一种用于舰船实时水下自动化补漏装置及使用方法
- 国知局
- 2024-08-01 06:35:52
本发明涉及舰船补漏的,尤其涉及一种用于舰船实时水下自动化补漏装置及使用方法。
背景技术:
1、舰船在航行过程中常常因触礁、碰撞,或在战争中由于导弹、水雷的爆炸导致船体破损,若不能实时高效地对破损处进行补漏,舰船无法及时行驶回船坞,从而发生沉船事故,造成严重的损失。
2、舰船的破损处实时维修难度较大,主要是由于以下几种情况:1、舰船破损情况复杂,破洞形状各异,大小不同;2、破洞的边缘不平整,具有卷边,补漏构件难以紧贴船体,密封性较差;3、破损处位于水下,具有一定水压以及水流的冲击力,对舰船的补漏工作造成困难;4、补漏工作主要由大量人员在甲板处及破损舱内操作,甚至需要派遣潜水人员水下实施补漏工作,自动化程度低,实施速度慢,且具有一定危险性。目前,主要的堵漏方法为采用帆布制的轻型堵漏毯以及采用钢索制的重型堵漏毯,依靠自身重力、与船体摩擦力以及水压力进行固定。但是因为船体的剧烈摇晃,使得破洞补漏处的定位困难,补漏密封性差,无法在舰船航行中实时补漏。
3、目前已有专利如申请号为201410673169.3的中国发明专利提出一种船体补漏箱,通过倒钩在破损处旋转进行固定,同时泄水阀进行减压,使得密封板具有较好的密封效果,但该装置不涉及舰船破损处的快速定位,人力将装置送至破洞处且使用也存在困难,影响补漏的实时性。而申请号为201410532872.2的中国发明专利提出一种船体补漏装置,采用弹撑式堵漏器和盖板在破洞两侧双重补漏,但该装置忽略了舰船洞口的复杂性,难以形成良好的密封,显著影响了补漏的效果。
4、针对舰船补漏,传统的补漏装置还存在以下不足之处:1、复杂破洞对密封性的考验较大;2、对补漏处的精确定位及补漏装置移动到破洞位置的过程耗时耗力;3、整个补漏工序自动化程度低,补漏效率受限,无法在舰船航行中实时完成高效补漏,使得舰船无法顺利驶至船坞实施进一步维修。因此,需要一种自动化高效的补漏装置,来解决以上问题。
技术实现思路
1、本发明针对现有技术存在的不足,提供一种用于舰船实时水下自动化补漏装置及使用方法。
2、本发明解决上述技术问题的技术方案如下:
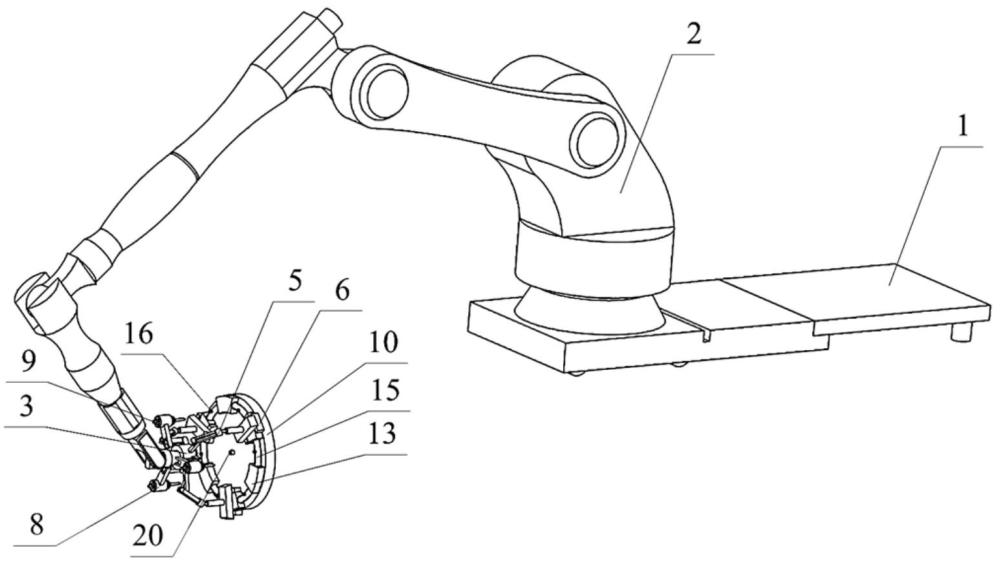
3、一种用于舰船实时水下自动化补漏装置,包括载物台,以及位于载物台上的机械臂,还包括补漏机构、末端执行器机构和气体压缩机构;
4、所述补漏机构包括盖板,所述盖板为柔性结构,用于封堵舰船上的破洞;所述盖板一侧设有施压结构,所述施压结构与末端执行器机构配合,用于对盖板施加压力;所述盖板另一侧设有粘合结构,粘合结构位于靠近船体的一侧设置,所述粘合结构与舰船破洞外围配合,用于将盖板位置初步固定;
5、所述末端执行器机构包括位于末端执行器外侧的机械爪和气动钢钉枪,所述末端执行器位于机械臂的端部,所述末端执行器的底端内部设有水下相机,用于监测并显示舰船破洞的具体情况;所述机械爪的末端连接有与施压机构配合的夹持块,以及用于调节控制机械爪施加力大小的力学传感器;当所述盖板位置固定后,所述气动钢钉枪用于发射钢钉将盖板固定,所述气动钢钉枪上设有充气嘴一;
6、所述气体压缩机构位于盖板的另一侧,用于充气状态时对舰船破洞位置的侧面进行支撑。
7、采用上述技术方案的技术效果为:水下相机连接有显示器,便于操作人员监测,通过水下相机定位舰船的破洞位置并反馈至显示器,夹持块夹紧弯块,通过力学传感器控制夹紧弯块的力的大小,控制盖板向破洞位置移动,并向破洞的中心位置挤压,粘合结构粘合在舰船破洞位置的外围,当盖板位置初步固定后,通过气动钢钉枪发射钢钉,将盖板与舰船固定,实现将破洞位置密封的目的;利用此装置对破洞位置进行补漏密封,不需要人工进行检查补漏,自动化程度高,能够实时高效完成补漏工作,确保舰船及时驶回船坞进行进一步的修复,减小损失。
8、进一步的,所述施压结构包括固设于盖板上方的弯块,所述弯块为金属材质,当所述夹持块夹紧弯块时,所述力学传感器与弯块的顶部紧密接触;所述弯块沿盖板的周向开设有通槽,所述通槽为弧形,所述通槽内设有充气橡胶圈,所述充气橡胶圈上设有多个充气嘴二。
9、进一步的,所述弯块设置有多个,多个所述弯块沿盖板的周向排布,且每个所述弯块为扇形结构。
10、进一步的,所述粘合结构包括设于盖板底部的环形槽道,所述环形槽道内设有粘合剂层,所述粘合剂层用于与舰船破洞外围的船体粘合,所述粘合剂层的外侧设有密封纸。
11、进一步的,所述粘合剂层为多羟基的非常规酚类聚合物粘合剂。
12、进一步的,所述气体压缩机构包括进气管,所述盖板的中心设有通孔,所述进气管向上贯穿通孔且与通孔的孔壁固定。
13、进一步的,所述气体压缩机构还包括腔体、固定架、复位弹簧、压缩腔和活塞杆;所述进气管与腔体连通,所述固定架位于腔体内,所述复位弹簧的一端连接于固定架的外侧,所述复位弹簧的另一端与活塞杆连接,所述活塞杆滑动于压缩腔内,且所述压缩腔与腔体连通,所述活塞杆远离复位弹簧的一端位于压缩腔的外部。
14、进一步的,所述活塞杆包括圆柱体和梯台,所述梯台位于压缩腔的外部,且所述梯台远离圆柱体的一端设有缓冲垫。
15、进一步的,所述机械爪以及气动钢钉枪均设置有三个,且呈120°夹角设置在末端执行器的外侧,所述夹持块设置有三组。
16、本发明还公开了一种用于舰船实时水下自动化补漏装置的使用方法,包括如下步骤:
17、s1:通过水下相机监测并定位舰船破洞位置,之后通过夹持块夹持弯块的侧壁,将充气嘴一、充气嘴二,以及进气管分别连接对应的空压机,并检查气密性;
18、s2:取下密封纸,通过机械臂控制盖板正对舰船的破洞位置,并将盖板向破洞中心挤压,通过力学传感器的反馈控制夹持块对弯块的压力,对充气嘴一、充气嘴二和进气管进行充气,气动钢钉枪沿末端执行器转动至接触盖板的表面,并发射钢钉将盖板与舰船固定,活塞杆沿压缩腔向外伸长,缓冲垫与破洞侧面贴合;
19、s3:完成盖板固定,夹持块松开弯块,机械臂复位。
20、综上所述,与现有技术相比,上述技术方案的有益效果是:
21、(1)本发明通过机械臂以及末端执行器内的水下相机,实现了破洞处的观察以及定位,具有速度快,无危险性,观察准确等优点,同时可准确选取合适大小的橡胶盖板进行补漏工作,该装置设计巧妙、可调控性高,各补漏系统相辅相成,自动化程度高,能够实时高效完成补漏工作,确保舰船及时驶回船坞进一步修复,减小损失;
22、(2)本发明通过柔性盖板对各种破洞具有良好的适应性,确保了粘合剂层与船体的充分接触;而钢制弯块和充气橡胶圈对盖板施加的压力,进一步保证了粘合剂层的贴合和粘接;充气钢钉枪在橡胶盖板边缘发射的钢钉能够将盖板进行固定,活塞杆的支撑能够从侧面将盖板进行固定,增加了补漏装置的密封性和稳定性,减少来自水压和水流的冲击力造成的干扰;
23、(3)本发明的一种用于舰船实时水下自动化补漏装置的使用方法,该方法基本不需要人工进行操作,智能化控制能够实时高效的完成补漏工作,简单便捷。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224454.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表