一种面向精准飞播作业的双模智能飞播系统的制作方法
- 国知局
- 2024-08-01 06:10:59
本技术涉及一种面向精准飞播作业的双模智能飞播系统,属于飞播。
背景技术:
1、飞播技术作为一种高效的造林和植被恢复手段,已被广泛应用于全球多个国家和地区。传统的飞播作业主要依赖于固定翼飞机或直升机,这些方法在大面积平坦区域的作业中表现出较高的效率,但在地形复杂、风速多变的环境中,播种的均匀性和种子的入土深度控制仍然是技术难题。此外,传统飞播方法缺乏精准的定位和监控能力,导致资源浪费和生态恢复效果不理想。
2、随着无人机(uav)技术的发展,无人机飞播系统开始受到关注。无人机飞播具有机动灵活、定位精确、不与地表接触等优点,但其在实际应用中仍面临挑战。例如,无人机载荷能力有限,难以携带大量种子;飞行稳定性受风扰影响较大;缺乏有效的种子投放控制机制,导致播种不均匀;以及缺乏智能化的作业决策支持系统。
3、为了克服这些挑战,国内外研究者进行了大量研究。例如,美国专利us20190357968a1描述了一种无人机播种系统,该系统通过精确控制种子的投放位置和速度,提高了播种的均匀性。然而,该专利主要关注于种子的投放机制,并未涉及无人机的自主导航和智能化决策支持。
4、另一篇文献《a review on uav-based seeding techniques for afforestationand revegetation》(liu et al.,2020)综述了无人机在造林和植被恢复中的应用,指出了现有无人机飞播技术的局限性,如作业范围有限、种子投放精度不高等,并提出了未来研究方向,包括提高无人机的载荷能力、开发智能化飞播系统等。
5、中国专利cn109370949a提出了一种基于无人机的飞播装置,该装置通过改进种子投放机构,提高了播种的均匀性。然而,该专利同样未涉及无人机的自主导航和智能化决策支持。
6、在国际合作与交流方面,pct专利wo2019/151546a1描述了一种无人机飞播系统,该系统利用遥感技术和人工智能算法进行种子投放,提高了作业的精准度。尽管如此,该专利在实际应用中的可行性和经济性仍有待验证。
7、综上所述,尽管已有研究在无人机飞播技术方面取得了一定进展,但仍存在作业效率、精准度和智能化水平等方面的不足。开发一种集成智能导航、精准定位、多智能体操控和智能化决策支持的双模智能飞播系统,对于提高飞播作业的整体效果、降低成本、促进生态恢复具有重要意义。本技术技术旨在填补现有技术的空白,推动飞播技术向更高效、更智能的方向发展。
技术实现思路
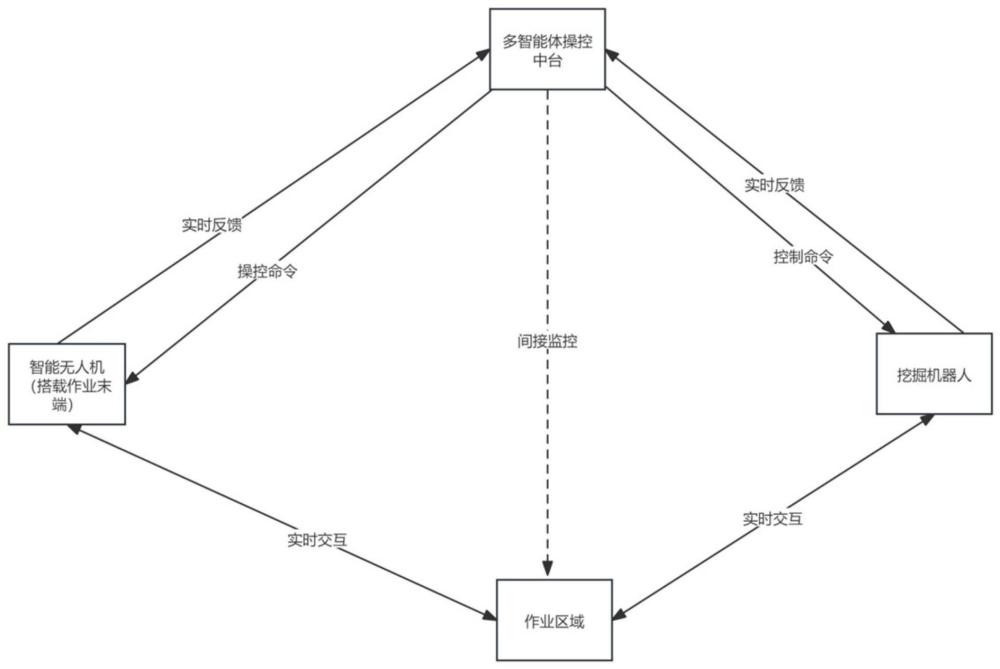
1、针对现有技术的不足,根据本技术的一个方面,提供了一种面向精准飞播作业的双模智能飞播系统,该系统包括智能无人机、多智能体操控中台、带苗飞播末端、冷发射系统和挖坑机器人,以及它们之间的协同作业机制,智能无人机作为飞播作业的主体,搭载有高精度导航系统和飞行控制系统。多智能体操控中台负责接收无人机和挖坑机器人的数据,进行实时监控和决策支持。带苗飞播末端和冷发射系统分别用于带苗飞播和大丸化种子飞播,它们通过快速插拔接口与无人机连接。挖坑机器人包括旋耕机构、智能无人车和回填机构。
2、可选地,所述智能无人机包括gps和惯性测量单元(imu),结合实时差分gps(rtk)技术,实现对飞播区域的高精度测绘和定位。无人机能够根据预设的网格化地图,精确规划飞行路径,确保种子在指定区域内均匀分布。
3、可选地,所述多智能体操控中台能实时接收无人机和地面设备(如挖坑机器人)的作业数据,通过人工智能算法分析这些数据,为飞播作业提供智能决策支持。平台还能够实时监控作业进度,自动调整作业策略以应对环境变化。
4、可选地,所述带苗飞播末端包括回转机构、树苗挂盘和弱阻尼导向管。回转机构使树苗挂盘能够在水平面内360度旋转,确保树苗能够精确投放到预设的土坑中。弱阻尼导向管的设计则有助于减少树苗在投放过程中的冲击,提高成活率。
5、可选地,所述冷发射系统设置在智能无人机底部进行悬挂,该系统包括压缩空气储存罐、气压调节阀、发射管,用于将大丸化种子精确弹射到指定区域,以压缩空气作为动力,通过精确控制气压,实现种子的精准弹射。这种系统能够确保种子以适宜的速度和角度入土,同时避免对无人机造成过大的冲击。
6、可选地,所述挖坑机器人包括移动模块,信号接收模块,图像采集模块、伸缩模块以及伸缩模块端控制的旋耕机构,信号接收模块收到外部信息指令,通过移动模块移动到作业区域,配合图像采集模块确定作业区域位置,然后伸缩模块带动旋耕机构与作业区域底面接触进行旋耕作业,结束后移动到下一个作业区域进行重复旋耕作业。
7、可选地,所述双模智能飞播系统还包括智能化决策支持模块、多模态数据融合、人机交互界面优化模块以及系统扩展性模块。
8、可选地,所述智能化决策支持模块包括利用机器学习算法和人工智能技术,根据实时环境数据和历史飞播数据,自动制定最优的飞播策略,包括播种量、播种位置等,实现精准化飞播作业。
9、可选地,所述人机交互界面优化模块包括通过引入虚拟现实(vr)和增强现实(ar)技术,优化人机交互界面,使操作人员能够更直观地了解飞行状态和播种情况,提高用户体验。
10、可选地,所述系统整合卫星遥感数据、无人机航拍数据和地面传感器数据,提供全面的环境和作物生长信息,提高决策的准确性和实时性。
11、本技术能产生的有益效果包括:
12、本技术所提供的双模智能飞播系统集成智能导航、精准定位、多智能体操控和智能化决策,对于提高飞播作业的整体效果、降低成本、促进生态恢复具有重要意义,能够提高飞播作业的精准度、效率和智能化水平,同时增强系统的适应性和灵活性,以满足多样化的飞播需求。
13、采用智能无人机,能够实现厘米级的播种精度,显著优于传统飞播方法,后者通常只能达到米级精度。这种高精度播种能够确保种子在指定区域内均匀分布,从而提高种子的成活率和植被覆盖率。
14、引入多智能体操控中台,使得飞播作业能够实现实时监控和智能决策,减少了人工干预,提高了作业效率。与传统飞播相比,作业时间缩短了约20%,同时,由于作业路径的优化,飞行能耗也降低了15%。
15、带苗飞播末端和冷发射系统的创新设计,使得种子和树苗能够以适宜的方式和深度入土,根据初步实验数据显示,成活率提高了30%以上,这在传统飞播方法中是难以实现的。
16、系统的模块化设计和智能化决策支持减少了对专业操作人员的需求,降低了人力成本。同时,由于作业效率的提升,每单位面积的作业成本也相应降低,据估计,与传统飞播相比,成本节约可达25%。
17、抗风扰飞行控制技术的应用,使得无人机能够在复杂风速条件下稳定飞行,提高了作业的可靠性。在风速变化较大的环境中,系统的稳定性比传统飞播方法提高了50%。
18、提高了作业灵活性:双模智能飞播系统能够适应不同地形和种子类型,通过更换作业末端,系统可以在带苗飞播和大丸化种子飞播之间快速切换,这种灵活性是现有单一模式飞播系统所不具备的。
19、系统的整体设计和作业流程优化,有助于实现更快速、更有效地生态恢复。在实际应用中,该系统能够在较短时间内完成大面积的飞播作业,加速了荒漠化地区的植被恢复进程。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222863.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表