一种基于扑翼飞行器停歇的仿生腿爪装置
- 国知局
- 2024-08-01 06:06:48
本发明属于涉及飞行器,具体涉及基于扑翼飞行器的仿生机械腿爪装置。
背景技术:
1、现有的基于扑翼飞行器停歇的仿生腿爪装置较少,大多数用于飞行器的腿爪都是基于旋翼飞行器的。然而扑翼飞行器和旋翼飞行器无论是空气动力学还是飞行特点都不同,旋翼飞行器的腿爪装置并不适用于扑翼飞行器。在少量的扑翼飞行器仿生腿爪装置中,仍然存在着结构复杂,质量大,仿生性差等特点。
2、由于扑翼飞行器受飞行原理和电池容量的限制,难以实现长周期任务执行,这限制了扑翼飞行器在侦测、环境监测等任务中的应用。如果飞行器能像鸟类一样,同时具有飞行、栖息、抓取功能,则能够解决上述问题。当处于高机动侦察任务状态时,飞行器充分利用高空优势,对目标进行侦察;当需要长时间监视目标时则可以栖息到树枝上,目前许多飞行器栖息后仍然需要电机持续提供抓紧力来保证飞行器不掉落,因此可以做到扑翼飞行器栖息后无需消耗电能保持飞行器的位姿,实现低能耗待机侦察是必要的。同时,许多飞行器抓取都需要电机驱动,消耗电量的同时也不够迅速。因此,探索一种依靠自身抓取冲击力即可完成快速抓取动作的飞行器腿爪机构是很有必要的。
技术实现思路
1、本发明的目的在于提供一种基于扑翼飞行器的仿生机械腿爪装置,模仿鸟类腿部爪子实现临时栖息功能,同时在栖息的过程中无需消耗能量,使飞行器的起降有了更多的可能性,从而使极大提升无人机的续航能力。
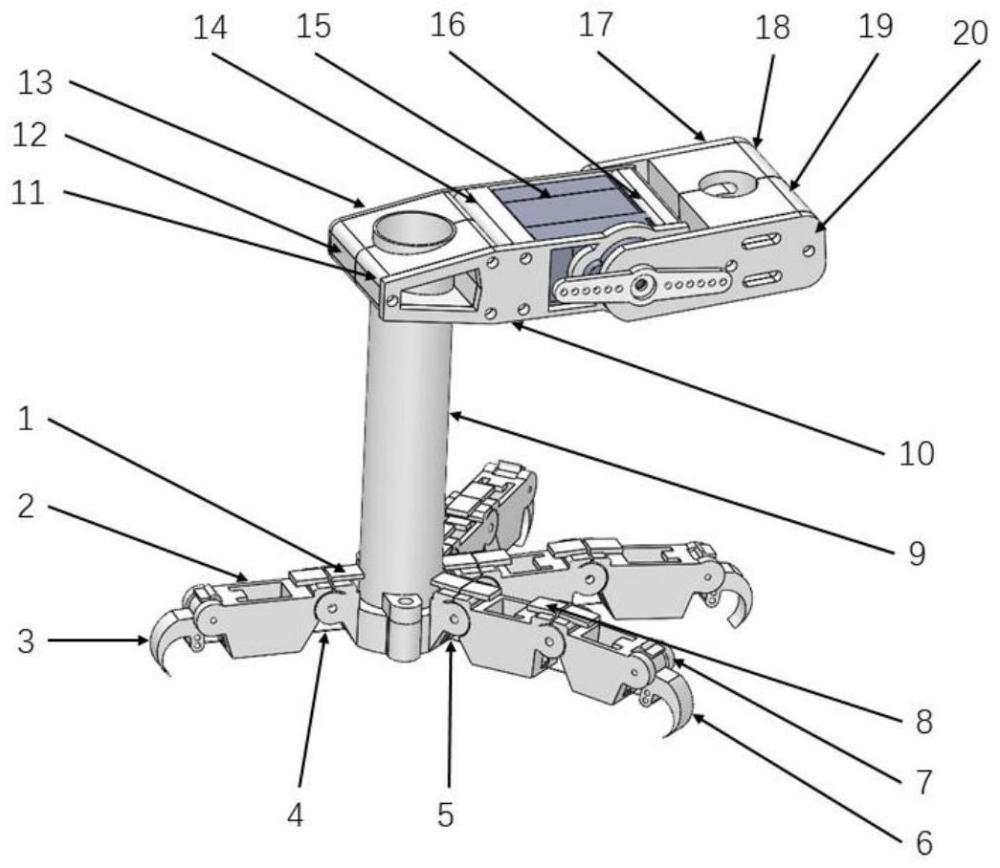
2、实现本发明目的的技术解决方案为:一种基于扑翼飞行器的仿生机械腿爪装置,所述仿生机械腿爪装包括基座、腿部机构、爪部机构和驱动模组;基座固定在腿部机构中的圆柱连杆的一端,基座连接爪部机构,驱动模组设置在腿部机构中,用于驱动爪部机构运动和驱动腿部机构运动。
3、所述爪部机构包括前勾爪部和后勾爪部,飞行器驻停时,前勾爪部和后勾爪部同时抓握维持飞行器的位姿。
4、所述每个后勾爪部包括第一爪关节;第一爪尖;第一绳索;所述第一爪关节与所述基座以转动副连接,所述第一爪关节与所述第一爪尖以转动副连接;所述第一绳索在所述基座、第一爪关节、第一爪尖的下方开口处穿过,串联整个后勾爪部。
5、所述前勾爪部包括第二爪关节;第三爪关节;所述第二爪关节与所述基座以转动副连接,所述第三爪关节与所述第二爪关节以转动副连接,所述第二爪尖与所述第三爪关节以转动副连接;第二绳索在所述基座、第二爪关节、第三爪关节、第二爪尖的下方开口处穿过,串联整个前勾爪部。
6、所述后勾爪部设置有三组,后勾爪部设置有一组,三个前勾爪部围绕基座圆周分布,分别间隔一定角度,中间的前勾爪部与后勾部爪呈180°。
7、所述腿部机构呈“l”型,所述腿部机构包括圆柱连杆、上腿部组件和下腿部组件;第二夹板、下垫块、上垫块、第三夹板、第一上夹块、第二上夹块、第四夹板;圆柱连杆一端固定在所述基座上,另一端固定连接下腿部组件的一端;下腿部组件的另一端与上腿部组件的一端转动连接且可实现角度的保持和控制,上腿部组件的另一端固定连接飞行器。
8、所述下腿部组件包括第一夹板、第一下夹块、第二下夹块、第二夹板、下垫块和上垫块;第一下夹块和第二下夹块并列设置,所述第一夹板固定在第一下夹块的侧边,所述第二夹板固定在第二下夹块的侧边,第一下夹块和第二下夹块通过第一夹板和第二夹板实现锁紧,进而实现与圆柱连杆的固定相连;所述下垫块和上垫块固定在第一下夹块和第二下夹块的上方,下垫块和上垫块用于固定舵机。
9、上腿部组件包括第三夹板、第一上夹块、第二上夹块和第四夹板;第一上夹块;第二上夹块并列设置,第三夹板设置在第一上夹块的侧边,第四夹板设置在第二上夹块的侧边,第一上夹块和第二上夹块通过第三夹板和第四夹板实现锁紧。
10、所述驱动模组分包括位姿驱动部分和抓握驱动部分;其中位姿驱动部分为舵机,舵机)固定位于所述下垫块和所述上垫块之间;舵机转动,进而带动上腿部组件和下腿部组件之间多角度,实现可以控制下腿部组件的方位角度。
11、所述抓握驱动部分包括电机,丝杆,螺母,弹簧自锁机构,电机固定在圆柱连杆内部,丝杆与所述电机输出轴固定连接;螺母设在所述丝杆上,所述弹簧一端固定在螺母,另一端固定连接自锁机构,自锁机构接第一绳索和第二绳索;自锁机构与圆柱连杆滑动连接且一端伸出所述基座外部。
12、本发明与现有技术相比,其显著优点是:
13、(1)本发明通过触发抓握的方式为机械触发,无需消耗电量。驱动方式简单可靠,重量轻、耗能小。连杆处的舵机,也可以调整仿生腿爪的抓握角度,提高了抓握的成功率。
14、(2)本发明通过利用弹簧储存使能,实现了快速抓握,使抓握更及时。同时使用弹簧做到了无需消耗电量的持久抓握,大大节省了飞行器宝贵的电量资源,提高了飞行器的续航能力,使飞行器可执行任务更加多样化。
15、(3)本发明设计模仿鸟类爪子,仿生性较好,抓握范围较大。
技术特征:1.一种基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述仿生机械腿爪装包括基座(1)、腿部机构、爪部机构和驱动模组;基座(1)固定在腿部机构中的圆柱连杆(9)的一端,基座(1)连接爪部机构,驱动模组设置在腿部机构中,用于驱动爪部机构运动和驱动腿部机构运动。
2.根据权利要求1所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述爪部机构包括前勾爪部和后勾爪部,飞行器驻停时,前勾爪部和后勾爪部同时抓握维持飞行器的位姿。
3.根据权利要求2所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述每个后勾爪部包括第一爪关节(2);第一爪尖(3);第一绳索(4);所述第一爪关节(2)与所述基座(1)1以转动副连接,所述第一爪关节(2)与所述第一爪尖(3)以转动副连接;所述第一绳索(4)在所述基座(1)、第一爪关节(2)、第一爪尖(3)的下方开口处穿过,串联整个后勾爪部。
4.根据权利要求2所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述前勾爪部包括第二爪关节(7);第三爪关节(8);所述第二爪关节(7)与所述基座(1)以转动副连接,所述第三爪关节(8)与所述第二爪关节(7)以转动副连接,所述第二爪尖6与所述第三爪关节(8)以转动副连接;第二绳索(4)在所述基座(1)、第二爪关节(7)、第三爪关节(8)、第二爪尖(6)的下方开口处穿过,串联整个前勾爪部。
5.根据权利要求2所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述后勾爪部设置有三组,后勾爪部设置有一组,三个前勾爪部围绕基座圆周分布,分别间隔一定角度,中间的前勾爪部与后勾部爪呈180°。
6.根据权利要求1所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述腿部机构呈“l”型,所述腿部机构包括圆柱连杆(9)、上腿部组件和下腿部组件;第二夹板(13)、下垫块(14)、上垫块(16)、第三夹板(17)、第一上夹块(18)、第二上夹块(19)、第四夹板(20);圆柱连杆(9)一端固定在所述基座(1)上,另一端固定连接下腿部组件的一端;下腿部组件的另一端与上腿部组件的一端转动连接且可实现角度的保持和控制,上腿部组件的另一端固定连接飞行器。
7.根据权利要求6所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述下腿部组件包括第一夹板(10)、第一下夹块(11)、第二下夹块(12)、第二夹板(13)、下垫块(14)和上垫块(16);第一下夹块(11)和第二下夹块(12)并列设置,所述第一夹板(10)固定在第一下夹块(11)的侧边,所述第二夹板(13)固定在第二下夹块(12)的侧边,第一下夹块(11)和第二下夹块(12)通过第一夹板(10)和第二夹板(13)实现锁紧,进而实现与圆柱连杆(9)的固定相连;所述下垫块(14)和上垫块(16)固定在第一下夹块(11)和第二下夹块(12)的上方,下垫块(14)和上垫块(16)用于固定舵机(15)。
8.根据权利要求7所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,上腿部组件包括第三夹板(17)、第一上夹块(18)、第二上夹块(19)和第四夹板(20;第一上夹块(18);第二上夹块(19)并列设置,第三夹板(17)设置在第一上夹块(18)的侧边,第四夹板(20设置在第二上夹块(19)的侧边,第一上夹块(18)和第二上夹块(19)通过第三夹板(17)和第四夹板(20实现锁紧。
9.根据权利要求1所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述驱动模组分包括位姿驱动部分和抓握驱动部分;
10.根据权利要求9所述的基于扑翼飞行器的仿生机械腿爪装置,其特征在于,所述抓握驱动部分包括电机(21),丝杆(22),螺母(23),弹簧(24)自锁机构(25),电机(21)固定在圆柱连杆(9)内部,丝杆(22)与所述电机(21)输出轴固定连接;螺母(23)设在所述丝杆(22)上,所述弹簧(24)一端固定在螺母(23),另一端固定连接自锁机构(25),自锁机构(25)连接第一绳索(4)和第二绳索(5);自锁机构(25)与圆柱连杆滑动连接且一端伸出所述基座(1)外部。
技术总结本发明公开了一种基于扑翼飞行器的仿生机械腿爪装置,所述仿生机械腿爪装包括基座、腿部机构、爪部机构和驱动模组;基座固定在腿部机构中的圆柱连杆的一端,基座连接爪部机构,驱动模组设置在腿部机构中,用于驱动爪部机构运动和驱动腿部机构运动。所述腿部机构所述腿部机构呈“L”型,所述腿部机构包括圆柱连杆、上腿部组件和下腿部组件;上腿部组件和下腿部组件之间可以实现角度的调节。与现有技术相比,本发明模仿鸟类腿部爪子实现临时栖息功能,同时在栖息的过程中无需消耗能量,使飞行器的起降有了更多的可能性,从而使极大提升无人机的续航能力。技术研发人员:史记,杨玉磊,范元勋,赵孝礼,谭汝健受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240722/222765.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。