一种新型仿生蝴蝶扑翼飞行器
- 国知局
- 2024-08-01 06:08:26
本技术涉及仿生扑翼飞行器,具体为一种新型仿生蝴蝶扑翼飞行器。
背景技术:
1、仿生扑翼飞行器的历史最早可追溯到古希腊,但碍于技术限制和材料限制,其大多停留在理论阶段。随着现如今科学技术的不断进步,仿生扑翼飞行器的研究蒸蒸日上。在本文中主要研究仿生蝴蝶扑翼飞行器。昆虫蝴蝶飞行时翅膀拍打角大,频率低而现有大多数小型仿生扑翼飞行器(翼展小于80cm),在扑翼机构上依旧大量使用双舵机结构的纯电路控制,缺少机械结构上的创新;或使用简单的平面四杆机构,可达到摆角有限(一般为30~40°),无法很好还原昆虫蝴蝶真实的飞行状态。我们设计了一种大拍打角、低频率、转向迅速的、易加工制造的、成本低的轻量化新型仿生蝴蝶扑翼飞行器。
技术实现思路
1、本实用新型的目的在于提供一种新型仿生蝴蝶扑翼飞行器,以解决上述背景技术中提出的问题。
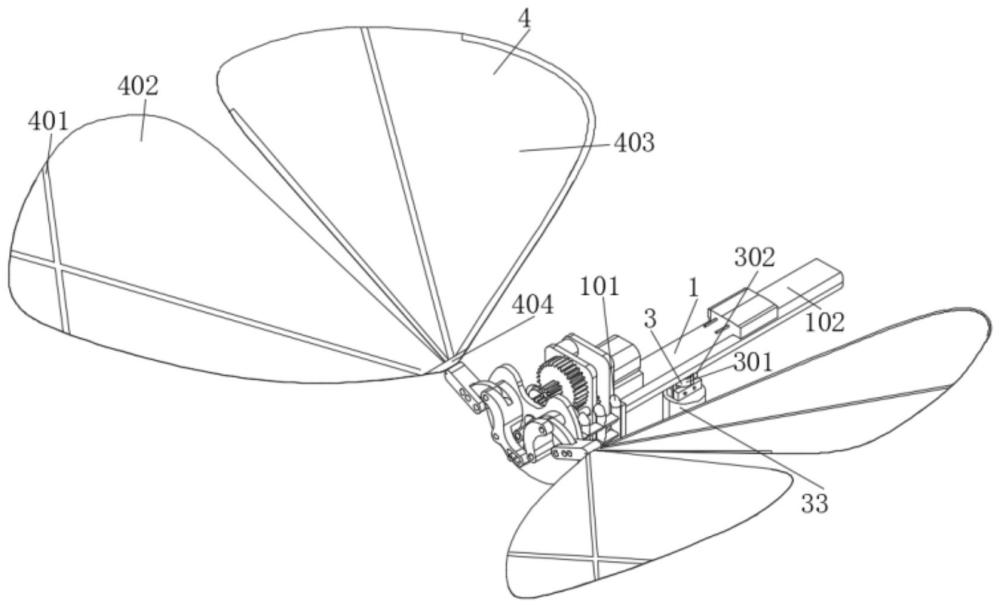
2、为实现上述目的,本实用新型提供如下技术方案:一种新型仿生蝴蝶扑翼飞行器,包括骨架、扑翼机构、转向机构、翅膀结构以及单片机控制模块,所述骨架包括保护壳和粗碳纤维杆;
3、所述扑翼机构包括带减速器的电机、曲柄滑块机构、弯杆、连杆、摆杆、定位板。
4、优选的,所述保护壳起到装载带减速器的电机和连接的作用,与其他结构连接构成整个机身,并承托单片机控制模块。
5、优选的,所述单片机控制模块带动由骨架中的保护壳中的减速器的电机带动曲柄滑块机构运动,其运动使弯杆摆动,从而使连杆摆动,最终带动摆杆摆动实现大摆角(理论最大摆角为九十度),低频率的拍打角。
6、优选的,所述定位板安装在保护壳前端,双平面五杆机构通过销钉固定在定位板上并与电机相连,当电机转动时,带动双平面五杆机构中的主动件曲柄滑块机构运动,曲柄滑块机构同步带动左右一系列的从动杆运动,最终实现摆杆的摆动。
7、优选的,所述转向机构包括电磁舵机、舵机架、重物,所述舵机架将电磁舵机竖直固定在机身上,将重物悬挂于电磁舵机上,在转向时,控制电磁舵机左右迅速转动,使重物往左右倾,从而在不影响扑翼运动的情况下,令整个飞行器重心迅速平稳的往左右倾而解决转向问题。
8、优选的,所述骨架中的粗碳纤维杆定位连接的舵机架中的电磁舵机下方连接一重物,当单片机控制电磁舵机转动时,重物随之转动,使整机重心改变,实现左右倾斜,从而完成转向动作。
9、优选的,所述翅膀结构细碳纤维棒、前翅、后翅、小碳片、主翅、副翅,所述前翅和后翅使用0.0125mm的pet塑料薄膜制成,细碳纤维棒按角度与薄膜粘连,再将前翅和后翅成一定角度粘贴在小碳片上,最后将小碳片卡紧于扑翼机构的摆杆上。
10、优选的,所述主翅和副翅由塑料制成,所述细碳纤维棒与主翅和副翅粘连、主翅和副翅一起与小碳片粘连、小碳片卡紧在摆杆上,模仿了昆虫蝴蝶翅膀整体外形,解决仿生其外形和提供升力的问题。
11、优选的,所述单片机控制模块由arduino核心控制板,2.4ghz通讯模块,舵机,带减速器的电机,航模电池,电机驱动模块以及加速度陀螺仪组成。
12、与现有技术相比,本实用新型提供了一种新型仿生蝴蝶扑翼飞行器,具备以下有益效果:
13、1、该新型仿生蝴蝶扑翼飞行器,整机多由杆类和板材类零件组成,易加工制作,也便于拆装;在符合强度和刚度条件的情况下材料主要采用塑料,实现轻量化设计。
14、2、该新型仿生蝴蝶扑翼飞行器,采用.ghz遥控器遥控,方便实时调整飞行器飞行姿态,实时性更高,连接后,遥控器可以获取飞行器的状态信息、传输指令以及接收实时的返回数据,进行遥控。
15、3、该新型仿生蝴蝶扑翼飞行器,采用电机驱动器模块与arduino beetle相连,通过pid调制来调节电机速度,改变扑翼频率。
16、4、该新型仿生蝴蝶扑翼飞行器,采用航模电池供电,其高放电率,能使飞行器在短时间内获得更大的电流输出。
17、5、该新型仿生蝴蝶扑翼飞行器,采用三轴加速度陀螺仪,确定飞行器的飞行姿态,当飞行器姿态不平稳时,加速度计经计算得出倾斜的角度,通过调整扑翼的速度和双翼倾角来实现姿态的修正。
技术特征:1.一种新型仿生蝴蝶扑翼飞行器,包括骨架(1)、扑翼机构(2)、转向机构(3)、翅膀结构(4)以及单片机控制模块,其特征在于:所述骨架(1)包括保护壳(101)和粗碳纤维杆(102);
2.根据权利要求1所述的一种新型仿生蝴蝶扑翼飞行器,其特征在于:所述单片机控制模块由arduino核心控制板,2.4ghz通讯模块,舵机,带减速器的电机(201),航模电池,电机驱动模块以及加速度陀螺仪组成。
技术总结本技术涉及仿生扑翼飞行器技术领域,且公开了一种新型仿生蝴蝶扑翼飞行器,包括骨架、扑翼机构、转向机构、翅膀结构以及单片机控制模块,所述骨架包括保护壳和粗碳纤维杆,所述扑翼机构包括带减速器的电机、曲柄滑块机构、弯杆、连杆、摆杆、定位板,所述保护壳起到装载带减速器的电机和连接的作用,与其他结构连接构成整个机身,并承托单片机控制模块,所述单片机控制模块带动由骨架中的保护壳中的减速器的电机带动曲柄滑块机构运动,其运动使弯杆摆动。该新型仿生蝴蝶扑翼飞行器,整机多由杆类和板材类零件组成,易加工制作,也便于拆装;在符合强度和刚度条件的情况下材料主要采用塑料,实现轻量化设计。技术研发人员:潘盈卉,黄晓仪,陈炳树,李彦清受保护的技术使用者:长春理工大学技术研发日:20240417技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/222821.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表