一种含有图传信号增程装置的无人机的制作方法
- 国知局
- 2024-08-01 05:56:51
本技术涉及无人机,特别是涉及一种含有图传信号增程装置的无人机。
背景技术:
1、随着无人机的普及,越来越多的行业开始逐渐使用无人机进行各种工作,而无人机因为本身性能的原因,飞行距离不够远,在加上周边建筑、树木等因素的影响,无人机的图传技术无法达到工作需求,因此无人机团传信号增程装置和图传智能分析装置便有了较为重要的作用,以达到满足无人机的发展需求。无人机图传信号是由发射功率和接收信号灵敏度决定的,在普通的无人机装置中,一般采用的都是2.4ghz或者5.8gh发射功率的信号发射器,图传信号的范围都是有限的,而无人机图传信号增程装置的安装则能够增强其信号覆盖范围。
2、随着无人机技术的愈加成熟,无人机在巡检方面有了更加频繁的应用,而无人机图传智能分析技术便是其进行此项工作的关键所在,其能够根据飞行中检测到的图像特征,来对图像进行识别分类,还可以根据无人机图传智能分析技术自动分别出人体等特征,从而对其进行标识,在根据工作需要进行一定的追踪或者其它方面的处理。无人机图传增强技术对于无人机的应用来说有着极其重要的作用,它不仅能够增加无人机的工作应用范围,还能够一定程度上增强其工作效率,在不同行业的无人机应用上,其均能够因此装置而发挥出较出色的作用,有利于推动无人机行业的快速发展,以达到满足更多用户需求的目的。
3、常见的无人机图传信号增程方式,无人机图传信号能够受到多方面因素的影响,不管是电磁干扰还是多云多雨天气都能够影响到无人机接收信号的灵敏度和信号传输中间的衰减功率,想要进行无人机图传信号增程,一方面可以依靠专业人员对无人机的发射功率和接收功率进行调整,另一方面比较重要的增程方法便是调整遥控器端天线和无人机端天线,但天线增程存在着较为明显的方向性,会出现信号传输不稳定的问题,主要原因有操作者手部的晃动和视线不佳而定向不准,因此天线增程应该在信号传输方向上进行优化。
4、申请号202022929233.3,申请日2020.12.09实用新型名称为“一种具备遥控距离增程的多旋翼无人机”的专利中记载“[0015]相较于现有技术,本实用新型的有益效果是:通过设置遥控器可拆卸天线接口,由单一固定接口改为灵活可更换接口,便于加装高增益定向双频天线,同时在无人机和遥控器的内部均设置功率放大芯片,在信号发射始端增强信号,以便于将信号更好更强的传递到无人机,使无人机接收到的信号更加优越,从而增加无人机直线飞行距离,进而增加无人机的作业半径。”其并未考虑对“加装的高增益定向双频天线”的自动调向,仍需人工匹配天线和无人机的定向问题。另外其也没有针对可调向的定向双频天线进行防扭动保护,如果其在遥控过程中不小心被碰到或者跌落,定向双频天线会对舵机内部的减速部件造成干扰和伤害。
技术实现思路
1、本实用新型针对现有技术中无人机天线的传输距离仍需提高的问题,提供一种结构合理、传输高效可靠的含有图传信号增程装置的无人机。
2、本实用新型的技术解决方案是,提供一种具有以下结构的含有图传信号增程装置的无人机:含有无人机和图传信号增程装置,图传信号增程装置和无人机之间无线通讯,图传信号增程装置含有遥控器、舵机、阻尼套管、舵机控制模块、舵机电源模块和定向平板天线,遥控器前侧通过舵机铰接定向平板天线的一侧,铰接处设有阻尼套管,舵机的电源输入端连接舵机电源模块的输出端,舵机的控制信号输入端连接舵机控制模块的控制信号输出端,舵机电源模块含有直流降压芯片jw5060t,其sw端通过电容连接bst端,且通过滤波电路连接gnd端,其vin端通过滤波电路接地,且通过反接二极管后接入vcc,其fb端通过反馈电阻接地,其en端通过电阻反接二极管后接入vcc。
3、优选地,所述阻尼套管为橡胶管或塑料管。
4、优选地,所述定向平板天线中的信号放大器的型号为bga622lna,其in1接口接入定向平板天线,vcc4脚接入3.3v电源,gnd2脚接入系统gnd,out3脚接入无人机射频接口。
5、优选地,所述定向平板天线中的无线射频功放的射频放大芯片的型号为pma3-14ln+,其中rf-in接入无人机遥控器射频发射接口,rfout接入双工合路器。
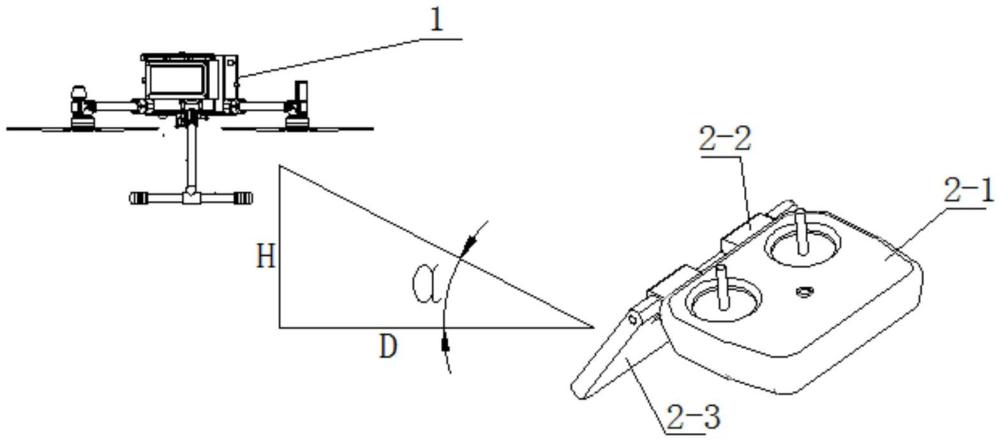
6、优选地,所述舵机控制模块中主控芯片的型号为gd32f407ret6,舵机控制模块的pb6和pb7管脚通过串口和无人机控制模块进行通讯,读取无人机传回的高度和距离信号后,通过公式α=arctan(h/d)计算出无人机与遥控器所在水平面的夹角α,其中h为无人机相对于遥控器的高度,d为无人机相对于遥控器的距离d,主控芯片的pb1管脚连接舵机的管脚1,向其发送不同频率的pwm波对舵机进行角度调整,舵机的管脚2连接舵机电源模块的正极,管脚3连接舵机电源模块的负极。
7、优选地,所述舵机控制模块中gd32f407ret6的u0_tx、u0_rx管脚通过uart接口连接无人机控制模块,并通过无人机遥控器的电池供电。
8、优选地,所述舵机转动角度为β,其中0°≤β≤90°。
9、优选地,所述舵机的型号为ds1906。
10、与现有技术相比,本实用新型含有图传信号增程装置的无人机具有以下优点:
11、1、将传统的棒状天线改为定向平板天线,在无人机遥控器上设置舵机带动其翻转,根据无人机高度和距离的关系算出定向平板天线的俯仰角,同时此处的连接方式选为阻尼连接或柔性连接,避免定向平板天线在操作中无意碰到人、物体或者不小心跌落的情况下损坏舵机。
12、2、采用低噪声放大器bga622lna器件和pma3-14ln+射频放大芯片,使无人机发射功率在20dbm的基础上此电路可实现13dbm的功率增加,使无人机遥控器的信号发射功率由100wm转变为2000mw。
13、3、地面遥控器通过读取无人机的高度和距离,计算出舵机工作角度的控制命令,舵机控制模块接收命令后,向舵机发送不同占空比的pwm信号,从而实时控制舵机达到不同的控制角度。
14、4、无人机图传增强技术对于无人机的应用来说有着极其重要的作用,它不仅能够增加无人机的工作应用范围,还能够一定程度上增强其工作效率,在不同行业的无人机应用上,其均能够因此装置而发挥出较出色的作用,有利于推动无人机行业的快速发展,以达到满足更多用户需求的目的。
15、附图说明
16、图1是本实用新型的工作场景示意图;
17、图2是本实用新型中图传信号增程装置的立体结构示意图;
18、图3是本实用新型中图传信号增程装置的侧视结构示意图;
19、图4是本实用新型中图传信号增程装置的俯视的结构示意图;
20、图5是本实用新型图4中标号a部分的结构示意图;
21、图6是本实用新型中信号收发部分的原理图;
22、图7是本实用新型中低噪声放大器部分的结构示意图;
23、图8是本实用新型中无线射频功放部分的结构示意图;
24、图9是本实用新型中舵机控制模块的结构示意图;
25、图10是本实用新型中舵机电源模块的结构示意图;
26、图11是本实用新型中舵机控制接口的结构示意图;
27、图12是本实用新型中uart接口的结构示意图。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222072.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。