一种可控制飞行姿态的农业无人机的制作方法
- 国知局
- 2024-08-01 06:14:29
本发明涉及农业无人机领域,具体而言,涉及一种可控制飞行姿态的农业无人机。
背景技术:
1、无人机可以为农民提供三种类型的详细信息;第一种,从空中观察作物,帮助农民发现灌溉问题、土壤问题,甚至还能发现肉眼无法发现的虫害和菌害;第二,空中的摄像机可以提供多层次的图片,既可以采集到普通的视觉光谱照片,也能拍摄红外线照片,帮助农民发现肉眼无法看到的作物健康问题;第三,无人机每周、每天甚至每小时都可以飞一次,可以提供按时间排序的动画,演示作物的生长变化,为更好的作物管理提供机会或者发现问题。这是数据驱动农业发展趋势的一部分。
2、目前,现有的农业无人机在进行农药喷洒作业时,由于无人机底部安装有农药存放罐,当无人机在进行拐弯飞行时,由于机体的倾斜会导致农药存放罐内部液体农药产生倾斜,导致整个无人机的重心无法维持平飞状态时的重心,导致人员难以控制无人机的飞行姿态,此时,需要对农药存放罐内的重心进行改变,使得无人机在拐弯飞行的重心与平飞状态相同,才能便于人员对无人机的姿态进行有效的控制。
3、如何发明一种可控制飞行姿态的农业无人机来改善这些问题,成为了本领域技术人员亟待解决的问题。
技术实现思路
1、为了弥补以上不足,本发明提供了一种可控制飞行姿态的农业无人机,旨在改善无人机在拐弯时,农药存放罐内农药导致无人机的重心与平飞时重心不同导致难以控制姿态的问题。
2、本发明是这样实现的:
3、本发明提供一种可控制飞行姿态的农业无人机,包括:
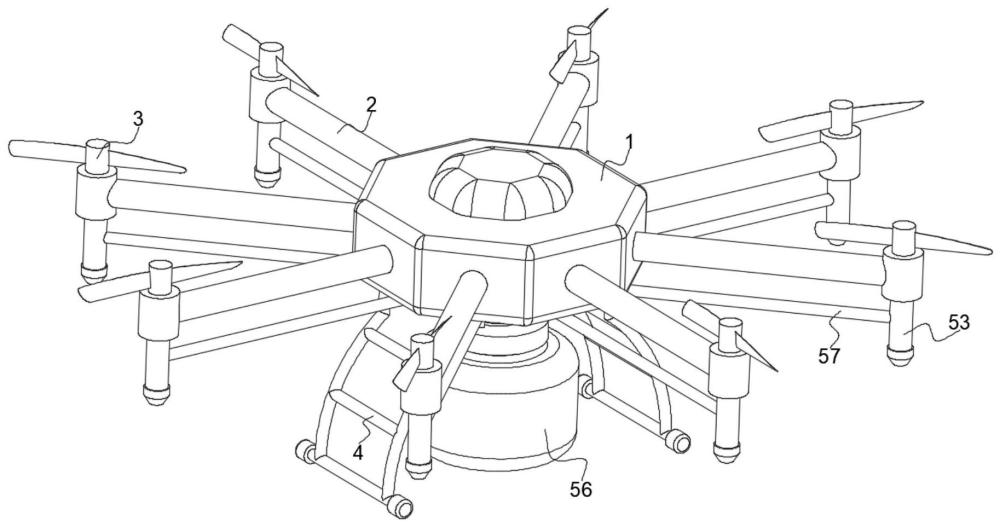
4、机体,机体的外侧壁固定连接有悬架,悬架远离机体的一端顶部安装有旋翼,机体的底部固定连接有支腿;
5、喷洒机构,喷洒机构安装在机体的底部中部位置,喷洒机构用于对农药进行喷洒操作;
6、浮调机构,浮调机构安装在喷洒机构的内部,浮调机构由喷洒机构内的农药浮力进行驱动;
7、混合机构,混合机构安装在浮调机构上,混合机构用于对农药进行进一步搅拌混合,保证喷洒农药的均匀性;
8、开关机构,开关机构安装在浮调机构的内部,开关机构用于在无人机倾斜程度较大或农药喷洒完全时进行电路接通报警。
9、优选的,喷洒机构包括泵体、分水环、喷头、抽液管、连接罩、存药罐和喷管;泵体的顶部与分水环的底部中部位置固定连接,分水环的外侧壁与喷管的一端固定连接,喷管远离分水环的一端与喷头的外侧壁固定连接,抽液管的顶部与泵体的底部固定连接,连接罩的顶部与泵体的底部固定连接,存药罐的顶部外侧壁与连接罩的内侧壁通过螺纹相连接。
10、优选的,浮调机构包括连接板、连接架、滑槽、浮板和拉绳;连接板的顶部与连接架的底部固定连接,滑槽开设在连接架的顶部,浮板的底部外侧壁与滑槽的内侧壁滑动连接,拉绳的一端与浮板的底部中部位置固定连接,拉绳的外侧壁与滑槽的内侧壁滑动连接。
11、优选的,混合机构包括套板、混合轴、配重球、连接杆和复位弹簧;套板的相向侧与混合轴的端部固定连接,混合轴的相向端与配重球的外侧壁固定连接,连接杆的外侧壁与混合轴的内侧壁通过螺纹相连接,且螺纹的螺纹升角大于连接杆与混合轴的摩擦角,从而取消螺纹的自锁效应,连接杆的外侧壁与套板滑动连接,复位弹簧套设在连接杆的外侧壁上,复位弹簧的一端与套板的一侧固定连接。
12、优选的,开关机构包括套环、推杆、电极柱和连接弹簧;套环的内侧壁与推杆的外侧壁滑动连接且相互贴合,推杆的一端与连接弹簧的一端固定连接,电极柱正对推杆的中部位置设置,连接弹簧套设在电极柱的外侧壁上。
13、优选的,分水环的顶部与机体的底部中部位置固定连接,喷头的顶部固定连接在悬架正对旋翼的底部位置,连接板的相向侧与抽液管的外侧壁固定连接。
14、优选的,拉绳远离浮板的一端与套板的一端固定连接,连接杆的端部与连接板的内部固定连接,复位弹簧远离套板的一端与连接板的内部固定连接,套板的外侧壁与连接板的内侧壁滑动连接,滑槽的底部设置有磁性块。
15、优选的,套环远离推杆的一端与连接板的内侧壁固定连接,推杆正对套板的一侧设置,连接弹簧远离推杆的一端与连接板的内侧壁固定连接。
16、本发明的有益效果是:
17、1.本发明提出的一种可控制飞行姿态的农业无人机,在现有的存药罐内增加了能够根据浮力变化发生位置变化的浮调机构,使得浮调机构能够根据在无人机进行飞行时,药液的流动状态变化导致的存药罐内的浮力不同,根据不同位置的药液浮力使得浮调机构能够改变不同位置的混合机构处于不同的状态,从而通过浮调机构的位置以及混合机构的位置相结合,使得浮调机构和混合机构的重心向前,抵消药液流动变化时药液靠后的重心,使得整个机体的重心与水平飞行时重心能够处于相同位置,从而提高了无人机的稳定性,便于操作人员对无人机姿态的控制。
18、2.本发明提出的一种可控制飞行姿态的农业无人机,当无人机飞行速度过快或者无人机升空后风速超过无人机飞行的最大允许风速时,此时无人机的姿态将处于较为倾斜的状态,将会导致存药罐内部的浮调机构处于不同的状态,而浮调机构将会通过混合机构触发开关机构工作,使得开关机构接通报警电路,此时报警电路对操作人员进行提示,使得操作人员降低飞行速度或者立即将无人机收回,并且还能够根据开关机构的工作状态,检测到存药罐内部的药液是否喷洒完全,防止了由于飞行过快或者风速过大,导致无人机无法控制出现损坏,还实现了对人员的提示,防止无人机做无用功,节约了资源,便于人员使用。
技术特征:1.一种可控制飞行姿态的农业无人机,其特征在于,包括:
2.根据权利要求1所述的一种可控制飞行姿态的农业无人机,其特征在于,所述喷洒机构(5)包括泵体(51)、分水环(52)、喷头(53)、抽液管(54)、连接罩(55)、存药罐(56)和喷管(57);所述泵体(51)的顶部与分水环(52)的底部中部位置固定连接,所述分水环(52)的外侧壁与喷管(57)的一端固定连接,所述喷管(57)远离分水环(52)的一端与喷头(53)的外侧壁固定连接,所述抽液管(54)的顶部与泵体(51)的底部固定连接,所述连接罩(55)的顶部与泵体(51)的底部固定连接,所述存药罐(56)的顶部外侧壁与连接罩(55)的内侧壁通过螺纹相连接。
3.根据权利要求2所述的一种可控制飞行姿态的农业无人机,其特征在于,所述浮调机构(6)包括连接板(61)、连接架(62)、滑槽(63)、浮板(64)和拉绳(65);所述连接板(61)的顶部与连接架(62)的底部固定连接,所述滑槽(63)开设在连接架(62)的顶部,所述浮板(64)的底部外侧壁与滑槽(63)的内侧壁滑动连接,所述拉绳(65)的一端与浮板(64)的底部中部位置固定连接,所述拉绳(65)的外侧壁与滑槽(63)的内侧壁滑动连接。
4.根据权利要求3所述的一种可控制飞行姿态的农业无人机,其特征在于,所述混合机构(7)包括套板(71)、混合轴(72)、配重球(73)、连接杆(74)和复位弹簧(75);所述套板(71)的相向侧与混合轴(72)的端部固定连接,所述混合轴(72)的相向端与配重球(73)的外侧壁固定连接,所述连接杆(74)的外侧壁与混合轴(72)的内侧壁通过螺纹相连接,且螺纹的螺纹升角大于连接杆(74)与混合轴(72)的摩擦角,从而取消螺纹的自锁效应,所述连接杆(74)的外侧壁与套板(71)滑动连接,所述复位弹簧(75)套设在连接杆(74)的外侧壁上,所述复位弹簧(75)的一端与套板(71)的一侧固定连接。
5.根据权利要求4所述的一种可控制飞行姿态的农业无人机,其特征在于,所述开关机构(8)包括套环(81)、推杆(82)、电极柱(83)和连接弹簧(84);所述套环(81)的内侧壁与推杆(82)的外侧壁滑动连接且相互贴合,所述推杆(82)的一端与连接弹簧(84)的一端固定连接,所述电极柱(83)正对推杆(82)的中部位置设置,所述连接弹簧(84)套设在电极柱(83)的外侧壁上。
6.根据权利要求3所述的一种可控制飞行姿态的农业无人机,其特征在于,所述分水环(52)的顶部与机体(1)的底部中部位置固定连接,所述喷头(53)的顶部固定连接在悬架(2)正对旋翼(3)的底部位置,所述连接板(61)的相向侧与抽液管(54)的外侧壁固定连接。
7.根据权利要求4所述的一种可控制飞行姿态的农业无人机,其特征在于,所述拉绳(65)远离浮板(64)的一端与套板(71)的一端固定连接,所述连接杆(74)的端部与连接板(61)的内部固定连接,所述复位弹簧(75)远离套板(71)的一端与连接板(61)的内部固定连接,所述套板(71)的外侧壁与连接板(61)的内侧壁滑动连接,所述滑槽(63)的底部设置有磁性块。
8.根据权利要求5所述的一种可控制飞行姿态的农业无人机,其特征在于,所述套环(81)远离推杆(82)的一端与连接板(61)的内侧壁固定连接,所述推杆(82)正对套板(71)的一侧设置,所述连接弹簧(84)远离推杆(82)的一端与连接板(61)的内侧壁固定连接。
技术总结本发明提供了一种可控制飞行姿态的农业无人机,属于农业无人机技术领域。包括:机体;喷洒机构;浮调机构;混合机构。该发明提出的一种可控制飞行姿态的农业无人机,在现有的存药罐内增加了能够根据浮力变化发生位置变化的浮调机构,使得浮调机构能够根据在无人机进行飞行时,药液的流动状态变化导致的存药罐内的浮力不同,根据不同位置的药液浮力使得浮调机构能够改变不同位置的混合机构处于不同的状态,从而通过浮调机构的位置以及混合机构的位置相结合,使得浮调机构和混合机构的重心向前,抵消药液流动变化时药液靠后的重心,使得整个机体的重心与水平飞行时重心能够处于相同位置,提高了无人机的稳定性,便于操作人员对无人机姿态的控制。技术研发人员:邸冰受保护的技术使用者:嘉兴安行信息科技有限公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/222983.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表