一种双飞翼结构的四旋翼垂直升降混合飞行机器人
- 国知局
- 2024-08-01 05:54:59
本发明涉及儿童书桌,具体为一种双飞翼结构的四旋翼垂直升降混合飞行机器人。
背景技术:
1、无人机是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。它可以在无人驾驶的条件下完成复杂空中飞行任务和各种负载任务,因此也被视为一种“空中飞行机器人”,随着无人机技术的快速发展,其在航拍、侦察、救援等多个领域得到了广泛应用,而固定翼无人机是无人机中的一种,固定翼无人机是军用和多数民用无人机的主流平台。
2、然而,传统的固定翼无人机虽然具备飞行速度快、飞行续航时间长的优点,但是传统的固定翼无人机在起降时需要限制条件,或需要跑道、或需要弹射装置,给无人机的使用条件带来较多的不便,虽然目前具有垂直起降固定翼无人机,解决了固定翼无人机起降问题,但是垂直起降固定翼无人机的载重能力一般,不能在地面上以车辆的形式进行运动,在遇到狭窄的空间时不方便通过,降低了无人机的适用范围。
技术实现思路
1、本发明的目的在于提供一种双飞翼结构的四旋翼垂直升降混合飞行机器人,以解决上述背景技术中提出的问题。
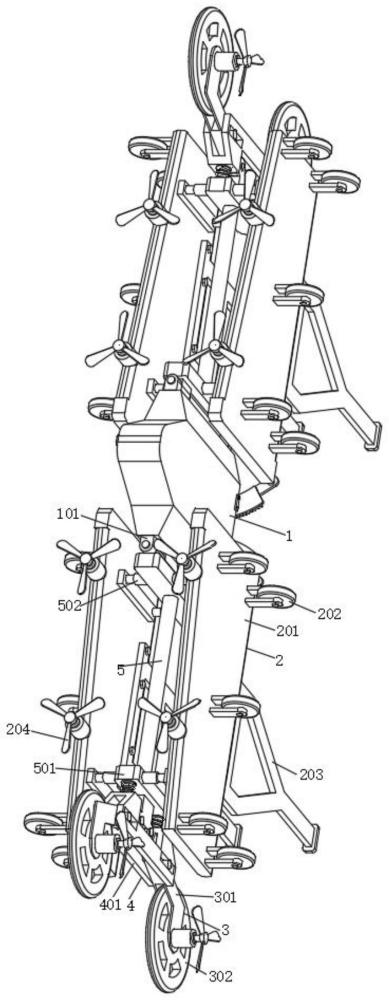
2、为实现上述目的,本发明提供如下技术方案:一种双飞翼结构的四旋翼垂直升降混合飞行机器人,包括飞行器机体、双飞翼机构、支撑机构、限位机构、移动机构和驱动机构,所述飞行器机体的两侧设置有支撑机构,所述支撑机构包括支撑骨架,所述支撑骨架与飞行器机体之间转动连接,所述支撑骨架的顶部与底部设置有双飞翼机构,所述双飞翼机构包括机翼、移动滚轮和第一螺旋桨,所述机翼与支撑骨架之间活动连接,所述机翼的表面转动安装有移动滚轮,所述机翼的前端设置有第一螺旋桨;
3、所述飞行器机体的后端固定安装有限位机构,所述限位机构包括限位盘与齿条,所述限位盘与飞行器机体固定安装,限位盘的表面等距分布有齿条,所述限位盘的后端滑动安装有移动机构,所述移动机构包括移动架和电动推杆,所述移动架与限位盘滑动连接,所述移动架的表面滑动连接有驱动机构,所述驱动机构包括滑动架、驱动马达、传动齿轮和活动杆,所述滑动架与移动架之间滑动连接,所述移动架与滑动架之间固定连接有电动推杆,所述滑动架的表面固定安装有驱动马达,所述驱动马达的输出端连接有传动齿轮,所述传动齿轮与齿条配合连接,所述滑动架与机翼之间活动连接有活动杆。
4、优选的,所述飞行器机体与支撑骨架之间通过活动轴活动安装,所述支撑骨架与机翼之间通过伸缩架活动连接。
5、优选的,所述支撑骨架的外侧设置有摇臂机构,所述摇臂机构包括支撑臂、支撑轮、活动座、滑桩和第二螺旋桨,所述支撑臂与支撑骨架之间通过活动座活动安装,所述支撑臂的一端转动连接有支撑轮,所述支撑臂的外侧固定安装有滑桩,所述支撑臂的顶部设置有第二螺旋桨。
6、优选的,所述支撑臂的外侧设置有缓冲机构,所述缓冲机构包括活动架和移动槽,所述支撑臂的外侧滑动安装有活动架,所述活动架的表面开设有移动槽,所述移动槽与滑桩配合连接。
7、优选的,所述缓冲机构还包括阻尼机构,所述阻尼机构包括阻尼伸缩杆和缓冲弹簧,所述活动架与支撑骨架之间固定连接有阻尼伸缩杆,所述阻尼伸缩杆的外侧套接有缓冲弹簧。
8、优选的,所述限位机构还包括轨道滑槽,所述限位盘的内部开设有轨道滑槽,所述移动机构还包括滑块,所述移动架的内侧固定安装有滑块,所述轨道滑槽与滑块之间配合连接。
9、优选的,所述双飞翼机构还包括起落架,所述机翼的内侧固定安装有起落架,所述起落架延伸出机翼的后端。
10、优选的,所述第一螺旋桨为多组等距分布,所述移动滚轮均匀分布在机翼的上表面与下表面。
11、与现有技术相比,本发明的有益效果是:
12、1、本发明通过设置有双飞翼机构与支撑机构,能够通过机翼上表面与小表面均匀分布有移动滚轮,能够不用区分正反方向,可以使移动滚轮贴合在地面,通过多组第一螺旋桨提供动力,能够实现无人机在地面上以车辆的形式进行跑动,有效的提高了无人机的载重能力,通过支撑机构具备可折叠功能,能够通过支撑机构的折叠效果可以带动双飞翼机构进行同步折叠,能够实现机翼进行变形,可以使机翼边缘处的移动滚轮与地面接触,可以缩短整体的长度,能够通过较为狭窄的空间进行穿越;
13、2、本发明通过设置有限位机构、移动机构与驱动机构,能够通过驱动机构在移动机构上进行移动,可以利用活动杆调节机翼之间的间距,能够方便在飞行以及在地面移动的过程中,可以降低整体的高度,使无人机能够穿越比较矮的涵洞等场所,有效的提高了适用范围;
14、3、本发明通过设置有摇臂机构与缓冲机构,能够通过摇臂机构中的支撑轮延伸出机翼的两侧,可以在飞行过程中实现对机翼边缘处进行保护,能够在与物体发生碰撞时,可以通过支撑轮与物体接触,通过支撑轮的滚动,能够有效的改变撞击方向,起到卸力的作用,在碰撞时,通过摇臂机构中的支撑臂能够发生翻转活动,可以通过缓冲机构对支撑臂进行缓冲,能够在碰撞时可以减少冲击力度,有效的保证了机翼不易受到损伤,同时在机翼进行翻转变形时,可以同时使支撑轮倾斜与地面接触,能够参与对整体支撑的作用,可以在地面移动的过程中,配合移动滚轮能够有效的提高整体在地面运动的稳定效果,加强了无人机的载重效果。
技术特征:1.一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:包括飞行器机体(1)、双飞翼机构(2)、支撑机构(5)、限位机构(6)、移动机构(7)和驱动机构(8),所述飞行器机体(1)的两侧设置有支撑机构(5),所述支撑机构(5)包括支撑骨架(501),所述支撑骨架(501)与飞行器机体(1)之间转动连接,所述支撑骨架(501)的顶部与底部设置有双飞翼机构(2),所述双飞翼机构(2)包括机翼(201)、移动滚轮(202)和第一螺旋桨(204),所述机翼(201)与支撑骨架(501)之间活动连接,所述机翼(201)的表面转动安装有移动滚轮(202),所述机翼(201)的前端设置有第一螺旋桨(204);
2.根据权利要求1所述的一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:所述飞行器机体(1)与支撑骨架(501)之间通过活动轴(101)活动安装,所述支撑骨架(501)与机翼(201)之间通过伸缩架(502)活动连接。
3.根据权利要求1所述的一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:所述支撑骨架(501)的外侧设置有摇臂机构(3),所述摇臂机构(3)包括支撑臂(301)、支撑轮(302)、活动座(303)、滑桩(304)和第二螺旋桨(305),所述支撑臂(301)与支撑骨架(501)之间通过活动座(303)活动安装,所述支撑臂(301)的一端转动连接有支撑轮(302),所述支撑臂(301)的外侧固定安装有滑桩(304),所述支撑臂(301)的顶部设置有第二螺旋桨(305)。
4.根据权利要求3所述的一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:所述支撑臂(301)的外侧设置有缓冲机构(4),所述缓冲机构(4)包括活动架(401)和移动槽(402),所述支撑臂(301)的外侧滑动安装有活动架(401),所述活动架(401)的表面开设有移动槽(402),所述移动槽(402)与滑桩(304)配合连接。
5.根据权利要求4所述的一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:所述缓冲机构(4)还包括阻尼机构(9),所述阻尼机构(9)包括阻尼伸缩杆(901)和缓冲弹簧(902),所述活动架(401)与支撑骨架(501)之间固定连接有阻尼伸缩杆(901),所述阻尼伸缩杆(901)的外侧套接有缓冲弹簧(902)。
6.根据权利要求1所述的一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:所述限位机构(6)还包括轨道滑槽(603),所述限位盘(601)的内部开设有轨道滑槽(603),所述移动机构(7)还包括滑块(703),所述移动架(701)的内侧固定安装有滑块(703),所述轨道滑槽(603)与滑块(703)之间配合连接。
7.根据权利要求1所述的一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:所述双飞翼机构(2)还包括起落架(203),所述机翼(201)的内侧固定安装有起落架(203),所述起落架(203)延伸出机翼(201)的后端。
8.根据权利要求1所述的一种双飞翼结构的四旋翼垂直升降混合飞行机器人,其特征在于:所述第一螺旋桨(204)为多组等距分布,所述移动滚轮(202)均匀分布在机翼(201)的上表面与下表面。
技术总结本发明公开了一种双飞翼结构的四旋翼垂直升降混合飞行机器人,包括飞行器机体、双飞翼机构、支撑机构、限位机构、移动机构和驱动机构,飞行器机体的两侧设置有支撑机构,支撑机构包括支撑骨架,支撑骨架与飞行器机体之间转动连接,支撑骨架的顶部与底部设置有双飞翼机构,双飞翼机构包括机翼、移动滚轮和第一螺旋桨,机翼与支撑骨架之间活动连接,机翼的表面转动安装有移动滚轮,机翼的前端设置有第一螺旋桨;本发明能够实现无人机在地面上以车辆的形式进行跑动,有效的提高了无人机的载重能力,能够实现机翼进行折叠变形,可以使机翼边缘处的移动滚轮与地面接触,可以缩短整体的长度,能够通过较为狭窄的空间进行穿越。技术研发人员:何诚,刘莉涵,刘柯珍,王越,白家林,李涵锋,徐颢语,王嘉朔,顾馨悦受保护的技术使用者:南京森林警察学院技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/221944.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表