一种搭载于水下机器人的重力牵引式自稳固装置的制作方法
- 国知局
- 2024-08-01 06:24:51
本发明涉及水下机器人,具体为一种搭载于水下机器人的重力牵引式自稳固装置。
背景技术:
1、我国内陆江河湖库水域中,水工建筑物众多,因水工阻水与雍水效应,水下场景强紊流、多相流以及激波频发。水下机器人在此类扰流作用下,易发生不同程度的倾斜、失稳,乃至倾覆,这会对平稳开展水工结构水下缺陷检测等探查工作带来不利影响,是需要引起重视的潜在因素。现有的水下机器人多需要技术人员操作调动螺旋桨或推进器、平衡翼或尾翼等部件运作来调整机身姿势,完成翻转动作,以实现机体平衡。
2、为使得检测工作更为便捷、高效,现有水下机器人常采用配备电池的方式供电,但在此类扰流出现时,若频繁启动螺旋桨或推进器等部件,易造成耗能过快、工作时间缩短等突发不利情况。且在应对不同程度扰流的冲击时,需要技术人员协调多部件运作,以达到水下机器人机体平衡,这使在短暂反应时间内完成准确作业具有相当大的难度;同时,因扰流引发的水体浑浊等环境因素干扰也易使得技术人员错失最佳排险时机。因此,若水下机器人机体能够依靠自身配置,在零电能损耗的情况下抵消绝大部分扰流冲击,稳固机体平衡,将具有重要意义。
3、为此提出一种搭载于水下机器人的重力牵引式自稳固装置来解决上述问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种搭载于水下机器人的重力牵引式自稳固装置,解决了现有水下机器人保持平稳耗能较高,不方便及时进行调整的问题。
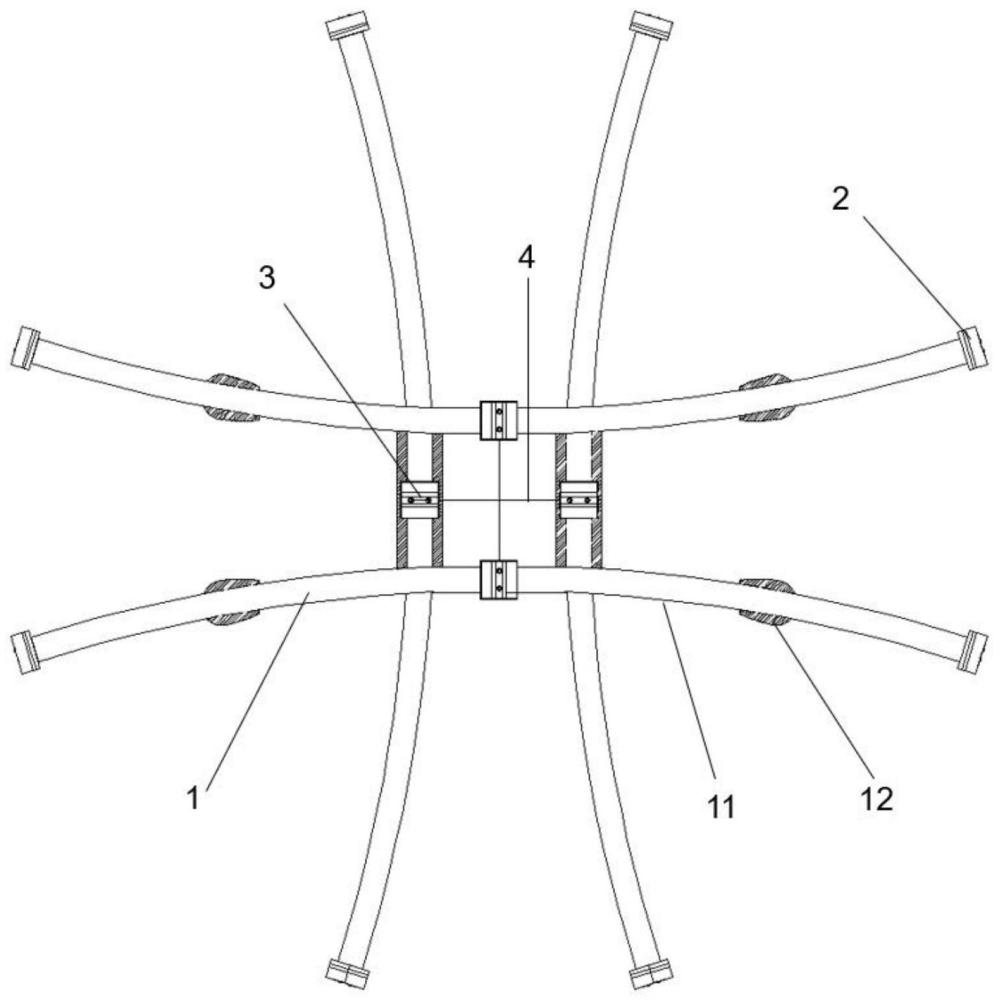
2、为实现以上目的,本发明通过以下技术方案予以实现:一种搭载于水下机器人的重力牵引式自稳固装置,包括多个导轨组件,所述导轨组件的两侧均设置有缓冲块,所述导轨组件的顶部滑动连接有滑动配重块,两个所述滑动配重块的相近一侧安装弹力牵引绳;
3、所述导轨组件包括导轨支座,所述导轨支座的顶部固定连接有导轨,所述导轨的底部开设有多个复合孔径空心孔,所述导轨组件的底部固定连接有多个倾斜磁石块,所述导轨的两侧均固定连接有缓冲块连接条;
4、所述缓冲块包括连接结构,所述连接结构的临近导轨一侧固定连接有减速海绵块,所述连接结构的临近导轨一侧顶部固定连接有磁石块一;
5、所述滑动配重块包括滑动块,所述滑动块的顶部固定连接有固定柱,所述滑动块的两侧设置有防尘片,所述滑动块的两侧均固定连接有牵引绳固定器,所述固定柱的外壁滑动连接有金属块,所述金属块的两侧均固定连接有磁石块二。
6、优选的,所述缓冲块连接条的内壁开设有螺孔一。
7、优选的,所述连接结构包括固定螺丝一,所述固定螺丝一螺纹连接在连接结构的一侧,所述连接结构的一侧开设有螺孔二。
8、优选的,所述滑动块的内壁顶部固定连接有多个倾斜磁石板。
9、优选的,所述滑动块的内壁两侧均固定连接有多个滚珠保持器,所述滚珠保持器的内壁设置有滚珠一,所述滑动块的中部固定连接有多个滚柱保持器,所述滚柱保持器的底部转动连接有滚柱,所述固定柱的顶部螺纹连接有六角螺母。
10、优选的,所述防尘片的一侧安装有多个固定螺丝二,所述固定螺丝二贯穿防尘片安装在滑动块的两侧。
11、优选的,多个所述滚珠一呈等距相对排列,所述滚珠一呈等距直线排列。
12、优选的,所述固定螺丝一螺纹连接在螺孔一的内壁,所述牵引绳固定器的外壁安装弹力牵引绳。
13、优选的,所述防尘片滑动连接在滑动块的两侧,与两端减速海绵块同侧。
14、优选的,所述导轨组件呈x型布置并呈双重曲度。
15、工作原理:静止状态下,两组子装置的滑动配重块均位于导轨中部最低处。当水下机器人遇激波扰流时,机体出现纵倾、横倾或不定向倾斜,滑动配重块在自身重力牵引下顺着导轨向机体倾斜低位一侧滑行。
16、俯视视角下,滑动配重块在通过导轨曲线段爬升时,经由设置在滑动块与导轨中的倾斜磁石板与倾斜磁石块之间的斥力作用,完成第一轮减速;当滑动配重块滑行至导轨末端时,受到布置在导轨末端的缓冲块斥力作用,并与减速海绵块接触,完成第二轮减速,最终在重力与牵引绳拉力作用下换向滑行。滑动配重块下滑时,因滑动块中倾斜磁石板的位置构造而不受磁石斥力作用。如此反复,直至恢复机体平衡。
17、本发明提供了一种搭载于水下机器人的重力牵引式自稳固装置。
18、具备以下有益效果:
19、1、本发明在运行过程中零电能消耗,利用滑动配重块自身重力牵引与磁石斥力作用实现水下机器人装置平衡复位,不额外损耗机体电能。
20、2、本发明维护方便、灵活,重物块、滑动块、缓冲块等部件均可根据实际使用情况拆卸更换。
21、3、本发明抗干扰能力强,在运行工作时,不受例如技术人员操作延时、判断失误,水环境浑浊不清,水压等外界因素影响。
22、4、本发明给出的“井”字形垂直布局,应变能力突出,根据水下机器人具体机体形状尺寸,可在一个机体内布置多个装置,或可选定合适套数的纵向或横向子装置进行组合使用,灵活性强。
技术特征:1.一种搭载于水下机器人的重力牵引式自稳固装置,包括多个导轨组件(1),其特征在于,所述导轨组件(1)的两侧均设置有缓冲块(2),所述导轨组件(1)的顶部滑动连接有滑动配重块(3),两个所述滑动配重块(3)的相近一侧安装弹力牵引绳(4);
2.根据权利要求1所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述缓冲块连接条(15)的内壁开设有螺孔一(151)。
3.根据权利要求1所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述连接结构(23)包括固定螺丝一(231),所述固定螺丝一(231)螺纹连接在连接结构(23)的一侧,所述连接结构(23)的一侧开设有螺孔二(232)。
4.根据权利要求1所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述滑动块(31)的内壁顶部固定连接有多个倾斜磁石板(311)。
5.根据权利要求1所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述滑动块(31)的内壁两侧均固定连接有多个滚珠保持器(322),所述滚珠保持器(322)的内壁设置有滚珠一(321),所述滑动块(31)的中部固定连接有多个滚柱保持器(324),所述滚柱保持器(324)的底部转动连接有滚柱(323),所述固定柱(33)的顶部螺纹连接有六角螺母(331)。
6.根据权利要求1所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述防尘片(34)的一侧安装有多个固定螺丝二(341),所述固定螺丝二(341)贯穿防尘片(34)安装在滑动块(31)的两侧。
7.根据权利要求5所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,多个所述滚珠一(321)呈等距相对排列,所述滚柱(323)呈等距直线排列。
8.根据权利要求3所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述固定螺丝一(231)螺纹连接在螺孔一(151)的内壁,所述牵引绳固定器(35)的外壁安装弹力牵引绳(4)。
9.根据权利要求1所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述防尘片(34)滑动连接在滑动块(31)的两侧,与两端减速海绵块(22)同侧。
10.根据权利要求1所述的一种搭载于水下机器人的重力牵引式自稳固装置,其特征在于,所述导轨组件(1)呈x型布置并呈双重曲度。
技术总结本发明涉及水下机器人技术领域,公开了一种搭载于水下机器人的重力牵引式自稳固装置,包括多个导轨组件,所述导轨组件的两侧均设置有缓冲块,所述导轨组件的顶部滑动连接有滑动配重块,两个所述滑动配重块的相近一侧安装弹力牵引绳;所述导轨组件包括导轨支座,所述导轨支座的顶部固定连接有导轨,所述导轨的底部开设有多个复合孔径空心孔,所述导轨组件的底部固定连接有多个倾斜磁石块,所述导轨的两侧均固定连接有缓冲块连接条;所述缓冲块包括连接结构,两个所述连接结构的相近一侧固定连接有减速海绵块。本发明在运行过程中零电能消耗,利用滑动配重块自身重力牵引与磁石斥力作用实现水下机器人装置平衡复位,不额外损耗机体电能。技术研发人员:范向前,邵浩栋,邹丽,赵新铭,于宗冰受保护的技术使用者:水利部交通运输部国家能源局南京水利科学研究院技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223728.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表