面,发动机短舱向前倾转,旋翼拉力方向逐渐由垂直向上转为水平向前,这就要求过程中飞行速度要不断增加,以增大机翼升力,保持全机垂向受力平衡以及俯仰力矩的平衡,但是,在这一过程中,旋翼尾流将产生畸变,旋翼与机翼会形成非常复杂的气动干扰,而且由于旋翼较小,诱导速度很大,气动干扰会非常强烈,这就使得飞行控制的难度大大增加,极易导致飞机坠落。
技术实现思路
1、为此,本发明提供基于x翼型的串列翼布局的复合翼飞行器,以解决现有技术中由于旋翼和固定翼互相干扰而导致飞机坠落的问题。
2、为了实现上述目的,本发明提供如下技术方案:
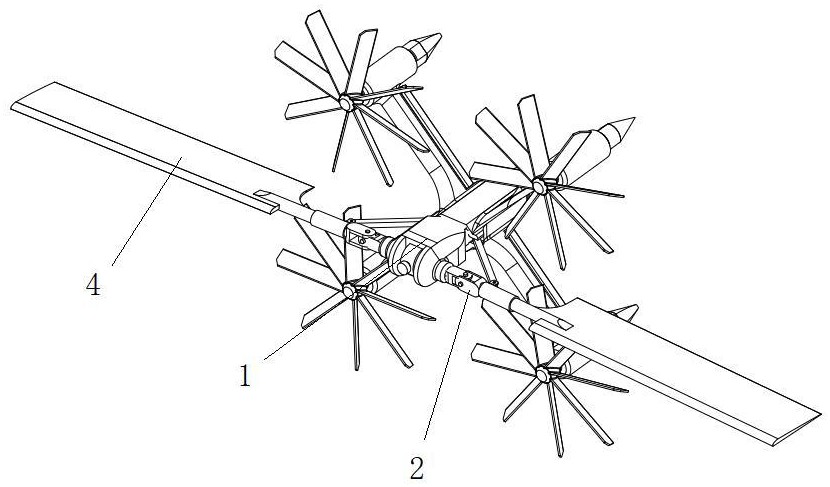
3、本发明公开了基于x翼型的串列翼布局的复合翼飞行器,包括:
4、机头,尾部活动设置在机身的前端、并适于沿机身的长度方向做伸缩活动,所述机身的尾端弹性安装有机尾;
5、动力控制装置,分别安装在主翼的端部,所述机身四周一体固定有四个所述主翼、并呈x形布局,所述主翼上还安装有与所述动力控制装置传动连接的副翼扰流板;
6、飞翼,安装在变幅机构上,所述机头两侧对称安装有一对变幅机构、并适于通过所述变幅机构带动一对飞翼展开;
7、其中,飞行器在飞行过程中,包括如下飞行模式:
8、一、起飞模式,机身竖直向上,锥形尾和机尾支撑地面,旋翼水平高速旋转,带动机身、主翼和飞翼离开地面;
9、二、巡航模式,机身空中向上飞行时,飞翼展开、并且步进电机通过万向节带动飞翼偏转,调整机身姿态,使得机身水平向前行进,并通过调整板体偏转角度来控制行进方向;
10、三、降落模式,首先,利用飞翼和副翼扰流板,使得机身爬升,然后收拢飞翼,并提高旋翼转速,通过旋翼提供升力辅助机身减速降落。
11、进一步的,机身在巡航模式中关闭动力、并借助主翼和飞翼在空中滑翔,以降低能耗。
12、进一步的,所述变幅机构包括:
13、转轴,一端与飞翼同轴固定连接、另一端通过万向节与机头相连;
14、滑套,滑动套设在转轴上、并与连杆的一端铰接,所述连杆的另一端与机身铰接;
15、其中,当机头回缩时,通过万向节带动飞翼展开,同时所述机头适于通过万向节带动飞翼偏转。
16、进一步的,所述机头包括:
17、电池包,两端设置有一对步进电机,任意一个所述步进电机均与万向节相连;
18、监控摄像头,设置在所述电池包前端,所述电池包尾端设置有伸缩电机,所述伸缩电机的主轴与所述机身相连。
19、进一步的,所述副翼扰流板包括:
20、回转轴,沿所述主翼的长度方向转动设置,且端部与软轴一端同轴传动连接,所述软轴另一端与所述动力控制装置传动连接;
21、板体,长度方向与所述回转轴一体连接,并适于在所述动力控制装置的带动下与主翼形成偏转角度。
22、进一步的,动力控制装置包括:
23、旋翼,端部与高速电机同轴传动连接;
24、偏转电机,末端安装有锥形尾,偏转电机的前端与所述高速电机尾部同轴相连,且与所述软轴一端同轴传动连接。
25、进一步的,所述高速电机的数量若干,且均为伺服电机、并分别独立与控制器相连。
26、进一步的,所述锥形尾和机尾均为空心结构、并适于漂浮在水面上。
27、进一步的,所述机身、主翼和飞翼均为碳纤维结构。
28、进一步的,所述机身的尾端活动插设有机尾,且所述机尾与机身之间安装有弹簧。
29、进一步的,所述机身底部设置有led显示灯,以便在夜间追踪飞行器的方位。
30、本发明具有如下优点:
31、本申请公开的技术方案,不仅可以通过旋翼高速旋转提供升力,方便起飞降落,同时还可以通过旋翼提供诱导速度,同时利用主翼和飞翼提供升力,从而提高航程并降低能耗,相比较单纯仅采用旋翼或常规固定翼进行起飞的飞行器,其飞行效率得到明显提高。
32、此外,本发明公开了的飞行方式,主要利用飞翼和副翼扰流板改变机身的飞行姿态,使得机身在空中俯仰机动,然后通过高速转动的旋翼实现飞行器稳定,与现有技术采用倾转发动机短舱方式相比,无需增加飞行速度来保持全机垂向受力平衡以及俯仰力矩的平衡,并且有效抑制固定翼和旋翼之间产生的畸变干扰,从而显著提高飞行器在起飞降落时的安全性。
技术特征:1.基于x翼型的串列翼布局的复合翼飞行器,其特征在于,包括:
2.如权利要求1所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述变幅机构(2)包括:
3.如权利要求2所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述机头(1)包括:
4.如权利要求3所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述副翼扰流板(9)包括:
5.如权利要求4所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,动力控制装置(3)包括:
6.如权利要求5所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述高速电机(32)的数量若干,且均为伺服电机、并分别独立与控制器相连。
7.如权利要求6所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述锥形尾(5)和机尾(6)均为空心结构、并适于漂浮在水面上。
8.如权利要求7所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述机身(7)、主翼(8)和飞翼(4)均为碳纤维材质。
9.如权利要求1所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述机身(7)的尾端活动插设有机尾(6),且所述机尾(6)与机身(7)之间安装有弹簧。
10.如权利要求1所述的基于x翼型的串列翼布局的复合翼飞行器,其特征在于,所述机身(7)底部设置有led显示灯。
技术总结本发明公开的基于X翼型的串列翼布局的复合翼飞行器,属于无人飞行器技术领域,包括机头、动力控制装置以及飞翼,其中机身的前端活动设置有机头,并且,机身四周一体固定有四个主翼,主翼的端部分别安装有一个动力控制装置,动力控制装置与副翼扰流板传动连接,并利用副翼扰流板对四个主翼的上、下流速差进行调节,从而控制四个主翼的升力,机头适于沿机身的长度方向做伸缩活动,并能通过变幅机构带动飞翼展开,由此对飞行器的翼展比进行调节,从而改变机翼的诱导阻力,提高飞机的机动性和航程。此外,在机身的尾端弹性安装有机尾,飞行器在空中巡航时,利用呈锥体的机尾降低风阻,由此进一步提高飞行器的飞行里程和滞空时间。技术研发人员:焦允则,吴正斌,王彩凤,霍焱,苑鸣祥受保护的技术使用者:天津中科先进技术产业有限公司技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/221041.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
设置有抓取臂的无人机
下一篇
返回列表