一种飞机机轮刹车系统防滑保护控制方法与流程
- 国知局
- 2024-08-01 06:01:16
本发明涉及飞机机轮刹车,具体是一种飞机机轮刹车系统防滑保护控制方法。
背景技术:
1、飞机机轮刹车系统是飞机的最重要的系统之一,在飞机的起飞和着陆过程中起着重要的作用。在飞机接地后机轮刹车系统防滑保护功能工作,用于确定机轮充分转动和飞机同速后,机轮刹车系统才能够输出刹车压力,有效保障飞机刚接地机轮未充分起转实施刹车造成的爆胎。
2、公开号cn 114670798 a公开了一种飞机刹车系统的接地保护控制方法,该发明判断防滑刹车控制盒的对前轮载状态进行判断,判断出的前轮载状态或采集的左、右轮速信号,判断飞机当前的空地状态,判断是否输出刹车压力。该发明中并未考虑前轮载状态的误指示,会造成机轮未充分起转输出刹车压力导致机轮抱死等。
3、公开号cn105620455a公开了一种飞机刹车系统及其接地保护的控制方法,该发明通过防滑控制盒低速探测单元逻辑运算确定飞机高低速状态信号,防滑控制盒采集左右主起落架主机轮轮速信号,处理转换后作为模拟飞机速度的基准速度电压信号,防滑控制盒低速探测单元给出飞机高/低速状态。该发明通过机轮速度确定飞机高速和低速状态,刹车可用性较低。
4、目前我国飞机刹车系统中常用的防滑保护控制逻辑为:刹车控制器接收左、右轮载总线信号、左、右轮载硬线信号,当4个轮载信号均在地面状态或者左右轮速均超过刹车控制器判断飞机已接地并且机轮充分转动,可以执行刹车功能,刹车控制器输出与刹车指令信号相对应的伺服阀控制信号;否则,即使脚蹬踩下,刹车控制器输出的刹车指令为0,无刹车。已此防止飞机刚着陆时,机轮未充分起转,如果有脚蹬刹车指令造成的机轮抱死。上述的判断中,当飞机在低速滑行阶段,如果4个轮载中的任一轮载信号误指示或者发生跳变,就丧失了刹车功能,刹车可用性较低。
技术实现思路
1、为解决现有技术中刹车系统低速滑行时由于轮载跳变或者误指示造成的完全丧失刹车的问题,本发明提出了一种飞机机轮刹车系统防滑保护控制方法。
2、本发明的具体过程是:
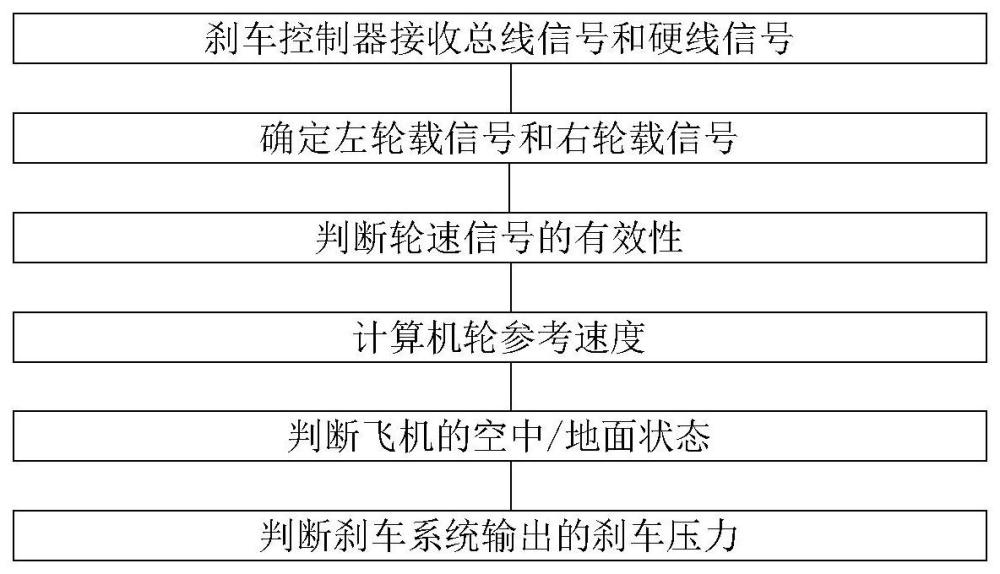
3、步骤1,刹车控制器接收总线信号和硬线信号:
4、所述的总线信号包括左轮载总线信号、右轮载总线信号、空速信号和飞机减速率以及各个信号的有效判断位。所述的硬线信号包括左轮载硬线信号、右轮载硬线信号。
5、所述左轮载总线信号、右轮载总线信号、空速信号和飞机减速率的有效判断位为0或1;当左轮载总线信号、右轮载总线信号、空速信号和飞机减速率的有效判断位为0时,该左轮载总线信号、右轮载总线信号、空速信号和飞机减速率信号无效;当左轮载总线信号、右轮载总线信号、空速信号和飞机减速率的有效判断位为1时,该左轮载总线信号、右轮载总线信号、空速信号和飞机减速率信号有效。
6、所述左轮载总线信号和左轮载硬线信号来自于左起落架的两个不同的轮载传感器;右轮载总线信号和右轮载硬线信号来自于右起落架的两个不同的轮载传感器。
7、所述刹车控制器接收起落架控制单元的左轮载硬线信号、右轮载硬线信号,通过总线接收数据处理模块发送的左轮载总线信号、右轮载总线信号。
8、步骤2,确定左轮载信号和右轮载信号:
9、当左轮载总线信号和右轮载总线信号全部有效时,则左轮载信号为左轮载总线信号,右轮载信号为右轮载总线信号;当左轮载总线信号和右轮载总线信号中的任一信号为无效时,则左轮载信号为左轮载硬线信号,右轮载信号为右轮载硬线信号。
10、步骤3,判断轮速信号的有效性:
11、刹车控制器分别接收安装在主机轮上的各轮速传感器检测的机轮速度信号,并检测轮速传感器的开路故障、短路故障和超范围故障。
12、当检测到有任一所述开路故障、短路故障或者超范围故障时,判断机轮速度信号无效;当未检测到任何所述开路故障、短路故障以及超范围故障时,判断机轮速度信号有效。
13、步骤4,计算机轮参考速度:
14、刹车控制器通过机轮速度和飞机减速率计算机轮参考速度。当机轮速度>机轮参考速度时,以机轮速度为机轮参考速度;当机轮速度≤机轮参考速度时,机轮参考速度以飞机减速率减少。
15、所述机轮参考速度计算公式为:
16、
17、式中,vr为当前控制周期的机轮参考速度,a为飞机减速率,为上一控制周期的机轮参考速度,vw为机轮速度。
18、当机轮速度信号无效时,设置机轮速度为0,机轮参考速度为0。
19、当飞机减速率信号无效时,设置飞机减速率为4。
20、当空速信号无效时,设置空速信号为0。
21、步骤5,判断飞机的空中/地面状态的方式包括:
22、ⅰ当左轮载信号和右轮载信号均处于地面时,判断飞机在地面机轮未充分起转,对飞机在地面机轮未充分起转状态进行计时;
23、ⅱ判断飞机在地面机轮未充分起转状态的持续时间是否大于轮载持续时间门限;
24、ⅲ在判断出计时大于轮载持续时间门限,则判断出飞机在地面机轮充分起转状态;
25、ⅳ在判断出计时未大于轮载持续时间门限,且在实时判断出左机轮参考速度和右机轮参考速度中有任一轮速小于机轮起转速度门限时,判断出飞机在地面机轮未充分起转;
26、ⅴ当左轮载信号和右轮载信号不一致时,如果空速信号小于空速门限,判断出飞机在地面且机轮充分起转;
27、ⅵ当左机轮参考速度和右机轮参考速度均大于机轮起转速度门限时判断飞机在地面机轮未充分起转,对飞机在地面机轮未充分起转状态进行计时;
28、ⅶ判断飞机在地面机轮未充分起转状态是否大于速度持续时间门限;
29、ⅷ在判断出计时大于速度持续时间门限,则判断飞机在地面机轮充分起转状态;
30、ⅸ在判断出计时未大于速度持续时间门限,且左轮载信号和右轮载信号不一致,且空速信号大于等于空速门限时,判断出飞机在地面且机轮未充分起转;
31、ⅹ当判断左轮载信号和右轮载信号均处于空中时,判断飞机在空中状态。
32、步骤6,判断刹车系统输出的刹车压力;
33、该实现方式中,执行防滑保护控制策略,包括:
34、在判断出飞机在地面机轮充分起转状态时,允许输出刹车系统的最大刹车压力;
35、在判断出飞机在空中状态或者飞机在地面机轮未充分起转时,刹车系统输出的刹车压力为0。
36、至此,完成飞机机轮刹车系统防滑保护的控制过程。
37、与现有技术相比较,本发明取得的有益效果为:
38、本发明优化了传统的防滑保护控制逻辑如下:如果总线轮载信号无效,如总线通讯故障、传输错误等造成总线信号无效,刹车控制器通过硬线轮载判断是否能实施刹车;同时,刹车控制器实时通过机轮参考速度判断机轮是否充分起转,相较于使用机轮速度,该种方法能够更准确的表达机轮是否起转,防止了机轮跳变造成的误判断,提高了系统安全性1.2e-10;在左、右轮载信号不一致的时候,引入了空速信号进行判断,已避免飞机低速滑行时由于轮载跳变导致的丧失刹车功能,提升了系统的可用性12%。采用本发明实施例提供的防滑保护控制方法,通过仅更改刹车控制器的控制方法,而不需对刹车系统的其它硬件进行更改就能完成防滑保护的提升;该防滑被保护控制方法,有效避免低速滑行时轮载误指示以及跳变导致的完全丧失刹车功能的弊端;同时,提供了总线信号有效性的判断,当总线信号无效时通过硬线信号判断,提升了刹车系统的可用性;引入了机轮速度有效性判断,提高了防滑保护的准确性,有效提升了刹车系统的可用性12%。
39、本发明中,左轮载总线信号和左轮载硬线信号来源于左起落架的两个不同的轮载传感器,右轮载总线信号和右轮载硬线信号来源于右起落架的两个不同的轮载传感器。通过应用同一起落架两个不同的轮载传感器,分别通过总线和硬线进行传输,有效避免了因为一个轮载传感器故障造成的丧失刹车功能,提高了刹车系统的可用性,提升了刹车系统的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222454.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表