一种安防无人机的制作方法
- 国知局
- 2024-08-01 06:21:15
本发明属于无人机,尤其是涉及一种安防无人机。
背景技术:
1、无人机,全称为无人驾驶飞机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。安防无人机,可以利用携带的摄像机装置,开展大规模的航拍,实现空中俯瞰的效果,从而达到街景拍摄和监控巡查的效果,能够确保人身、财产和环境的安全。
2、目前市场的上现有的安防无人机,在空中巡查和拍摄的过程中,往往存在如下技术问题:
3、1、在使用安防无人机时,无法对鸟类进行驱逐,导致无人机飞行过程中容易受到鸟类的剐蹭碰撞,并进一步对无人机造成损坏;
4、2、当无人机飞行过程中,鸟类容易落在无人机机体上方,导致无人机的负载增大,导致无人机损耗增大。
技术实现思路
1、本发明的目的是针对上述背景技术中提出的问题,提供一种通过撞击产生的较大声响对鸟类进行驱逐,在此过程中往复的抽吸驱鸟剂并排出,防止鸟类靠近无人机,同时使对落在无人机上的鸟类进行轻微电击的安防无人机。
2、为达到上述目的,本发明采用了下列技术方案:
3、一种安防无人机,包括:
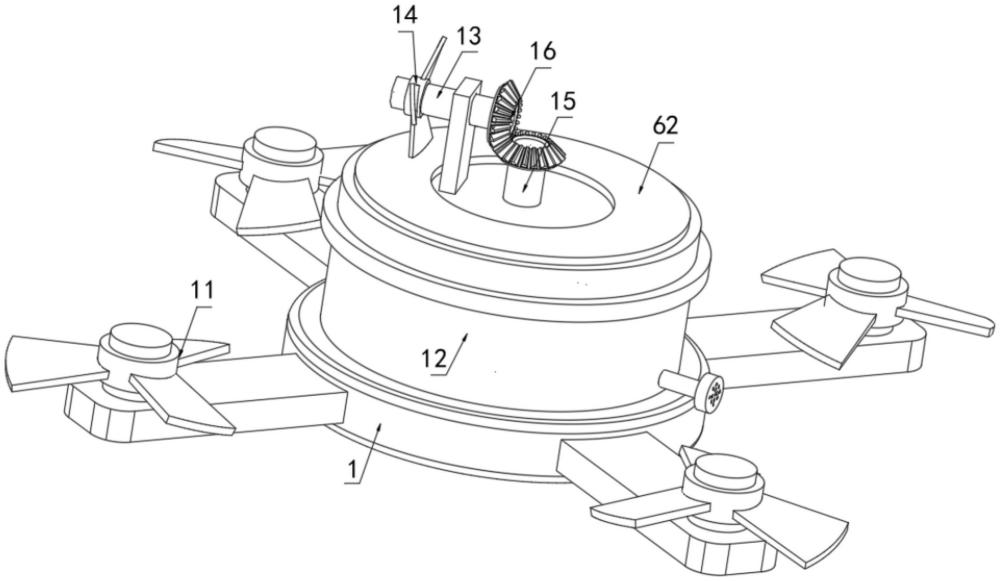
4、机体,所述机体上设有若干个螺旋桨,所述机体上方设有箱体,所述箱体的上方通过支撑板转动安装有驱动杆,所述驱动杆上设有轴流扇叶,所述箱体内转动安装有转杆,所述转杆和驱动杆相互靠近的一端均设有锥齿轮,两个所述锥齿轮相互啮合;
5、所述转杆上设有驱鸟机构,所述驱鸟机构通过发出碰撞的声响来驱鸟;
6、所述箱体内设有抽吸机构,所述抽吸机构用于防止鸟类撞击无人机。
7、优选地,所述驱鸟机构包括两根第一支撑杆、两根转轴、两个摩擦轮、若干个铰接座、若干块摆动板、若干个第一弹簧、若干个碰撞块和摩擦机构,两根所述第一支撑杆均安装于转杆上,每根所述第一支撑杆的下方均转动安装有转轴,每根所述转轴上均固接有摩擦轮,所述箱体的内壁上通过若干个铰接座铰接有若干块摆动板,所述摩擦轮与摆动板接触滚动,每块所述摆动板均通过第一弹簧与箱体的内壁弹性连接,所述箱体的内部设有若干个碰撞块,所述箱体的内壁上设有摩擦机构,所述摩擦机构通过发出金属摩擦噪音来提高驱鸟效果。
8、优选地,所述摩擦机构包括环形齿槽和两个第一齿轮,所述环形齿槽安装于箱体的内壁上,两根所述转轴上均安装有第一齿轮,两个所述第一齿轮均与环形齿槽相互啮合。
9、优选地,所述抽吸机构包括环形抽吸筒、固定块、第二弹簧、移动块、储存箱、传动块、第二支撑杆、两个支撑块、两个滑槽、两个转动套筒、两个第三弹簧、抵块、导向轮和环形导轨,所述环形抽吸筒安装于箱体内,所述环形抽吸筒内设有固定块,所述固定块上通过第二弹簧弹性连接有移动块,所述移动块密封滑动连接于环形抽吸筒的内壁,所述环形抽吸筒的下方设有储存箱,所述移动块上方设有传动块,所述第二支撑杆安装于转杆上,所述第二支撑杆的底部安装有两个支撑块,每个所述支撑块上均开设有滑槽,每个所述滑槽内均滑动连接有转动套筒,每个所述转动套筒均通过第三弹簧与滑槽的内壁弹性连接,两个所述转动套筒上通过连接杆安装有抵块,所述抵块与传动块接触,两个所述转动套筒之间转动安装有导向轮,所述环形抽吸筒上方设有环形导轨。
10、优选地,所述环形抽吸筒通过进液管与储存箱内部连通,所述环形抽吸筒通过排液管与外界连通。
11、优选地,所述进液管和排液管内均设有单向阀。
12、优选地,所述环形导轨上设有梯形凸起,所述导向轮沿着环形导轨上方移动。
13、优选地,所述转杆上通过连杆安装有弧形毛皮块,所述箱体上安装有环形玻璃片,所述弧形毛皮块与环形玻璃片接触,所述箱体的上方设有环形导电片,所述环形导电片通过导电棒与环形玻璃片连接。
14、与现有的技术相比,本安防无人机的优点在于:
15、1、本发明通过设置驱鸟机构,在无人机于高处进行拍摄和巡查工作时,可通过风力带动驱动杆转动,进一步通过锥齿轮带动转杆转动,使第一支撑杆得以进行圆周运动,在第一支撑杆下方的摩擦轮移动至接触摆动板时,将推动摆动板远离碰撞块,并在摩擦轮从摆动板上脱离时,使摆动板在第一弹簧的弹力作用下撞击在碰撞块上,从而通过撞击产生的较大声响对鸟类进行驱逐,防止鸟类靠近无人机。
16、2、本发明通过设置摩擦机构,在第一支撑杆带动转轴和摩擦轮进行圆周运动的过程中,由于转轴上的第一齿轮始终与环形齿槽相啮合,因此使转轴带动摩擦轮发生旋转,由于摩擦轮和摆动板均为金属材质,因此在摩擦轮与摆动板接触,推动摆动板的过程中,可以使摩擦轮和摆动板之间产生刺耳的金属摩擦噪音,提高对鸟类的驱逐效果,有效防止鸟类靠近和撞击无人机,避免对无人机造成损坏。
17、3、本发明通过设置抽吸机构,在转杆转动的过程中,还将带动第二支撑杆进行圆周运动,从而带动导向轮于环形导轨上进行圆周运动,带动移动块同步于环形抽吸筒内移动,将储存箱内的驱鸟剂抽至环形抽吸筒内,在导向轮移动至梯形凸起处时,梯形凸起对导向轮进行顶起,使抵块不再抵接传动块,移动块得以在第二弹簧的弹力作用下自动弹回初始位置,将环形抽吸筒内的驱鸟剂输送至外界,对无人机周侧的鸟类进行更进一步的驱逐,提高对不受噪音影响的部分鸟类的驱逐效果,尽可能的减少鸟类撞击无人机,提高无人机的使用寿命。
18、4、本发明通过设置弧形毛皮块和环形玻璃片,在转杆转动时,还将带动弧形毛皮块沿着环形玻璃片进行移动,从而通过摩擦使环形玻璃片上产生静电,并且进一步将静电通过导电棒输送至环形导电片上,从而通过产生的静电对落在无人机上的鸟类进行轻微电击,防止鸟类落在无人机上,避免无人机由于承载鸟类导致负载增大,同时不会伤害到鸟类的生命。
技术特征:1.一种安防无人机,其特征在于,包括:
2.根据权利要求1所述的安防无人机,其特征在于,所述驱鸟机构(2)包括两根第一支撑杆(21)、两根转轴(22)、两个摩擦轮(23)、若干个铰接座(24)、若干块摆动板(25)、若干个第一弹簧(26)、若干个碰撞块(27)和摩擦机构(28),两根所述第一支撑杆(21)均安装于转杆(15)上,每根所述第一支撑杆(21)的下方均转动安装有转轴(22),每根所述转轴(22)上均固接有摩擦轮(23),所述箱体(12)的内壁上通过若干个铰接座(24)铰接有若干块摆动板(25),所述摩擦轮(23)与摆动板(25)接触滚动,每块所述摆动板(25)均通过第一弹簧(26)与箱体(12)的内壁弹性连接,所述箱体(12)的内部设有若干个碰撞块(27),所述箱体(12)的内壁上设有摩擦机构(28),所述摩擦机构(28)通过发出金属摩擦噪音来提高驱鸟效果。
3.根据权利要求2所述的安防无人机,其特征在于,所述摩擦机构(28)包括环形齿槽(281)和两个第一齿轮(282),所述环形齿槽(281)安装于箱体(12)的内壁上,两根所述转轴(22)上均安装有第一齿轮(282),两个所述第一齿轮(282)均与环形齿槽(281)相互啮合。
4.根据权利要求1所述的安防无人机,其特征在于,所述抽吸机构(3)包括环形抽吸筒(31)、固定块(32)、第二弹簧(33)、移动块(34)、储存箱(35)、传动块(36)、第二支撑杆(37)、两个支撑块(38)、两个滑槽(39)、两个转动套筒(310)、两个第三弹簧(311)、抵块(312)、导向轮(313)和环形导轨(314),所述环形抽吸筒(31)安装于箱体(12)内,所述环形抽吸筒(31)内设有固定块(32),所述固定块(32)上通过第二弹簧(33)弹性连接有移动块(34),所述移动块(34)密封滑动连接于环形抽吸筒(31)的内壁,所述环形抽吸筒(31)的下方设有储存箱(35),所述移动块(34)上方设有传动块(36),所述第二支撑杆(37)安装于转杆(15)上,所述第二支撑杆(37)的底部安装有两个支撑块(38),每个所述支撑块(38)上均开设有滑槽(39),每个所述滑槽(39)内均滑动连接有转动套筒(310),每个所述转动套筒(310)均通过第三弹簧(311)与滑槽(39)的内壁弹性连接,两个所述转动套筒(310)上通过连接杆安装有抵块(312),所述抵块(312)与传动块(36)接触,两个所述转动套筒(310)之间转动安装有导向轮(313),所述环形抽吸筒(31)上方设有环形导轨(314)。
5.根据权利要求4所述的安防无人机,其特征在于,所述环形抽吸筒(31)通过进液管与储存箱(35)内部连通,所述环形抽吸筒(31)通过排液管(4)与外界连通。
6.根据权利要求5所述的安防无人机,其特征在于,所述进液管和排液管(4)内均设有单向阀。
7.根据权利要求4所述的安防无人机,其特征在于,所述环形导轨(314)上设有梯形凸起(5),所述导向轮(313)沿着环形导轨(314)上方移动。
8.根据权利要求1所述的安防无人机,其特征在于,所述转杆(15)上通过连杆安装有弧形毛皮块(6),所述箱体(12)上安装有环形玻璃片(61),所述弧形毛皮块(6)与环形玻璃片(61)接触,所述箱体(12)的上方设有环形导电片(62),所述环形导电片(62)通过导电棒与环形玻璃片(61)连接。
技术总结本发明属于无人机技术领域,尤其是涉及一种安防无人机,包括机体,所述机体上设有若干个螺旋桨,所述机体上方设有箱体,所述箱体的上方通过支撑板转动安装有驱动杆,所述驱动杆上设有轴流扇叶,所述箱体内转动安装有转杆,所述转杆和驱动杆相互靠近的一端均设有锥齿轮,两个所述锥齿轮相互啮合;所述转杆上设有驱鸟机构。本发明通过设置驱鸟机构,在无人机于高处进行拍摄和巡查工作时,通过风力摆动板往复撞击在碰撞块上,从而通过撞击产生的较大声响对鸟类进行驱逐,防止鸟类靠近无人机;通过设置抽吸机构,将环形抽吸筒内的驱鸟剂输送至外界,对无人机周侧的鸟类进行更进一步的驱逐,提高对不受噪音影响的部分鸟类的驱逐效果。技术研发人员:刘长芹,张浩,陈宝秋受保护的技术使用者:山东锦工有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/223442.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表