一种海洋拖曳缆记忆合金自控压载器
- 国知局
- 2024-08-01 06:22:39
本发明涉及一种水下压载器,特别涉及一种海洋拖曳缆记忆合金自控压载器。
背景技术:
1、近年来,随着人类对海洋的不断探索,在深远海探测方面,水下操控便捷、数据采集及传输能力强的压载器是尤为重要的。压载器由于工作环境及其苛刻,需要下潜数百米甚至上千米,传统的压载器很难高质量的完成任务。而且压载器在水下工作时由于船体自身的速度会通过缆绳传递给压载器,使得压载器会受到一个斜向上的力,从而使得压载器逐渐偏离,不再保持在竖直方向工作,最终导致采集的数据不在同一水平面。因此要求压载器不仅能在船速正常行驶的过程中保持自身的平衡,而且还要提供一个垂直向下的力,以保持压载器和缆绳一直处于竖直面内工作。因此迫切需要设计一种新型压载器,以解决上述技术问题。
技术实现思路
1、本发明的目的在于提出一种海洋拖曳缆记忆合金自控压载器,以解决水下作业过程中压载器不能保持在竖直面内工作的问题,具有稳定性强等优点。
2、本发明为了实现上述目的,采用如下技术方案:
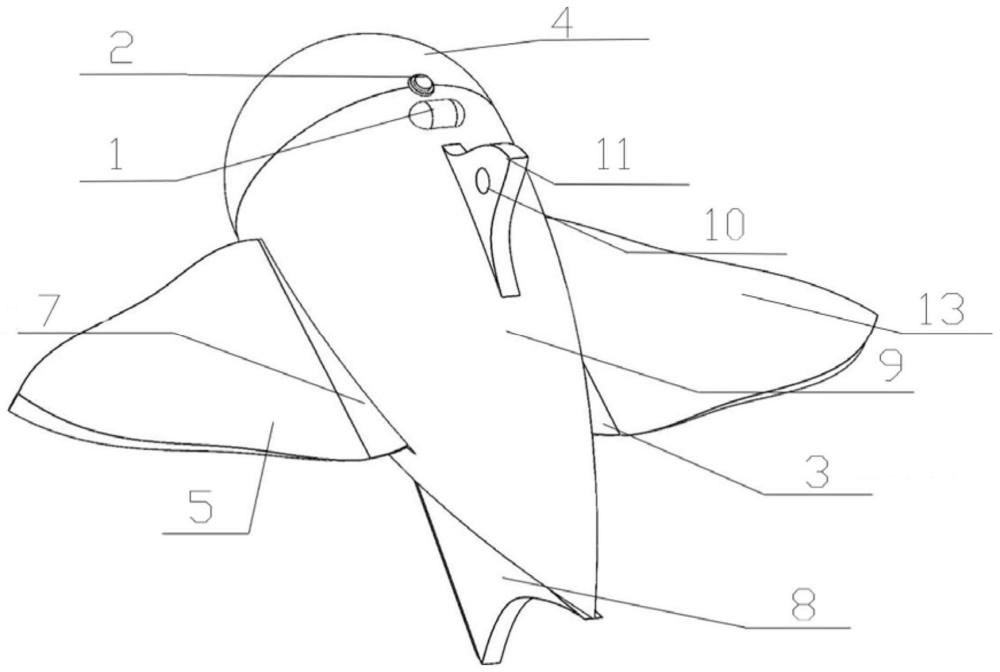
3、一种海洋拖曳缆记忆合金自控压载器,包括主体结构、感知模块、控制仓、侧翼、尾翼、侧翼驱动单元以及缆绳连接装置;
4、其中,感知模块包括倾角传感器、压力传感器以及采集控制器;
5、倾角传感器以及压力传感器均设置于所述主体结构的壳体上,其中倾角传感器用于感知压载器本身左右是否平衡,压力传感器用于感知当前位置的深度;
6、倾角传感器、压力传感器分别通过控制线缆与采集控制器相连;采集控制器通过控制线缆与控制仓相连,且用于生成压力数据和倾斜角度并传递给所述控制仓;
7、控制仓和采集控制器位于所述主体结构内,所述主体结构内还设有配重结构;
8、侧翼有两个,且分别位于所述主体结构的一组相对侧;
9、两个所述侧翼均采用软体翼结构;其中侧翼驱动单元有两组,且每组侧翼驱动单元对应安装于一组侧翼处,且分别用于带动对应侧的侧翼实现运动;
10、两组侧翼驱动单元均采用sma丝驱动单元,分别通过控制线缆与控制仓相连且独立控制;
11、尾翼位于主体结构的后侧下方,且安装于所述主体结构上;
12、缆绳连接装置安装于主体结构的顶部中间位置,在缆绳连接装置上设有缆绳挂点。
13、此外,本发明还提出了一种海洋拖曳缆记忆合金自控压载器的使用方法,其采用如上所述的海洋拖曳缆记忆合金自控压载器,该使用方法具体包括如下步骤:
14、将压载器的缆绳挂点通过缆绳连接于船体上,当缆绳完全释放时,压载器会处于船体的正下方,此时压载器的压力传感器会采集此深度的压力,将此压力作为参考压力,并将此时压载器相对于船体的位置作为压载器的期望位置;
15、当悬挂压载器的船体在水下作业过程中,存在如下三种情况,即船体向前加速行驶、船体向前减速行驶以及船体转弯,上述三种情况下压载器的调整过程分别如下:
16、当船体向前加速行驶时:压载器将不在竖直面,压载器会位于压载器的期望位置的后面偏上的位置处,此时每间隔固定时间采集当前深度的压力并与参考压力对比;如果当前深度的压力小于参考压力时,会被采集控制器捕捉到,采集控制器将信号传递至控制仓,控制仓控制侧翼驱动单元即sma丝驱动单元动作,sma丝驱动单元发生弯曲,带动侧翼扇动,使其提供一个竖直向下的力,帮助压载器恢复到竖直面进行工作;每当船体加速时,压载器均会重复上述过程,直至当前压力等于参考压力;
17、当船体向前减速行驶时:压载器同样将不在竖直面内工作,压载器会位于压载器的期望位置的前面偏上的位置处,此时每间隔固定时间采集当前深度的压力并与参考压力对比;如果采集控制器采集到当前深度的压力小于参考压力时,会将信号传递至控制仓,控制仓控制sma丝驱动单元动作,sma丝驱动单元发生弯曲,带动侧翼扇动,使其提供一个竖直向下的力,帮助压载器恢复到竖直面进行工作;每当船体减速时,自控压载器会重复上述过程,直至当前压力等于参考压力;
18、当船体转弯时:压载器自身的倾角传感器会及时采集自身倾斜的角度,及时将数据通过后控制缆线传送给采集控制器,采集控制器会对数据进行比对处理,若采集的数据超过预设的额定值时,控制仓会立即控制压载器身体侧倾较高一侧的sma丝驱动单元动作,该侧的sma丝驱动单元会单独弯曲,提供一个竖直向下的力,实现单侧翼的单独控制,保持压载器稳定。
19、本发明具有如下优点:
20、如上所述,本发明述及了一种海洋拖曳缆记忆合金自控压载器,该压载器包括主体结构、感知模块、控制仓、侧翼、尾翼以及缆绳连接装置等结构。其中,感知模块包括倾角传感器、压力传感器以及采集控制器,倾角传感器用于感知压载器本身左右是否平衡,压力传感器用于感知当前位置的深度。侧翼采用软体翼结构,并配置有侧翼驱动单元,该侧翼驱动单元采用sma丝驱动单元。当压载器悬挂于船体底部时,在船体向前加速、减速以及转弯行驶时,通过感知模块感知压载器本身是否左右平衡以及当前的深度位置,并且在需要调整时,由控制仓控制侧翼驱动单元动作,进而带动侧翼实现扇动,帮助压载器恢复到竖直面进行工作,另外,配合侧翼、尾翼以及缆绳连接装置的特殊结构设计,保证压载器具有较好的稳定性。
技术特征:1.一种海洋拖曳缆记忆合金自控压载器,其特征在于,包括主体结构、感知模块、控制仓、侧翼、尾翼、侧翼驱动单元以及缆绳连接装置;
2.根据权利要求1所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
3.根据权利要求2所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
4.根据权利要求1所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
5.根据权利要求1所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
6.根据权利要求1所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
7.根据权利要求6所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
8.根据权利要求1所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
9.根据权利要求1所述的海洋拖曳缆记忆合金自控压载器,其特征在于,
10.一种海洋拖曳缆记忆合金自控压载器的使用方法,基于上述权利要求1至9任一项所述的海洋拖曳缆记忆合金自控压载器,其特征在于,所述使用方法包括如下步骤:
技术总结本发明公开了一种海洋拖曳缆记忆合金自控压载器,其包括主体结构、感知模块、控制仓、侧翼、尾翼以及缆绳连接装置。感知模块包括倾角传感器、压力传感器以及采集控制器,倾角传感器用于感知压载器本身左右是否平衡,压力传感器用于感知当前位置的深度。侧翼采用软体翼结构并配置有侧翼驱动单元,该侧翼驱动单元采用SMA丝驱动单元。压载器悬挂于船体底部,当船体向前加速、减速以及转弯行驶时,通过感知模块感知压载器本身是否左右平衡以及当前的深度位置,并且在需要调整时,由控制仓控制侧翼驱动单元动作,进而带动侧翼实现扇动,帮助压载器重新恢复到竖直面进行工作,另外侧翼、尾翼和缆绳连接装置的结构设计,能够保持压载器具有较好的稳定性。技术研发人员:李俊漾,温琦,杨华,胡奇强,王世杰,李辽,高立波,海振银受保护的技术使用者:中国海洋大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223558.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。