一种水下水动力实时预测方法及可变间距微沟槽减阻结构与流程
- 国知局
- 2024-08-01 06:24:55
本发明涉及水下减阻,尤其涉及一种水下水动力实时预测方法及可变间距微沟槽减阻结构。
背景技术:
1、在跨国运输中,海运承担着重要的任务。水中航行器的能耗的70%-80%都用于克服接触流体介质间阻力,大大限制了航行器的速度和续航能力。水中的主要阻力因素包括压差阻力、兴波阻力和表面摩擦力。现有技术条件下,压差阻力和兴波阻力在优化航行器的宏观形状结构下得到了大幅的降低,如巨轮的船首球鼻艏结构可减少兴波阻力。而表面摩擦力作为主要阻力因素,常常采用减阻微结构降低表面阻力,但是减阻微结构是固定的,适用工况较小,适应性较差。
2、公开号为cn103112547a提供了一种船舶表面的微孔射流减阻结构,其在吃水线以下的船舶表面设置导流槽,并在导流槽上覆盖多孔盖板或者船首网板,达到减小航行阻力的目的。但是导流槽的位置和形状是固定的,迎流表面的夹角是不变的,即对水下阻力的改善是有限的、不可变的,导致其适用范围较小。
3、综上所述,提供一种能对水下的水动力实时预测并相应改善迎流表面的夹角,适应性的改变阻力的水下水动力实时预测方法及可变间距微沟槽减阻结构,是非常必要的。
技术实现思路
1、有鉴于此,本发明提出了一种根据水下水动力实时状况预测后续时刻的水动力实时状况的预测方法及可变间距微沟槽减阻结构。
2、本发明的技术方案是这样实现的:一方面,本发明提供了一种水下水动力实时预测方法,包括如下步骤:
3、s1:构建深度u-net长短期记忆框架的算法架构;
4、s2:获取水下航行器流场仿真数据,并构建数据集;
5、s3:利用数据集,对步骤s1构建的所述深度u-net长短期记忆框架的算法架构进行训练;
6、s4:将完成训练并满足预期的深度u-net长短期记忆框架的算法架构,装配在水下航行器的信息处理单元,用于预测水下航行器前方流场,并解析得到前方流场对水下航行器产生的相对作用。
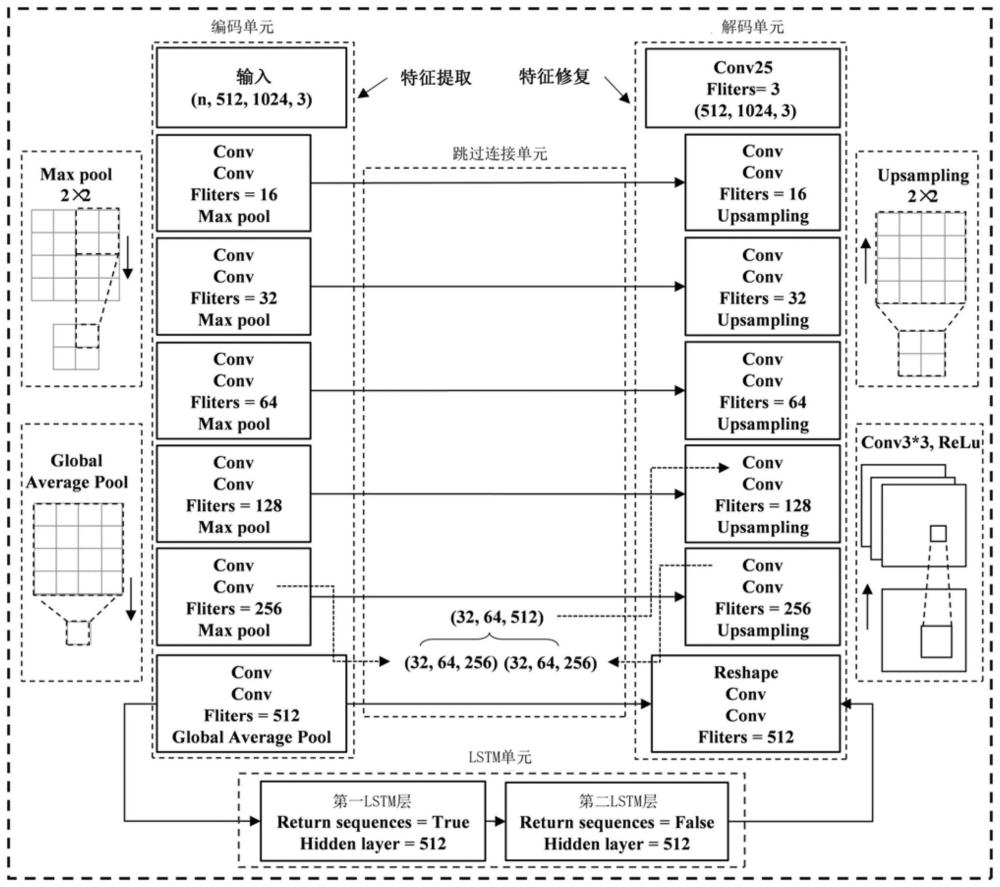
7、在以上技术方案的基础上,优选的,步骤s1中所述构建深度u-net长短期记忆框架的算法架构,包括编码单元、解码单元、lstm单元和跳过连接单元;编码单元用于对输入图像进行分割,并提取分割后的图像中的特征;lstm单元接收编码单元提取分割后的输入图像的特征,并提取顺序向量;解码单元通过跳过连接单元来获取编码单元提取分割后的输入图像的特征,并结合lstm单元输出的预测向量进行反卷积,得到输出图像。
8、优选的,所述编码单元包括顺次设置的第一输入环节、若干卷积环节和第一输出环节;若干卷积环节均包括顺次设置的两个卷积层、第一激活函数和最大池化层;第一输出环节包括顺次设置的两个卷积层、第二激活函数和全局平均池层。
9、优选的,所述解码单元包括第二输入环节、若干反卷积环节和第二输出环节;第二输入环节包括顺次设置的矩阵整形环节、两个卷积层和第三激活函数;若干反卷积环节均包括顺次设置的两个卷积层、第四激活函数和上采样层;第二输出环节包括顺次设置的卷积层和第四激活函数。
10、优选的,所述lstm单元包括两个顺次设置的lstm层,每个lstm层具有512个子隐藏层;第一lstm层用于从编码单元提取分割后的输入图像的特征中提取顺序向量,第二lstm层用于输出预测向量。
11、优选的,步骤s2中所述的获取水下航行器流场仿真数据,并构建数据集,是根据动力学原理分析水下航行器流场仿真数据,获得按时间顺序的水动力结果图像,将三个连续时刻的水动力结果图像作为一个顺序单元,将仿真数据中所获得的所有顺序单元构建数据集。
12、进一步优选的,步骤s3中所述利用数据集,对步骤s1构建的所述深度u-net长短期记忆框架的算法架构进行训练,是将每个顺序单元中的前两个连续时刻i和i+1对应的时序数据φ(i)和φ(i+1)作为输入序列,将该顺序单元中的第三个时刻i+2对应的时序数据φ(i+2)用于验证输出结果;通过输入时序数据φ(i)和φ(i+1),由深度u-net长短期记忆框架的算法架构输出预测时序数据,并将预测时序数据与第三个时刻i+2对应的时序数据φ(i+2)进行对比,根据对比结果调整深度u-net长短期记忆框架的算法架构的权重,通过训练后,输出最优的参数结果。
13、更进一步优选的,所述将预测时序数据与第三个时刻i+2对应的时序数据φ(i+2)进行对比,是采用均方误差作为损失函数,当损失函数取值最小时,认为深度u-net长短期记忆框架的算法架构输出预测时序数据的性能最好。
14、另一方面,本发明提供了一种可变间距微沟槽减阻结构,设置在水下航行器的迎流面,包括直线驱动单元、铰接形变单元和微槽减阻单元;铰接形变单元包括若干第一连接板和若干第二连接板,若干第一连接板和若干第二连接板相互交错设置且铰连接;位于起始端的第一连接板和第二连接板之间设置有直线驱动单元,各第一连接板和第二连接板的铰接部还与微槽减阻单元的不同位置的表面铰连接;直线驱动单元采用了深度u-net长短期记忆框架的算法架构,深度u-net长短期记忆框架的算法架构采用了权利要求1-8任一项所述的水下水动力实时预测方法进行预测,深度u-net长短期记忆框架的算法架构的输出预测使直线驱动单元的轴向长度发生改变,调节起始端的第一连接板和第二连接板之间的间距。
15、优选的,所述微槽减阻单元包括若干顺次连接的折板,相邻折板的端部铰连接设置,各折板的边缘分别与至少一个第一连接板和第二连接板的铰接点铰连接,相邻的折板之间的角度可调节。
16、本发明提供的一种水下水动力实时预测方法及可变间距微沟槽减阻结构,相对于现有技术,具有以下有益效果:
17、(1)本方案将事先构建的深度u-net长短期记忆框架的算法架构应用于水下水动力实时预测,使得水下航行器可以提前预测前方的流场信息,航行器可以适配最佳的运动状态;
18、(2)深度u-net长短期记忆框架的算法架构的预测结果可靠,相比传统cnn-lstm框架的算法架构,psnr结果显著提升,mse和mae分别降低至少一个数量级以上,水下水动力实时预测的计算时间成本可降低六个数量级;
19、(3)本方案的算法架构预置在直线驱动单元内,通过交变输出,使直线驱动单元发生形变,从而改变微槽减阻单元的各折板形成的沟槽的角度,实现微槽减阻单元的姿态的微调,最大程度降低水下阻力对航行器的影响。
技术特征:1.一种水下水动力实时预测方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种水下水动力实时预测方法,其特征在于,步骤s1中所述构建深度u-net长短期记忆框架的算法架构,包括编码单元、解码单元、lstm单元和跳过连接单元;编码单元用于对输入图像进行分割,并提取分割后的图像中的特征;lstm单元接收编码单元提取分割后的输入图像的特征,并提取顺序向量;解码单元通过跳过连接单元来获取编码单元提取分割后的输入图像的特征,并结合lstm单元输出的预测向量进行反卷积,得到输出图像。
3.根据权利要求2所述的一种水下水动力实时预测方法,其特征在于,所述编码单元包括顺次设置的第一输入环节、若干卷积环节和第一输出环节;若干卷积环节均包括顺次设置的两个卷积层、第一激活函数和最大池化层;第一输出环节包括顺次设置的两个卷积层、第二激活函数和全局平均池层。
4.根据权利要求2所述的一种水下水动力实时预测方法,其特征在于,所述解码单元包括第二输入环节、若干反卷积环节和第二输出环节;第二输入环节包括顺次设置的矩阵整形环节、两个卷积层和第三激活函数;若干反卷积环节均包括顺次设置的两个卷积层、第四激活函数和上采样层;第二输出环节包括顺次设置的卷积层和第四激活函数。
5.根据权利要求2所述的一种水下水动力实时预测方法,其特征在于,所述lstm单元包括两个顺次设置的lstm层,每个lstm层具有512个子隐藏层;第一lstm层用于从编码单元提取分割后的输入图像的特征中提取顺序向量,第二lstm层用于输出预测向量。
6.根据权利要求2所述的一种水下水动力实时预测方法,其特征在于,步骤s2中所述的获取水下航行器流场仿真数据,并构建数据集,是根据动力学原理分析水下航行器流场仿真数据,获得按时间顺序的水动力结果图像,将三个连续时刻的水动力结果图像作为一个顺序单元,将仿真数据中所获得的所有顺序单元构建数据集。
7.根据权利要求6所述的一种水下水动力实时预测方法,其特征在于,步骤s3中所述利用数据集,对步骤s1构建的所述深度u-net长短期记忆框架的算法架构进行训练,是将每个顺序单元中的前两个连续时刻i和i+1对应的时序数据φ(i)和φ(i+1)作为输入序列,将该顺序单元中的第三个时刻i+2对应的时序数据φ(i+2)用于验证输出结果;通过输入时序数据φ(i)和φ(i+1),由深度u-net长短期记忆框架的算法架构输出预测时序数据,并将预测时序数据与第三个时刻i+2对应的时序数据φ(i+2)进行对比,根据对比结果调整深度u-net长短期记忆框架的算法架构的权重,通过训练后,输出最优的参数结果。
8.根据权利要求7所述的一种水下水动力实时预测方法,其特征在于,所述将预测时序数据与第三个时刻i+2对应的时序数据φ(i+2)进行对比,是采用均方误差作为损失函数,当损失函数取值最小时,认为深度u-net长短期记忆框架的算法架构输出预测时序数据的性能最好。
9.一种可变间距微沟槽减阻结构,设置在水下航行器的迎流面,包括直线驱动单元(2)、铰接形变单元(3)和微槽减阻单元(1);铰接形变单元(3)包括若干第一连接板和若干第二连接板,若干第一连接板和若干第二连接板相互交错设置且铰连接;位于起始端的第一连接板和第二连接板之间设置有直线驱动单元(2),各第一连接板和第二连接板的铰接部还与微槽减阻单元(1)的不同位置的表面铰连接;其特征在于,直线驱动单元(2)采用了深度u-net长短期记忆框架的算法架构,深度u-net长短期记忆框架的算法架构采用了权利要求1-8任一项所述的水下水动力实时预测方法进行预测,深度u-net长短期记忆框架的算法架构的输出预测使直线驱动单元(2)的轴向长度发生改变,调节起始端的第一连接板和第二连接板之间的间距。
10.根据权利要求9所述的一种可变间距微沟槽减阻结构,其特征在于,所述微槽减阻单元(1)包括若干顺次连接的折板,相邻折板的端部铰连接设置,各折板的边缘分别与至少一个第一连接板和第二连接板的铰接点铰连接,相邻的折板之间的角度可调节。
技术总结本发明提出了一种水下水动力实时预测方法及可变间距微沟槽减阻结构,包括如下步骤:S1:构建深度U‑NET长短期记忆框架的算法架构;S2:获取水下航行器流场仿真数据,并构建数据集;S3:利用数据集,对步骤S1构建的所述深度U‑NET长短期记忆框架的算法架构进行训练;S4:将完成训练并满足预期的深度U‑NET长短期记忆框架的算法架构,装配在水下航行器的信息处理单元,用于预测水下航行器前方流场,并解析得到前方流场对水下航行器产生的相对作用。将预测结果配置在可变间距微沟槽减阻结构中,适应性的调整迎流面的形状,以适应当前水动力预测结果。技术研发人员:徐子祁,吴涛,李巧娇,吴佳峰,罗思琦,周小歆,牛帅受保护的技术使用者:中国船舶集团有限公司第七一九研究所技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223734.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。