一种无人机多旋翼组装装置的制作方法
- 国知局
- 2024-08-01 06:12:27
本发明涉及无人机组装,尤其涉及一种无人机多旋翼组装装置。
背景技术:
1、随着科技的发展,旋翼无人机在军用和民用领域受到了越来越多的关注,并开展了广泛的应用。旋翼无人机在军事应用上,主要是作为靶机和完成军事侦查工作;在民用领域中,最常见的是旋翼无人机机型,它主要应用于应急救灾、科学探测、农林植保以及商业航拍中。
2、现有的无人机多旋翼组装装置,是将旋翼臂放置在水平座上后,推动水平座移动,使旋翼臂与机身对接,之后再将螺旋桨安装在旋翼臂上,但是由于现有装置无法在组装前对螺旋桨进行称重,可能出现螺旋桨重量不一致的情况,导致影响无人机的飞行性能,且水平座的方向和位置不同,在放置旋翼臂时,需要工作人员移动将旋翼臂分别放置在水平座上,较为不便。
3、因此,现在研发出了一种能够对螺旋桨进行送料,并确保螺旋桨重量一致,避免影响无人机飞行性能,且能够对旋翼臂进行定点放置,提高组装效率的无人机多旋翼组装装置。
技术实现思路
1、为了克服现有的无人机多旋翼组装装置,无法在组装前对螺旋桨进行称重,可能出现螺旋桨重量不一致的情况,且放置旋翼臂时,需要工作人员移动将旋翼臂分别放置在水平座上的缺点,本发明提供一种能够对螺旋桨进行送料,并确保螺旋桨重量一致,避免影响无人机飞行性能,且能够对旋翼臂进行定点放置,提高组装效率的无人机多旋翼组装装置。
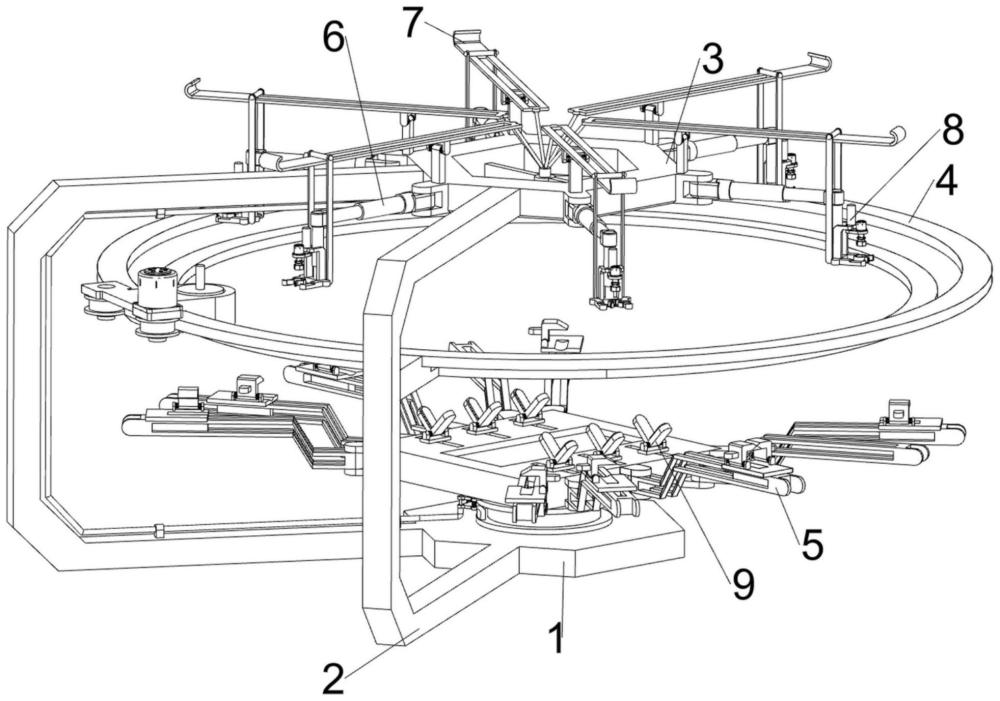
2、本发明的技术实施方案是:一种无人机多旋翼组装装置,包括有安装架、第一连接杆、第一固定架、送料机构和持平机构,安装架右部连接有前后两个第一连接杆,第一连接杆上部之间连接有第一固定架,第一连接杆之间设有能够对螺旋桨进行送料的送料机构,安装架上设有能够方便对旋翼臂进行放置,并确保旋翼臂水平的持平机构。
3、可选地,送料机构包括有固定块、第一水平滑轨、第二水平滑轨、第一滑动座、第一电机、滑动件、转轮、辅助轮和计量秤,后部第一连接杆上部连接有固定块,固定块上部连接有第一水平滑轨,固定块下部连接有第二水平滑轨,第一水平滑轨上滑动式连接有第一滑动座,第一滑动座与第二水平滑轨接触,第一滑动座后部上侧连接有第一电机,第一滑动座上滑动式连接有滑动件,第一电机输出轴上连接有转轮,转轮与第一滑动座转动式连接,第一滑动座前部转动式连接有辅助轮,辅助轮和转轮均与第一水平滑轨接触配合,第二水平滑轨上设有计量秤,滑动件位于计量秤上侧,计量秤与第一电机通过电线连接,无人机旋翼放置在滑动件上后,通过滑动件与计量秤接触,使得计量秤对旋翼进行称重,当旋翼称重为设定数值时,计量秤控制第一电机启动,带动转轮旋转,辅助轮旋转,使得第一滑动座在第一水平滑轨和第二水平滑轨上移动,带动滑动件移动,将旋翼传送至指定组装区域。
4、可选地,滑动件上侧均设有限位杆。
5、可选地,持平机构包括有转动杆、转盘、第三水平滑轨、第二滑动座、第一转动板和第一扭簧,安装架中部上侧转动式连接有转动杆,转动杆上侧连接有转盘,转盘上连接有多个第三水平滑轨,第三水平滑轨上均滑动式连接有第二滑动座,第二滑动座上均转动式连接有第一转动板,第一转动板均与相连接的第二滑动座之间连接有多个第一扭簧,根据机身旋翼臂组装需求,转动转盘,带动转动杆旋转,使相应位置的第三水平滑轨移动至旋翼臂放置位置,随后向外转动第一转动板,第一扭簧发生形变,将旋翼臂放置在第二滑动座上。
6、可选地,还包括有取料机构,取料机构包括有第一气缸、第二气缸、托架、夹具和第二扭簧,第一固定架上转动式连接有多个第一气缸,第一气缸伸缩端上均连接有第二气缸,第二气缸伸缩端上均连接有托架,托架上均转动式连接有多个夹具,夹具均与相连接的托架之间连接有第二扭簧,启动第一气缸,推动第二气缸向外移动,带动托架向外移动,使得旋翼与夹具接触,挤压夹具相互远离,通过第二扭簧的作用力,使得夹具对旋翼进行夹持。
7、可选地,还包括有控制机构,控制机构包括有第二连接杆、第二转动板、第一固定件、第三扭簧、拉线、总线、第二固定架、连接线、第二固定件、滑动板和弹簧,托架内侧均连接有第二连接杆,第一固定架上侧连接有多个第一固定件,第一固定件上均转动式连接有第二转动板,第二转动板均与相邻的第二连接杆接触,第二转动板均与相连接的第一固定件之间连接有多个第三扭簧,第二转动板上均连接有拉线,拉线之间连接有总线,第一固定架内部连接有第二固定架,总线穿过第二固定架,总线下侧连接有连接线,连接线穿过前部第一连接杆,安装架中部上侧连接有第二固定件,第二固定件上滑动式连接有滑动板,滑动板位于转动杆上侧,滑动板与连接线连接,滑动板与第二固定件之间连接有弹簧,托架向下移动的同时,带动第二连接杆向下移动,使得第二连接杆带动第二转动板在第一固定件上向下旋转,第三扭簧发生形变,将拉线进行向上拉动,使得总线在第二固定架向上移动,进而拉动连接线移动,使得滑动板向下移动与转动杆接触。
8、可选地,还包括有拧螺机构,拧螺机构包括有第三固定架、第三气缸、第二电机和螺套,托架上侧均连接有第三固定架,第三固定架上均连接有第三气缸,第三气缸伸缩端上均连接有第二电机,第二电机输出轴上均连接有螺套,启动第三固定架上的第三气缸,推动第二电机向下移动,使得螺套与螺栓对接,再启动第二电机,带动螺套旋转将螺栓进行旋紧。
9、可选地,还包括有夹持机构,夹持机构包括有第三滑动座、第四扭簧和第三转动板,转盘上侧滑动式连接有多个第三滑动座,第三滑动座上均转动式连接有第三转动板,第三转动板均与相连接的第三滑动座之间连接有第四扭簧,根据机身支架位置,滑动调节第三滑动座的位置,机身放置在转盘上后,机身支架挤压第三转动板向内旋转,第四扭簧发生形变,使得第三转动板对机身支架进行夹持。
10、与现有技术相比,本发明具有如下优点:1、本发明通过计量秤对旋翼进行称重,当旋翼称重为设定数值时,第一电机启动,将旋翼传送至指定组装区域,从而能够对螺旋桨进行送料,并确保螺旋桨重量一致,避免影响无人机飞行性能;再通过转动转盘,使相应位置的第三水平滑轨移动至旋翼臂放置位置,从而能够对旋翼臂进行定点放置,提高组装效率。
11、2、本发明通过夹具对旋翼进行夹持,之后启动第二气缸和第一气缸,使得旋翼脱离滑动件移动至第二滑动座上方,再启动第二气缸,使托架向下移动,达到了能够自动使旋翼与旋翼臂对接,节省人力并提高组装效率的效果。
12、3、本发明通过托架向下移动的同时,带动第二连接杆向下移动,使得第二转动板向下旋转,将拉线进行向上拉动,进而拉动连接线移动,使得滑动板向下移动与转动杆接触,达到了能够对转盘进行定位,避免在组装旋翼和旋翼臂时转盘发生移动的效果。
13、4、本发明通过启动第三固定架上的第三气缸,推动第二电机向下移动,使得螺套与螺栓对接,再启动第二电机,带动螺套旋转将螺栓进行旋紧,达到了能够自动将螺栓旋紧在旋翼和旋翼臂之间,节省人力,提高旋翼和旋翼臂组装效率的效果。
14、5、本发明通过根据机身支架位置,滑动调节第三滑动座的位置,机身放置在转盘上后,机身支架挤压第三转动板向内旋转,第四扭簧发生形变,使得第三转动板对机身支架进行夹持,能够将机身固定在转盘上,避免转盘旋转时机身发生移动。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222911.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表