基于涡激运动拖曳式试验的测试装置及其测试方法与流程
- 国知局
- 2024-08-01 06:33:19
本发明涉及海洋平台试验,尤其是一种基于涡激运动拖曳式试验的测试装置及其测试方法。
背景技术:
1、深吃水立柱式海洋平台,例如spar、半潜平台、fpso等,经海上波浪和海流作用下,在一定的雷诺数范围内,水的粘性引起边界层分离并在主体结构后方产生周期性的旋涡脱落,涡脱落使主体后方压力降低,产生拖曳载荷导致结构流向运动,同时,由于涡脱落是在主体两侧交替进行,也产生垂直于流向的周期性震荡的升力,正是这种周期性激励的作用导致了海洋平台涡激运动的发生。
2、海洋平台的系泊系统允许平台做六个自由度的运动:纵荡、横荡、垂荡、纵摇、横摇和首摇。但是只有水平面内的位移,即横荡和纵荡是涡激运动的主导运动,涡激运动研究中通常设定平台纵荡方向与来流方向一致,而横荡方向为产生横向涡激运动的主要方向。在这种方向架构内,平台的横荡——即垂直流向的运动,以及纵荡——即顺流向的运动,是涡激运动研究中所应关注的主要问题。特别是横荡运动,一般情况下,旋涡脱落在横向所引起的运动幅值要比顺流向运动大,并且横向运动容易在一定条件下发生共振响应,因此横向运动是涡激运动研究中的焦点问题。涡激运动的响应幅值很大,周期较长,会增加锚链和立管的疲劳破坏,缩短总体疲劳寿命,增加结构物上的总阻尼,对于锚泊系统和立管设计来讲,海洋平台的涡激运动的估计显得尤为重要。
3、当前,涡激运动预报主要包括数值模拟与水池模型试验两种途径。由于涡激运动问题的复杂性和特殊性,数值模拟涉及到网格敏感度、边界层模拟、壁面影响、表面粗糙度、湍流模型等诸多问题,因此,水池试验仍然是最主要的研究途径。然而,由于系泊下的海洋平台在波浪和海流的作用下表现出了耦合效应,模型试验存在着诸多难点和挑战,主要表现在:
4、(1)海上作业的海洋平台通常由复杂的锚泊系统约束,如何简化为考虑多自由度运动的水平系泊系统则是涡激运动试验成功的关键;
5、(2)平台在波浪和流的作用下表现出复杂的空间运动,如何辨识和准确得到涡激运动主方向上的量化运动和载荷是关键。
6、目前,涡激运动模型试验研究多为小尺度模型,并在水槽中以简易尼龙绳或单个柔性小弹簧来实现,在较大模型中则采用定点造流的方式来模拟涡激运动,但是主要的问题是模拟的涡激运动雷诺数较低,是实际存在较大的误差。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种基于涡激运动拖曳式试验的测试装置及其测试方法,从而进行浮式结构物模型在波流中的涡激运动测试,大幅度提高涡激运动试验测试能力,推动海洋工程装备水动力专业的发展。
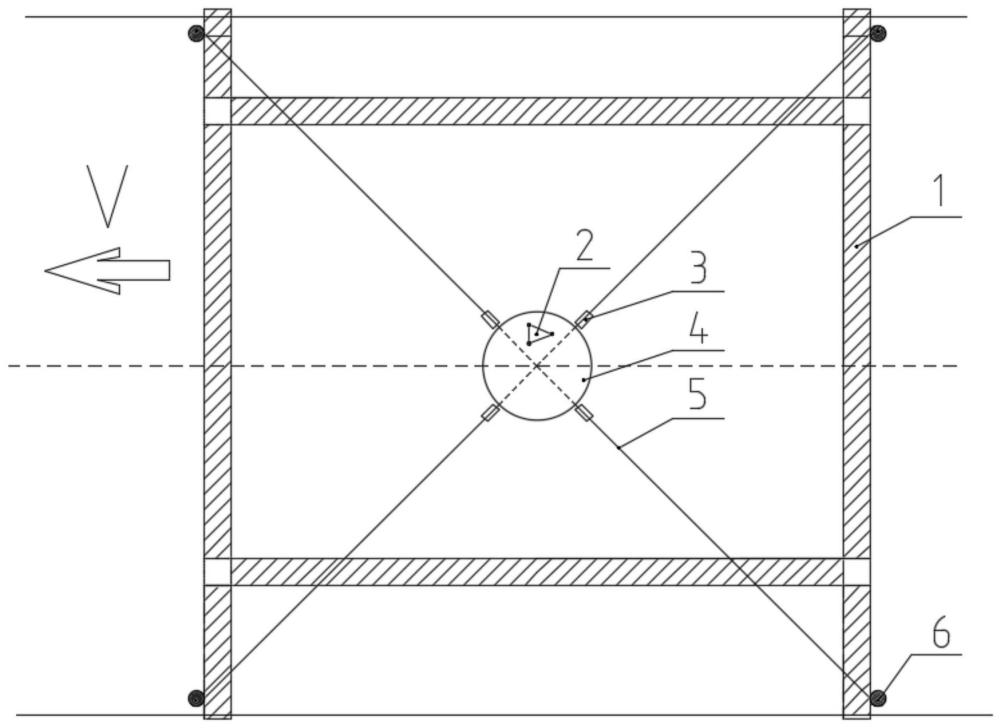
2、本发明所采用的技术方案如下:一种基于涡激运动拖曳式试验的测试装置,包括浮式结构物模型,所述浮式结构物模型位于水面上并沿周向布置多个单向力传感器,单个单向力传感器的一端固定在浮式结构物模型上,单向力传感器的另一端与轻质钢丝绳连接;所述轻质钢丝绳的另一端通过万向滑轮后连接弹簧组,轻质钢丝绳的尾端穿过桁架上的定滑轮后固定在支撑杆的系泊点上;在水面上设置拖车系统,浮式结构物模型与拖车系统匹配并位于拖车系统下方;所述浮式结构物模型上还安装有多自由度运动测量仪器。
3、作为上述技术方案的进一步改进:
4、优选的,所述单向力传感器在浮式结构物模型的外周分为四组并分别沿斜向45°的方向设置。
5、优选的,所述万向滑轮安装在支撑杆上,所述支撑杆固定于拖车系统的侧壁。
6、优选的,所述桁架安装在拖车系统的顶部。
7、优选的,所述拖车系统包括用于模拟流的拖曳系统和模拟波浪环境条件的造波系统。
8、一种基于涡激运动拖曳式试验的测试装置的测试方法,包括以下步骤:
9、步骤一:确定满足要求准确的弹簧组的刚度,得到满足整体水平刚度系数的等效系泊系统;
10、步骤二:通过拖车系统模拟流和波浪环境条件,使浮式结构物模型遭受波流作用;
11、步骤三:浮式结构物模型产生六自由度运动和沿布置方向的多组系泊力;
12、步骤四:根据步骤三测得数据,推导浮式结构物模型的水平方向合力,所述水平方向合力是纵向力和横向力。
13、优选的,步骤一中确定满足要求准确的弹簧组的刚度过程如下:
14、步骤一:根据浮式结构物模型的排水质量m、附加质量ma和浮式结构物模型在系泊系统下的纵荡固有周期t来决定涡激运动整体水平方向的刚度系数k,关系表示为:
15、
16、步骤二:整个系统平衡时上下左右对称,根据步骤一中得出的整体水平方向的刚度系数k以及浮式结构物模型的半径r、浮式结构物模型与万向滑轮之间的缆长l0、垂向距离y1和预张力f0对于平衡位置时缆与水平的夹角θ0之间的关系为:
17、
18、步骤三:浮式结构物模型(4)纵向位移δx时,轻质钢丝绳上缆长分别为l1和l2,缆上张力为f1和f2,此时水平方向合力δfx可表示为:
19、δfx=2(f1cosθ1-f2cosθ2)=k·δx
20、其中:
21、
22、
23、
24、
25、步骤四:根据步骤三中的关系式解得每组的弹簧组的刚度k0,并得到满足整体水平刚度系数k的等效系泊系统。
26、优选的,步骤四中推导浮式结构物模型的水平方向合力的推导过程如下:
27、步骤一:定义浮式结构物模型的重心为移动坐标系统的原点o-xyz,拖车系统为固定坐标系o-xyz;
28、步骤二:设浮式结构物模型在静水中平衡位置为初始零位,假定浮式结构物模型上下左右对称;
29、浮式结构物模型重心六自由度运动:g[x0,y0,z0,θ0,φ0,β0];
30、缆上初始张力为f0,初始缆长为l0,与水平夹角为
31、步骤三:当波流作用后,
32、浮式结构物模型重心实时六自由度运动:g’[xi,yi,zi,θi,φi,βi];
33、缆上实时张力为:f1i,f2i,f3i,f4i;
34、与水平实时夹角为:
35、步骤四:定义浮式结构物模型上的系缆点包括:点a(x1,y1,z1)、点b(x2,y2,z2)、点c(x3,y3,z3)、点d(x4,y4,z4),在受波流影响后,由固定坐标系与移动坐标系之间的转换矩阵j,可实时得到系缆点在固定坐标系下的位置量点a’(x1i,y1i,z1i)、点b’(x2i,y2i,z2i)、点c’(x3i,y3i,z3i)以及点d’(x4i,y4i,z4i);
36、步骤五:由实时系缆点位置a、b、c、d,再结合系缆点单向力传感器上分别实时得到的张力f1i,f2i,f3i,f4i,忽略z方向的运动并根据船舶运动规律,解算出水平方向纵向力fx和横向力fy。
37、本发明的有益效果如下:
38、本发明结构合理,试验过程操作方便,解决了浮式结构物模型在波流环境作用下运动和受力精确测量的问题,最终可精确得到模型涡激运动的幅值和受力特征,本发明整个测试装置简单,把复杂的空间系泊系统简化成4组包括弹簧组、单向力传感器以及轻质钢丝绳配合浮式结构物模型组成的水平系泊形式,通过改变桁架高度来确定钢丝绳和弹簧组的长短,通过改变系泊点位置或收缩钢丝绳的长短可调整弹簧系统的预张力大小,从而保证浮式结构物模型在波流作用下的最大空间位移量,实现快速调整系泊刚度与预张力,操作方便;
39、本发明还具有以下优点:
40、本发明的涡激运动分析方法简便,详细考虑了各系泊位置坐标偏差,易精确获得各运动和载荷。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224219.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表