串列式模块化构型多旋翼重载无人机的制作方法
- 国知局
- 2024-08-01 06:20:34
本技术涉及多旋翼重载无人机,具体为串列式模块化构型多旋翼重载无人机。
背景技术:
1、传统多旋翼无人机,因构型原因存在性能上的天花板,因此理想载重量大多在30kg以下,难以满足大载重、长航时、远距离运输的要求:目前多旋翼无人机载重鲜有超过40公斤的载重量。现在市面上的多旋翼多采用对称结构,以四、六、八旋翼为主,或者四轴八旋翼、最多十八旋翼,受限于尺寸和螺旋桨的效率,无法提供更多数目的螺旋桨。复合翼无人机因起降阶段采用多旋翼电动系统,虽然可以通过增加轴数或者改油电混合的方式,实现载重上限达到150kg。但因翼展问题,适宜领域受限;载重超过200kg则适宜采用直升机构型,但单机价格昂贵,风险较高,且需要专业的操作人员,性价比较低,难以普及。而且市场上的无人机载重无法灵活扩充,一款机型仅对应一种最大载重量。现有大载重无人机体型庞大,给运输、维护维修和存放空间都提出了大空间的要求。
技术实现思路
1、本实用新型的目的在于提供串列式模块化构型多旋翼重载无人机,以解决上述背景技术中提出的现有大载重无人机体型庞大,给运输、维护维修和存放空间都提出了大空间的要求的问题。
2、为实现上述目的,本实用新型提供如下技术方案:串列式模块化构型多旋翼重载无人机,包括结构框、螺旋桨、储能结构、油箱、控制模块、功能模块一和功能模块二,所述控制模块包括上携带飞控、机载传感器、动力单元和飞控单元,所述功能模块一包括左串列,所述功能模块二包括右串列,所述螺旋桨包括上螺旋桨和下螺旋桨,所述有储能结构包括油动发电机和储能单元;
3、所述控制模块、功能模块一和功能模块二建立通讯连接,所述上螺旋桨和下螺旋桨均与控制模块、功能模块一和功能模块二建立连接,所述上携带飞控、动力单元和飞控单元均与机载传感器建立连接;
4、所述左串列和右串列均与控制模块建立连接;
5、所述控制模块、功能模块一和功能模块二均能够单独组装;
6、所述上螺旋桨和下螺旋桨均采用电动控制和燃油发电,能够增加上螺旋桨和下螺旋桨的桨轴数和桨径。
7、作为本实用新型的一种优选技术方案,所述上携带飞控、机载传感器、动力单元和飞控单元均能够单独完成适宜任务。
8、作为本实用新型的一种优选技术方案,所述螺旋桨提供升力的单元,改变螺旋桨的转速且能够改变升力的大小,让不同的螺旋桨转速不同能够实现多旋翼无人机的操控。
9、作为本实用新型的一种优选技术方案,所述结构框承载无人机各机体单元。
10、作为本实用新型的一种优选技术方案,所述油箱为油动发动机提供燃料。
11、作为本实用新型的一种优选技术方案,所述油动发电机提供发电单元,所述储能单元提供储备电能量。
12、作为本实用新型的一种优选技术方案,所述飞控单元对飞行进行控制,收集传感器数据,实时智能调整飞行姿态以达到设定的飞行轨迹的目的。
13、作为本实用新型的一种优选技术方案,所述左串列与右串列均与控制模块进行串列组合,并配置动力单元、传感器、货舱和外挂点,可内置和外挂各种任务载荷。
14、与现有技术相比,本实用新型的有益效果是:
15、1、通过能够增加桨轴数的同时增加桨径,能够增加多旋翼无人机的大载重问题,采用电动控制加燃油发电的模式,改善多旋翼无人机的续航时间问题,可灵活组装,节省空间,友好运输,造价低廉,技术成熟,提高了对结构的复杂度,增加了多旋翼无人机的飞控复杂度,对结构连接和飞控系统增加功能效率;
16、2、通过采用串列不同模块的方法,将控制模块与功能模块进行组合,以达到满足不同载重任务的需求,该款重载无人机创新性的提出可根据载荷重量需求不同,采用不同模块组装的灵活方式实现从50-150公斤重载要求,因各模块可灵活组装,可用常规化手段按模块进行运输、维护维修和存放,对运输、维护维修和存放空间都大大节省,同时可根据任务不同采用不同的动力系统,应用在各种任务场景中,特别是应对电力行业应急抢修、超高压线路日常运维等领域对100kg左右重载无人机的迫切需求,同时也适用于农业大范围植保、大型光伏基地运维、高层建筑幕墙清洗行业,能够有效降低使用客户的综合成本。
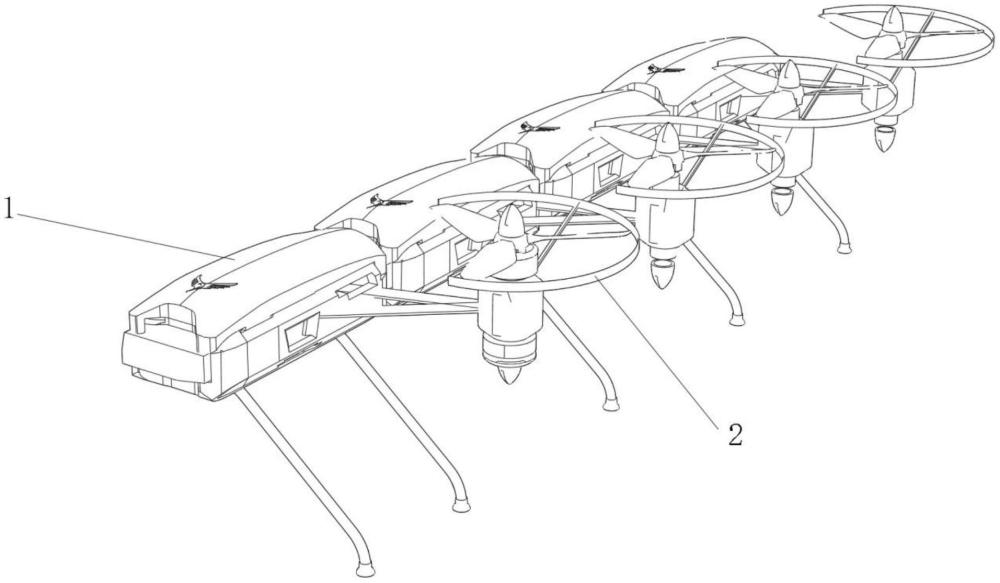
技术特征:1.串列式模块化构型多旋翼重载无人机,包括结构框(1)、螺旋桨(2)、储能结构(3)、油箱(4)、控制模块(5)、功能模块一(6)和功能模块二(7),其特征在于:所述控制模块(5)包括上携带飞控、机载传感器、动力单元和飞控单元,所述功能模块一(6)包括左串列,所述功能模块二(7)包括右串列,所述螺旋桨(2)包括上螺旋桨和下螺旋桨,所述储能结构(3)包括油动发电机和储能单元;
2.根据权利要求1所述的串列式模块化构型多旋翼重载无人机,其特征在于:所述上携带飞控、机载传感器、动力单元和飞控单元均能够单独完成适宜任务。
3.根据权利要求1所述的串列式模块化构型多旋翼重载无人机,其特征在于:所述螺旋桨(2)提供升力的单元,改变螺旋桨(2)的转速且能够改变升力的大小,让不同的螺旋桨(2)转速不同能够实现多旋翼无人机的操控。
4.根据权利要求1所述的串列式模块化构型多旋翼重载无人机,其特征在于:所述结构框(1)承载无人机各机体单元。
5.根据权利要求1所述的串列式模块化构型多旋翼重载无人机,其特征在于:所述油箱(4)为油动发动机提供燃料。
6.根据权利要求1所述的串列式模块化构型多旋翼重载无人机,其特征在于:所述油动发电机提供发电单元,所述储能单元提供储备电能量。
7.根据权利要求1所述的串列式模块化构型多旋翼重载无人机,其特征在于:所述飞控单元对飞行进行控制,收集传感器数据,实时智能调整飞行姿态以达到设定的飞行轨迹的目的。
8.根据权利要求1所述的串列式模块化构型多旋翼重载无人机,其特征在于:所述左串列与右串列均与控制模块(5)进行串列组合,并配置动力单元、传感器、货舱和外挂点,能够内置和外挂任务载荷。
技术总结本技术公开了串列式模块化构型多旋翼重载无人机,包括结构框、螺旋桨、储能结构、油箱、控制模块、功能模块一和功能模块二,所述控制模块包括上携带飞控、机载传感器、动力单元和飞控单元,所述功能模块一包括左串列,所述功能模块二包括右串列,所述螺旋桨包括上螺旋桨和下螺旋桨,所述储能结构包括油动发电机和储能单元,本技术通过能够增加桨轴数的同时增加桨径,能够增加多旋翼无人机的大载重问题,采用电动控制加燃油发电的模式,改善多旋翼无人机的续航时间问题,灵活组装节省空间,友好运输,造价低廉,技术成熟,提高了对结构的复杂度,增加了多旋翼无人机的飞控复杂度,对结构连接和飞控系统增加功能效率。技术研发人员:程瑜锋受保护的技术使用者:武汉赤雀实验室科技有限公司技术研发日:20231225技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/223394.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种无人机遥感测绘装置
下一篇
返回列表