用于提升和移动重物的系统的制作方法
- 国知局
- 2024-08-01 06:24:05
本发明涉及一种用于提升和搬运物体的运输系统,更具体地,本发明涉及一种用于将电池组装载到海运船只上和从海运船只上卸载电池组的运输系统。
背景技术:
1、近年来,人们越来越努力使海船从燃料驱动发动机转向电力驱动系统,以减少海运业的二氧化碳排放量。
2、由电池驱动的海运船只,如小船、轮船和渡轮,通常会永久地安装电池,电池在船只停泊时充电。一些渡轮和大多数用于接送乘客和车辆的轻型高速船只在码头停留的时间只有几分钟,不足以为这些类型的海运船只所需的大容量电池充电。
3、有一种穿梭服务船只通常会在上午和下午连续运行几个小时,同时在码头逗留。连续运行数小时所需的固定式电池装置需要大型电池组,这将导致船上重量大幅增加。由于轻型高速船只对重量非常敏感,因此不宜装载过多重量,否则会导致能耗增加。
4、还有一些高速船只在沿海或峡湾的长途航线运行,这种航程通常长达数小时,沿途会有中途停靠站。中途停靠站通常不可能充电,这意味着充电只有在终点停靠站才需要进行,而且通常需要使用柴油作为增程剂。如此长的纯电动航程需要一个非常大的永久安装的电池组。电池组的重量和尺寸将成为船只的尺寸限制因素,迫使船只尺寸和成本增加。此外,终点停靠站所需的充电功率将变得非常高,有时会导致高昂的电网加固费用。
5、永久安装的大型电池组的替代方案是使用较小的电池组,这些电池组可以在码头,无论是终点站还是中途站进行更换和充电,从而最大限度地减小增加的重量。这样,轻型高速船只就有可能通过在每次或每隔一次停靠时更换电池组来连续运行长达一整天。此外,使用可更换的较小电池组,可使正常尺寸的船只在纯电池运行的情况下进行零排放的长途旅行。电池更换也是改装现有柴油船只的理想选择,因为这些船只的设计通常无法承受大型电池组的重量。此外,在同一码头上航行的多艘船只可以共用一个公共电池池,从而减少所需的总电池容量,并从共享经济中获益。
6、因此,有必要找到一种在船只停靠码头时将用过的电池更换为已充电电池的解决方案。理想情况下,这种电池更换应该完全自动化,并在船只停靠的短时间内完成。
7、wo 2018/084716 a1描述了一种用于在浮动船只上的电池舱和位于船只外的充电站之间更换可充电电池的运输系统,以使得船只可以靠近充电站定位。该运输系统基于用于移动电池组的升降台、带有配置为使用绞盘装置来提升电池组的可移动臂的塔式支架、或用于运输电池组的传送带。wo 2018/084716 a1中描述的系统给出了难以通过自动化完成复杂操作。此外,船只移动,特别是小型船只的移动,可能会导致这些电池运输作业的延误。
8、wo 2020/190147 a1描述了一种用于海船的自主电池交换系统,其中,自驱动电池组件在海岸上的充电站和船上的坞站之间行驶。自驱动电池组件配置为在坞站和充电站之间自主移动。为了在坞站和充电站之间来回行驶,自驱动电池组件使用码头上的海船装载坡道,这可能会干扰和中断车辆或乘客的通行,从而延误船舶的离港。
9、wo 90/08093描述了一种从浮动船只上装卸集装箱的运输系统。该运输系统包括可横跨船只的吊臂、可沿吊臂移动的吊车,以及用于悬挂在吊车上的集装箱的吊装装置。吊臂由两个支撑结构支撑,一个支撑结构在海岸上,另一个在船只海边的浮动基座上。吊车的浮动部分可以从陆地安装部分分离出来。
10、与大型集装箱船相比,小型海船,例如用于乘客和车辆的穿梭服务的船只,在码头时更容易受到水中运动的影响。wo 90/08093中描述的运输系统是为大型集装箱船设计的,无法充分补偿小型船只的摇晃和倾斜。船的移动,尤其是小型船的移动,会在来回运输电池时造成延误。因此,这种吊装系统不太适合用于对小型海船进行装卸。
11、鉴于上述问题,还需要开发一种用于将物体,例如电池组装载到浮动船只上和从浮动船只上卸载的运输系统。
技术实现思路
1、本发明的目的是提供一种稳定的运输系统,用于将电池组以及其他物体运入和运出船只,其中船只的移动可以得到补偿。
2、本发明的目的通过以下说明书和随后的权利要求中具体说明的特征来实现。
3、本发明由独立专利权利要求定义。从属权利要求定义了本发明的有利实施例。
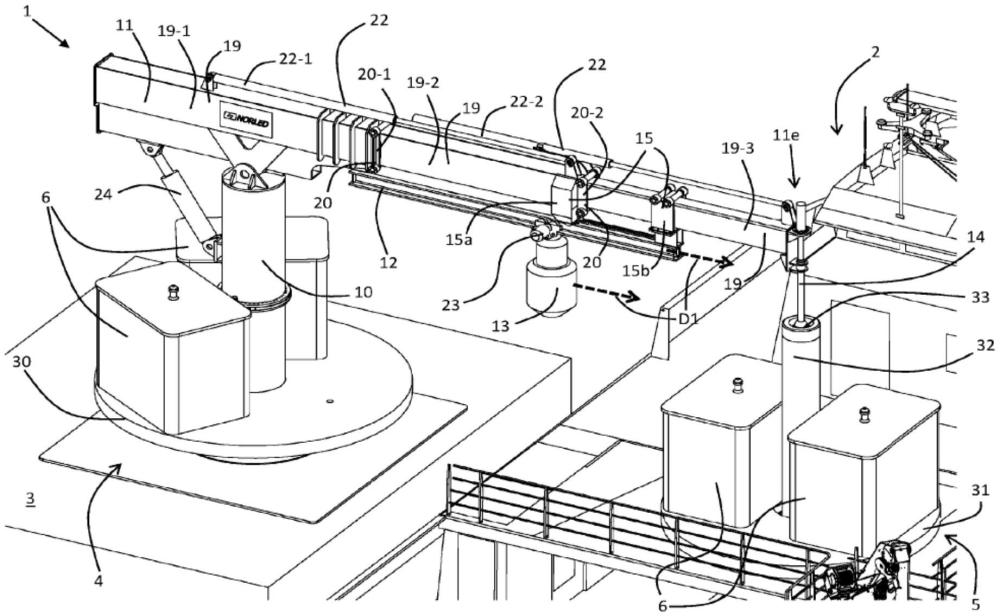
4、在第一方面,本发明涉及一种运输系统,用于在存储区域和目标区域之间来回运输物体,其中,所述运输系统包括:
5、-基座,用于放置于所述存储区域和所述目标区域中的一者,
6、-主吊臂,可枢转地连接到所述基座上,其中,所述主吊臂具有远端,所述远端配置为由所述存储区域和所述目标区域中的另一者支撑,同时允许所述主吊臂与所述存储区域和所述目标区域中的另一者之间具有至少一个旋转自由度,其中,至少在所述运输系统的第一转运模式期间所述主吊臂的跨度在长度上为被动可调的,
7、-运输吊臂,与所述主吊臂连接,以及
8、-物体搬运件,通过所述运输吊臂引导,并配置为搬运待在所述存储区域和所述目标区域之间运输的物体。
9、根据本发明的运输系统的特征的效果如下:首先,当通过物体搬运件沿着运输吊臂转移物体时,主吊臂两侧的支撑件在两个区域之间提供了稳定的机械连接。其次,运输系统通过以下两个特征来容忍船只的移动。第一个特征是主吊臂的跨度的长度可动态地调节,这允许至少在运输系统的第一转运模式下,主吊臂可以补偿船只的移动。替代地,主吊臂的一部分可以被锁定,而另一部分则是被动可调的。主吊臂的跨度的长度的被动调整在说明书中也被称为自由浮动模式。运输系统还可以有另一种转运模式,其中,通过致动器主动地控制主吊臂的跨度的长度。为了允许补偿船只的移动,如波荡、倾斜和摇晃,需要在主吊臂和基座之间具有可枢转地连接,而且系统还需要在主吊臂的远端和其在基座对面区域的支撑件之间的至少一个旋转自由度。特别是这两个特征的结合,可以使船只在停靠码头时完全自由地摇晃、倾斜、波荡和移动。主吊臂的跨度的可调长度可以补偿船只因摇晃、波荡和移动而产生的运动。支撑在船只上的吊臂的远端需要具有至少一个旋转自由度,以补偿倾斜运动。对运输系统来说,吊臂在储存区域和目标区域进行机械地连接的同时允许船只运动,是重要的。否则,船只运动产生的力可能会损坏和破坏系统的部件。此外,主吊臂的跨度的可调长度构成了补偿(或者可以说是“容忍”)船只运动的安全方法。主吊臂不需要与基座可滑动连接,来补偿船只运动,船只运动具有伸出基座背面的危险风险。这也意味着,在运输物体的过程中,主吊臂不会在基座后面来回移动。因此,在物体的运输过程中,人和车辆可以在基座后面自由运动。
10、为了便于理解本发明,下文对一个或多个表述作了进一步定义。
11、在整个说明书和权利要求书中,“主吊臂的跨度”应解释为主吊臂端点之间的范围。
12、在整个说明书和权利要求书中,“物体”一词必须解释为可以在两个区域之间运输的任何类型的货物。物体可以是电池组、氢气罐、其他模块、箱子、集装箱或货物。
13、在整个说明书和权利要求书中,“物体搬运件”一词必须被解释为用于抓取和提升物体的任何类型的抓取装置。物体搬运件的替代词有对接头、遥控操作车(rov)、对接钩、对接杆、对接爪、对接蘑菇、真空吸盘、真空头、对接机构、货物致动器、可移动小车、负载致动器、机械夹具、机械臂、自动挂钩、磁头和闩锁机构。
14、在整个说明书和权利要求书中,“存储区域”一词必须解释为可以放置物体的任何区域。储存区域可以是海岸上、浮动平台上、浮动船只上或码头上的区域。
15、在整个说明书和权利要求书中,“目标区域”一词必须解释为可以放置物体的任何区域。储存区域可以是海岸上、浮动平台上、浮动船只上或码头上的区域。
16、在整个说明书和权利要求书中,“基座”一词必须解释为可以支撑吊臂的任何结构。基座的替代词有起重支撑件、机械臂支撑件、横梁支撑件和吊臂支撑件。
17、在整个说明书和权利要求书中,“吊臂”一词必须解释为包括在水平面上伸展的臂的结构。吊臂的替代词有臂、机械臂、构件、横梁。
18、在整个说明书和权利要求书中,“被动可调”一词必须解释为在外力作用下可调,即浮动船只靠海岸时的运动(即倾斜、摇晃、偏航、波荡、摆动和浪涌)。这意味着,当主吊臂因浮动船只的运动而被动可调时,主吊臂不会产生有意的反作用力来抑制或抵消这些运动。
19、在整个说明书和权利要求书中,“运输吊臂”一词必须理解为包括在水平面上延伸的臂的结构,该臂可移动物体搬运件,或可在其上引导物体搬运件。运输吊臂的替代词有臂、机械臂、构件、横梁、导向件。
20、在整个说明书和权利要求书中,“连接”一词必须解释为两个吊臂之间的连接件。它可以是固定的联轴器,也可以是一个可移动或可滑动的联轴器。连接的替代词有连接件、锁定件或接头。
21、在整个说明书和权利要求书中,“伸缩接头”一词必须理解为两个构件之间的可移动连接,其中一个构件可在另一个构件内滑动。伸缩接头的替代词是伸缩连接件和伸缩联轴器。
22、在整个说明书和权利要求书中,“浮动船只”一词必须被解释为漂浮在水体上的船只。浮动船只的替代词有海船、高速船只、渡船、轮船、小船、驳船和木筏。
23、在整个说明书和权利要求书中,“浮动平台”必须解释为漂浮在水体上的平台。浮动船只的替代词有驳船、木筏、浮桥、基座和浮标。
24、在整个说明书和权利要求书中,“运输设备”一词必须解释为任何能够接收物体并将其移动到物体搬运件可触及范围内或物体搬运件可触及范围外的设备。运输设备的替代词有平台、可旋转转盘、可移动平台、传送带、车辆、机器人存储设施、叉车、起重机和齿轮齿条系统。
25、在根据本发明的运输系统的一个实施例中,所述运输吊臂可移动地安装在所述主吊臂上。这个实施例的优点在于,运输吊臂相对于主吊臂的滑动可以补偿主吊臂的跨度的动态长度调整。
26、在根据本发明的运输系统的一个实施例中,该系统进一步包括在所述运输吊臂和所述主吊臂之间的至少两个联轴器。至少一个所述联轴器配置为用于致动所述运输吊臂,以调节所述运输吊臂相对于所述主吊臂的位置。这样就能控制运输吊臂相对于主吊臂的位置。运输吊臂相对于主吊臂的相对运动意味着运输吊臂可以比主吊臂短,但仍具有与主吊臂相同的跨度,因为运输吊臂可以在主吊臂的长度范围内来回移动。这有利于增加沿主吊臂运输物体的范围。
27、在根据本发明的运输系统的另一个实施例中,所述主吊臂的所述远端包括垂直支撑件,所述垂直支撑件用于抵靠在所述存储区域和所述目标区域中的另一者上。这个实施例构成了确保主吊臂与存储区域和目标区域中的另一者之间具有至少一个旋转自由度的简单方法。因此,主吊臂可相对于其被支撑的区域进行枢转。
28、在根据本发明的运输系统的另一个实施例中,所述垂直支撑件的长度是可伸展的。这有利于将垂直支撑件放置在其所支撑的区域的操作。当运输系统不运行时,所述垂直支撑件的长度还可以缩短,并减少占用空间。
29、在根据本发明的运输系统的另一个实施例中,所述主吊臂包括第一副吊臂和与所述第一副吊臂可枢转地连接的第二副吊臂。这允许对主吊臂的跨度的调整,从而允许运输系统补偿船只运动。
30、在一种实施例中,所述主吊臂为可折叠的,例如沿垂直方向或沿水平方向折叠。运输系统的这两种实施方式能够调整主吊臂的跨度,允许运输系统补偿船只运动。沿垂直方向可折叠的主吊臂可称为转向节吊臂,这是起重机技术领域的已知术语。
31、在根据本发明的一个实施例中,所述主吊臂包括至少一个伸缩接头。这构成了用于所述系统的转向节吊臂和水平可折叠吊臂的替代配置,以通过实现主吊臂的长度的调整来允许主吊臂的跨度的调整。该实施例的一个显著优点是,当运输系统收缩且不运行时,吊臂将占用更少的空间。
32、根据本发明的运输系统的一个实施例,所述主吊臂包括至少两个伸缩接头,所述伸缩接头用于所述主吊臂的跨度的调整。该实施例允许对主吊臂的长度的调整的进一步选择。此外,在系统不运行时,吊臂可以做得更短,而吊臂的跨度可以与带有一个伸缩接头的吊臂一样大。
33、在根据本发明的运输系统的另一个实施例中,两个所述伸缩接头中每一个的运动由致动器控制。所述致动器可以是液压缸,也可以是电力致动的致动器。
34、在根据本发明的运输系统的一个实施例中,每个致动器都有锁定模式和自由浮动模式。当所述致动器处于所述锁定模式时,所述致动器为刚性的,用于锁定对应伸缩接头的位置。当所述致动器处于所述自由浮动模式时,所述致动器可以自由地伸展或收缩,以允许所述主吊臂的跨度的长度的被动调整。这个实施例的优点在于,它可以根据实际要求在上述模式之间进行切换,即稳定性与灵活性。当所述物体搬运件位于例如目标区域一侧的主吊臂的端部时,位于对侧(即存储区域)的伸缩接头的致动器可以处于自由浮动模式,而位于目标区域一侧的伸缩接头的致动器可以处于锁定模式。这样,离物体搬运件最远的伸缩接头可以自由移动,从而补偿船只的运动,而最靠近物体搬运件的伸缩接头的锁定位置则带来稳定的配置,有利于物体搬运件从目标区域抓取和提升物体。当物体搬运件向存储区域移动时,位于存储区域一侧的致动器从自由浮动模式切换到锁定模式,而位于目标区域一侧的致动器则从锁定模式切换到自由浮动模式。因此,主吊臂在目标区域一侧的长度可调,可以补偿船只的运动,而主吊臂在存储区域一侧是稳定的,有利于物体搬运件在存储区域对物体的放置。
35、在根据本发明的运输系统的一个实施例中,所述物体搬运件相对于所述运输吊臂可移动,并设置有用于操纵所述物体搬运件相对于所述运输吊臂的位置的致动器。这个实施例的优点在于,可以控制物体搬运件在运输吊臂上的运动,以便在存储区域和目标区域之间运输物体。它还增加了转移物体的范围。
36、在根据本发明的运输系统的一个实施例中,所述物体搬运件的长度可调,以便于拾取或释放物体。高度的可调节性应确保物体与所站立的地面之间有足够的间隙。在运输系统的原型中,该间隙设计为300mm,这就决定了物体搬运件的长度可调节性至少为300mm。
37、在根据本发明的运输系统的一个实施例中,所述物体搬运件配置为用于抓取或释放物体的抓取接口。这有利于运输操作中的提升部分,并且易于实现自动化。
38、在物体搬运件长度可变的实施例的一个变形中,所述物体搬运件可以替代地具有固定长度。在这个实施例中,为了在物体和物体所站立的地板之间留出间隙,可以使相应的地板(而不是物体搬运件)的高度可调,以形成必要的间隙,并允许物体搬运件沿着运输吊臂移动物体。这当然适用于存储区域和目标区域。在另一种组合中,物体搬运件和相应地板的长度或高度都是可调节的。
39、在根据本发明的运输系统的一个实施例中,所述物体搬运件包括机械爪,所述机械爪用于抓取物体的所述抓取接口。
40、在根据本发明的运输系统的一个实施例中,所述物体搬运件包括真空头,所述真空头用于抓取物体的所述抓取接口。
41、在运输系统的一个实施例中,所述物体搬运件为可控地可旋转,用于操纵悬挂在所述物体搬运件上时的物体的方向。这个实施例的优点是有利于将物体放置在目标区域或存储区域。这一过程也会使运输操作更加快捷。
42、在根据本发明的运输系统的一个实施例中,该系统进一步包括位于所述存储区域的运输设备,所述运输设备用于接收物体,并将所述物体移动到所述物体搬运件可触及的范围内或所述物体搬运件可触及的范围外。运输系统的这个实施例对于需要在存储区域和目标区域之间运输多个物体时是有利的。在运输系统用于在浮动船只和海岸之间转移电池组的情况下,运输设备可以便于将电池组从海岸上的存储区域进一步运输到例如用于给已使用的电池组充电的充电站。为空电池组充电的充电站可以与海岸上的运输设备集成在一起。在浮动船只上的存储区域的运输设备可配置为与浮动船只的电机电连接。
43、在根据本发明的运输系统的一个实施例中,该系统还包括位于所述目标区域的另一运输设备,所述运输设备用于接收物体,并将所述物体移动到所述物体搬运件可触及的范围内或所述物体搬运件可触及的范围外。运输系统的这个实施例对于需要在存储区域和目标区域之间运输多个物体时是有利的。在运输系统用于在浮动船只和海岸之间转移电池组的情况下,另一运输设备可以便于将电池组从海岸上的目标区域进一步运输到例如用于给已使用的电池组充电的充电站。为空电池组充电的充电站可与海岸上的附加运输设备集成在一起。在浮动船只上的目标区域的另一运输设备可配置为与浮动船只的电机电气连接。
44、在根据本发明的运输系统的一个实施例中,所述运输设备和/或所述另一运输设备可以选自包括以下的组:平台、可旋转转盘、可移动平台、传送带、车辆、机器人存储设施、叉车、起重机和齿轮齿条系统。如上所述,本发明的这一实施例对于需要在存储区域和目标区域之间运送多个物体时是有利的。在可旋转转盘的情况下,物体搬运件将物体放在转盘上的空位上,释放物体并向上移动,以在物体和物体搬运件之间形成空间。然后转盘旋转,使得第二个物体被放置在物体搬运件的下方,使其可供物体搬运件抓取和提升。类似地,传送带可以从物体搬运件的下方移走已转移的物体,然后将第二个要转移的物体放在物体搬运件的下方,进行第二次转移操作。可移动平台可沿与存储区域和目标区域之间的物体的传送方向基本正交的方向移动。
45、在根据本发明的运输系统的另一个实施例中,所述运输设备和/或所述另一运输设备包括用于存放物体的壳体,其中所述壳体包括门。壳体可以保护物体免受风雨等恶劣天气的影响。所述门可以打开,以便物体搬运件可以抓住物体并将其从运输设备或另一运输设备中提升。
46、在根据本发明的运输系统的另一个实施例中,所述存储区域和所述目标区域中的一者放置在浮动船只或浮动平台上。在放置在浮动船只的情况下,目标区域和存储区域优选地放置成使得支撑主吊臂的基座不放置在船只上。然而,支撑主吊臂的基座也可以放置在船只上,但这会增加船只的负载,导致船只运行时的能耗增加。然而,这是可能的,此外,如果大型浮动平台用作存储区域,这个问题就不存在了。
47、在根据本发明的运输系统的另一个实施例中,所述存储区域和所述目标区域中的另一者放置在另一浮动船只或浮动平台上。在将存储区域或目标区域中的一者放置在浮动船只或平台上的情况下,最好在系统中具有用于根据潮汐条件和/或浮动船只或平台的负载情况进行调整的机构。将存储区域和目标区域中的另一者放置在另一浮动船只或浮动平台上,就不需要根据潮汐条件和/或负载情况进行调整了。
48、在根据本发明的运输系统的一个实施例中,所述运输设备和/或所述另一运输设备的高度可调。这种高度调整可以适应潮汐变化和/或浮动船只的负载情况。或者,这种高度可调性还可用于将物体置于物体搬运件的可触及范围内(即缩小物体与地面之间的间隙),或用于从物体搬运件处接收物体。这在物体搬运件的长度不可调的实施例中尤其有用。
49、在运输系统的另一个实施例中,所述基座的高度可调。这种高度调节可以适应潮汐变化和/或浮动船只的负载情况。
50、在根据本发明的运输系统的一个实施例中,所述存储区域和所述目标区域中的另一者包括支撑件,所述支撑件配置为用于接收所述主吊臂的端部或所述主吊臂的所述垂直支撑件。该实施例的优点在于,它可以进一步稳定主吊臂与支撑件之间的机械连接,并使主吊臂与存储区域和目标区域中的另一者之间的连接操作更加简便。
51、在根据本发明的运输系统的一个实施例中,所述垂直支撑件包括球头,所述存储区域和所述目标区域中的另一者的支撑件包括球窝,用于在与所述垂直支撑件接触时与所述球体一起形成球连接。本实施例的优点在于,球连接在垂直支撑件与存储区域和目标区域中的另一者的支撑件之间形成可枢转的连接,同时保持两部分之间的机械连接。
52、在根据本发明的运输系统的一个实施例中,所述运输系统还包括用于控制所述运输系统的控制系统。利用该控制系统可以创建全自动系统。详细说明将进一步讨论建立这种控制系统的方法。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223675.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。