一种湖泊深水采样装置及方法
- 国知局
- 2024-08-01 05:48:26
本发明涉及水质监测领域,具体涉及一种湖泊深水采样装置及方法。
背景技术:
1、我国湖泊、水库众多,湖库水质的优劣与人们的生活息息相关,湖库采样是水文建设一项最基本而又至关重要的工作,每年在湖库采样工作中投入了大量的人力、物力。仅仅依靠人工携带采样与检测设备乘普通船进行采样,投入采样成本高且取得效率较低,难以满足目前我国大量湖库的采样需求。
2、现有技术中采用大型船只对海洋水质采样已经不适用湖泊、水库的采样,大型船只运输困难,成本高。并且利用船只驾驶到湖泊、水库中央进行采样,需要专门的人员登船,针对一些高海拔湖泊、水库,由于其风浪大,给工作人员带来极大危险。随着科学技术的发展,利用无人驾驶技术针对高海拔的湖泊、水库水质采样成为可能,但是由于高海拔、高山的湖泊、水库风浪大,不适用无人驾驶船的采样,并且,针对深水定点的采样,无人驾驶船到达位置不精准,造成采样定位误差,采样装置到达预定位置后,由于大风浪的影响,会产生移位的现象,导致采样装置到达深水层的位置不精准。
技术实现思路
1、针对现有技术的上述不足,本发明提供了一种湖泊深水采样装置及方法,解决现有技术中采样成本高、采样过程危险以及采样定位不准确的问题。
2、为达到上述发明目的,本发明所采用的技术方案为:
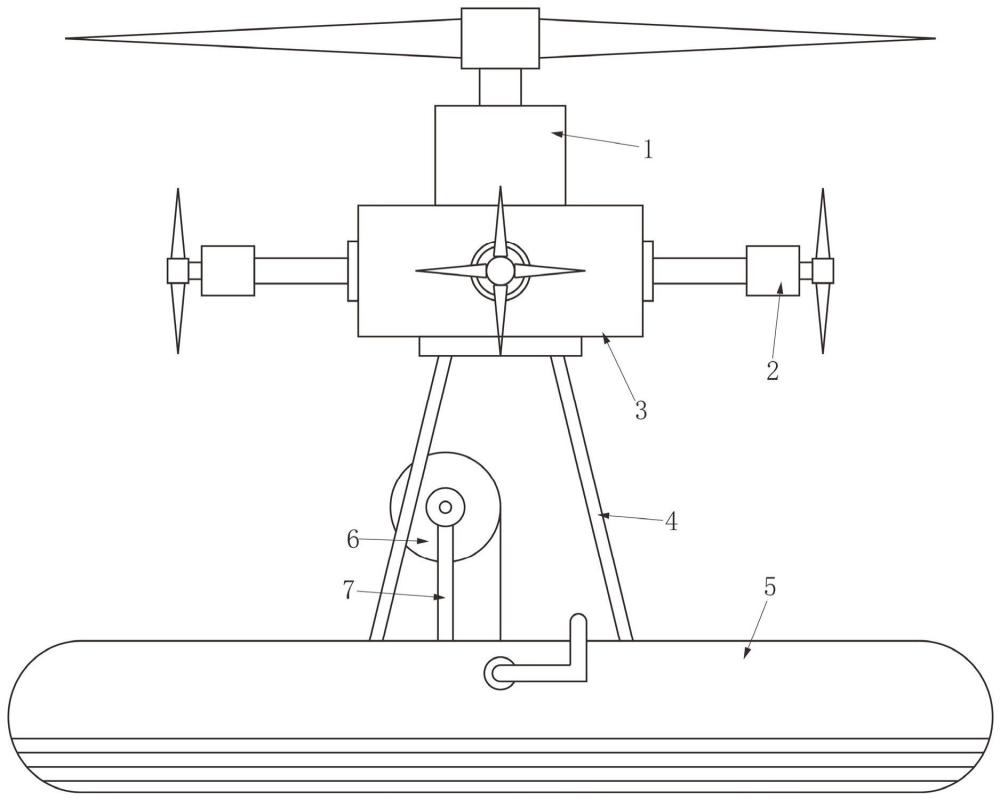
3、提供一种湖泊深水采样装置,其包括充气橡皮船和采样器,充气橡皮船的船面设置为安装面,安装面的上端通过支架安装有无人机,无人机包括无人机主体,无人机主体的侧面四个方向均匀设置有侧面螺旋桨,侧面螺旋桨的推力垂直于竖向平面,无人机主体的上端设置有升降螺旋桨;
4、安装面的中部设置有贯穿充气橡皮船底部的条形通孔,条形通孔的上方通过支撑架安装有卷扬机,卷扬机通过电机驱动转动,卷扬机上缠绕有将采样器送入湖泊深水区的牵引线,牵引线从条形通孔穿过进入湖泊内,条形通孔与卷扬机之间设置有遥感电位计;
5、安装面上设置有控制箱,控制箱内安装有电池和总控制器,电机、无人机和电池均与总控制器电连接。
6、进一步地,采样器包括外壳体,外壳体的中部通过隔板分割成控制腔和取水腔,取水腔的底部设置有进水口,进水口上设置有滤网;控制腔内设置有取水控制器、无线模块和充电电池;取水腔的顶部设置有液位传感器,进水口上设置有取水阀,液位传感器、无线模块、充电电池和取水阀均与取水控制器电连接。
7、进一步地,控制箱内也设置有无线模块,无线模块与远端的遥控器无线通信,充气橡皮船的充气口上通过充气管连接充气泵,充气管上安装有压力传感器和充气阀,充气泵、压力传感器和充气阀均与总控制器电连接。
8、提供一种采用上述湖泊深水采样装置的采样方法,其包括以下步骤:
9、s1:获取目标湖泊的地形数据和水位数据,建立目标湖泊的三维模型,沿着湖泊底部的泥床取采样参照点,在每个采样参照点正上方的预设高度h2取采样区域的中心,采样区域为垂直于水平面的正方形,在采样参照点的正上方的水面上取采样固定点;
10、s2:建立在目标湖泊进行采样的三维采样坐标系0-xyz,三维采样坐标系以目标湖泊的水质监测站为原点,x0y平面与目标湖泊的湖面平行,z轴垂直于湖面,获取采样固定点在三维采样坐标系中的坐标(x1,y1,z1);
11、s3:获取水质监测站的gps定位坐标(j0,w0),将定位坐标(j0,w0)转换成大地三维坐标系下的坐标(x0,y0,z0):
12、
13、其中,r为地球的平均半径,h为水质监测站的海拔高度,e为地球的椭圆率;
14、s4:利用坐标(x0,y0,z0)和采样固定点的坐标(x1,y1,z1)计算采样固定点在大地三维坐标系下的坐标(x1,y1,z1);
15、
16、s5:根据坐标(x1,y1,z1)计算采样固定点在gps定位坐标系下的定位坐标(j1,w1):
17、
18、其中,h1为目标湖泊的湖面的海拔高度,h为无人机距离充气橡皮船的高度;
19、s6:将定位坐标(j1,w1)发送给无人机,无人机携带充气橡皮船达到坐标(j1,w1)位置并悬停,关闭升降螺旋桨,充气橡皮船落在湖面上,打开侧面螺旋桨,通过侧面螺旋桨驱动充气橡皮船保持在采样固定点位置;
20、s7:卷扬机工作释放牵引线,使采样器缓慢进入湖底,根据遥感电位计采集的牵引线倾斜角度α和方向γ,计算采样器到达采样区域卷扬机需要释放的牵引线长度l,以及充气橡皮船需要修正的距离d;
21、
22、其中,h3为采样参照点的深度,k1为目标湖泊的暗流对采样器位置的影响系数,l1为目标湖泊内的暗流单位时间流动的距离,k2为目标湖泊的水面风对充气橡皮船移动的影响系数,l2为侧向风单位时间的移动距离,k3为目标湖泊的表面水流对充气橡皮船移动的影响系数,l2为表面水流单位时间的移动距离,t1为卷扬机释放长度l的牵引线所需的时间;
23、s8:侧面螺旋桨驱动充气橡皮船向方向γ相反的方向移动距离d,对采样固定点位置的位置进行修正,得到精确采样固定点;
24、s9:以精确采样固定点作为中心点,边长为d的正方形区域作为移动区域,移动区域位于水面上,在移动区域内均匀取若干采样移动点,移动区域平行投射到湖底深水层上形成边长为d的正方形的采样区域,采样区域的中心作为采样中心,采样区域平行投射的方向与牵引线的长度、方向一致,移动区域内的采样移动点投射到采样区域内形成若干采样点;
25、s10:从精确采样固定点开始,侧面螺旋桨带动充气橡皮船在移动区域内根据采样点的对应位置依次移动,使采样器到达每个采样点,并根据采样中心的深度(h3-h2)计算每个采样点上需要向取水腔装入的液位a;
26、
27、其中,s为取水腔的底面积,v为取水腔在大气压下的体积,p1为采样区域的水压值,p为大气压的压力值,k4为水压条件下对取水腔体积变化的影响系数;
28、s11:采样器到达每个采样点后,打开取水阀,湖水经过进水口进入取水腔,当取水腔内的液位传感器检测到液位达到a时,关闭取水阀,卷扬机工作将采样器提升到充气橡皮船内,完成水样采集;
29、s12:每个采样点上对应的水样采集完成后,提取每份水样,并对水样进行过滤,测量过滤出的杂质质量m和每份水样的总质量m,检测每份水样的杂质率p:
30、
31、s13:设置水样的杂质率阈值p阈值;若p>p阈值,则判定该份水样的杂质率过高,该采样点太靠近湖底或湖边,该水样作废;若p≤p阈值,则判定该份水样满足要求;
32、s14:筛选出所有满足要求的水样,并将所有满足要求的水样内的杂质去除后进行混合,得混合水样,并测量混合水样的体积v;
33、s15:将混合水样的体积v与水质监测需要的水样体积阈值v阈值进行比较:
34、若v≥v阈值,则判断该次采样满足要求,完成目标湖泊的水样采集;
35、若v<v阈值,则判断该次采样不满足要求,返回步骤s1,重新选择采样参照点,并执行步骤s1-s14,直到采集到满足要求的混合水样。
36、本发明的有益效果为:本方案用于高海拔、高山湖泊的深水区进行采样,通过无人机携带采样的充气橡皮船进入湖泊中心区域,充气橡皮船质量轻,能有效减少无人机的能耗,充气橡皮船停靠在湖面上,无人机无需悬停耗能,能长时间在湖面上进行采样作业。充气橡皮船停靠在湖面上时,还可通过无人机侧面螺旋桨对位置进行实时修正,确保采样定位的精准性。同时,本发明的采样方法充分考虑到了湖面的风向、水下的水流对采样的影响,实现无人机精确的定位,并同时对采样点进行修正,避免风浪带来的定位影响,使采样器能准确的到达预定的采样位置,确保采集的水样满足要求。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221513.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。