艏舵收回装置的制作方法
- 国知局
- 2024-08-01 06:39:49
本公开涉及水下潜航器,尤其涉及一种艏舵收回装置。
背景技术:
1、随着近些年水下无人体系的不断完备及技术突破,水下机器人在海洋研究与开发各领域的应用已经越来越广泛,无人潜航器作为体系当中最为重要的载体之一,世界各国在该领域不断持续扩大资金投入及研发力度,“大尺寸、大吨位”已然成为了当前水下无人潜航器的核心竞争力。但区别于传统潜艇来讲,无人潜器可以在某种意义上“以小搏大”,在同等吨位量级指标方面可以做到搭载更多的载荷装备,以此提升自身的作战、探测等能力。从来另一方面,作为无人装备来讲,理论上可以在任务执行过程当中,在安全设计要求范围值内,最大化的展现其灵活机动性,无需过多考虑对人的影响。
2、其中,水下潜航器在航行时一般配有尾舵进行转弯、上浮、下潜等动作,尾舵能给潜航器提供很好的稳定性,但潜航器进行这些操作时的机动性较差,目前对机动性要求较高的水下潜航器均配有艏舵,艏舵能极大的提高潜航器的机动性能,但增加一套艏舵整个潜航器的航行阻力会明显上升,所以艏舵需要在使用的时候展开,不使用时收回,尽可能的降低潜航器的航行阻力。
3、但现有技术中,左艏舵和右艏舵分别通过一个舵机实现展开和收回,占用空间大,容易在展开和收回的过程中出现左右两侧艏舵不同步,增大了整个潜航器的不稳定性。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了一种艏舵收回装置。
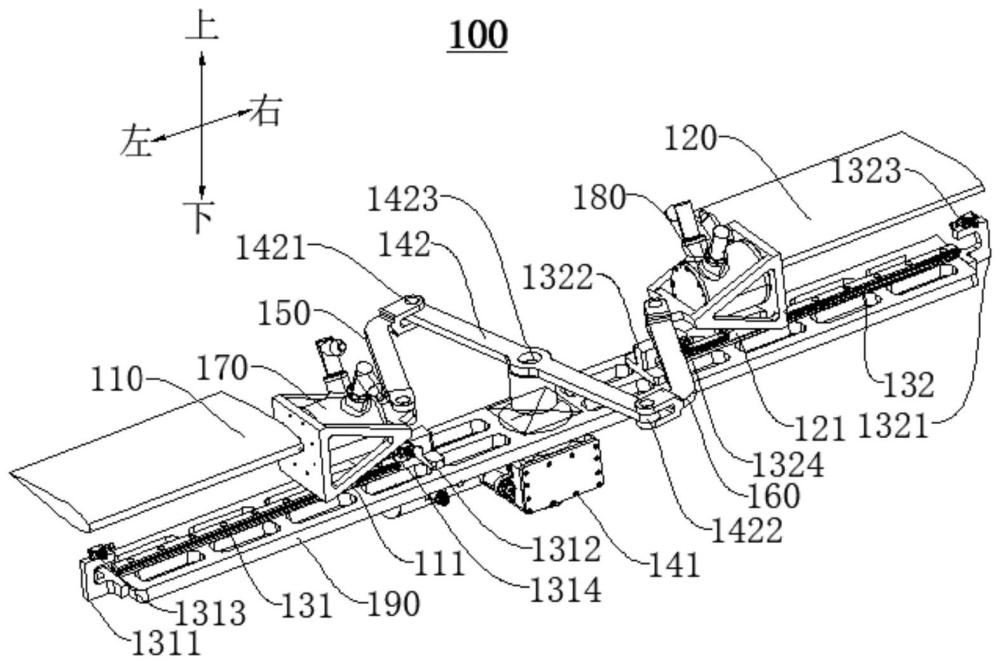
2、本申请公开了一种艏舵收回装置,该艏舵收回装置可以包括:左艏舵、右艏舵、导轨、驱动组件、左连动杆和右连动杆;导轨设置于潜航器,导轨包括第一导轨段和第二导轨段,第一导轨段和第二导轨段的延伸方向相同,左艏舵设于第一导轨段,并能沿第一导轨段的延伸方向滑动,右艏舵设于第二导轨段,并能沿第二导轨段的延伸方向滑动;驱动组件位于第一导轨段与第二导轨段之间,驱动组件包括旋转杆和驱动电机,旋转杆包括第一端、第二端和连接部,连接部位于第一端与第二端之间,连接部与驱动电机的输出轴连接;左连动杆的一端与左艏舵转动连接,另一端与第一端转动连接;右连动杆的一端与右艏舵转动连接,另一端与第二端转动连接。
3、这样一来,通过设置导轨可以限定左艏舵和右艏舵的运动轨迹,减少左艏舵和右艏舵在展开状态和收回状态的空间占用。同时,旋转杆可以同时带动左艏舵和右艏舵移动,进而保证左艏舵和右艏舵的同步收放,增大潜航器在航行过程中的稳定性。
4、在本申请的一些实施例中,所述左艏舵包括第一滑块,所述第一滑块与所述第一导轨段滑动配合;和/或,所述右艏舵包括第二滑块,所述第二滑块与所述第二导轨段滑动配合。
5、在本申请的一些实施例中,所述第一导轨段包括第一限位部和第二限位部,所述左艏舵在所述第一限位部与所述第二限位部之间滑动,所述左艏舵具有展开状态和收回状态;当所述左艏舵处于展开状态时,所述左艏舵与所述第一限位部抵接,当所述左艏舵处于收回状态时,所述左艏舵与所述第二限位部抵接。
6、在本申请的一些实施例中,艏舵收回装置还包括:第一限位传感器,所述第一限位传感器位于所述第一限位部,用于检测所述左艏舵是否处于展开状态。
7、在本申请的一些实施例中,艏舵收回装置还包括:第二限位传感器,所述第二限位传感器位于所述第二限位部,用于检测所述左艏舵是否处于收回状态。
8、在本申请的一些实施例中,所述第二导轨段包括第三限位部和第四限位部,所述右艏舵在所述第三限位部与所述第四限位部之间滑动,所述右艏舵具有展开状态和收回状态;当所述右艏舵处于展开状态时,所述右艏舵与所述第三限位部抵接,当所述右艏舵处于收回状态时,所述右艏舵与所述第四限位部抵接。
9、在本申请的一些实施例中,艏舵收回装置还包括:第三限位传感器,所述第三限位传感器位于所述第三限位部,用于检测所述右艏舵是否处于展开状态。
10、在本申请的一些实施例中,艏舵收回装置还包括:第四限位传感器,所述第四限位传感器位于所述第四限位部,用于检测所述右艏舵是否处于收回状态。
11、在本申请的一些实施例中,艏舵收回装置还包括:左驱动,所述左驱动与所述左艏舵传动连接,所述左驱动用于驱动所述左艏舵角度调节。
12、在本申请的一些实施例中,艏舵收回装置还包括:右驱动,所述右驱动与所述右艏舵传动连接,所述右驱动用于驱动所述右艏舵角度调节。
技术特征:1.一种艏舵收回装置(100),其特征在于,包括:
2.根据权利要求1所述的艏舵收回装置(100),其特征在于,所述左艏舵(110)包括第一滑块(111),所述第一滑块(111)与所述第一导轨段(131)滑动配合;
3.根据权利要求1所述的艏舵收回装置(100),其特征在于,所述第一导轨段(131)包括第一限位部(1311)和第二限位部(1312),所述左艏舵(110)在所述第一限位部(1311)与所述第二限位部(1312)之间滑动,所述左艏舵(110)具有展开状态和收回状态;
4.根据权利要求3所述的艏舵收回装置(100),其特征在于,还包括:
5.根据权利要求3所述的艏舵收回装置(100),其特征在于,还包括:
6.根据权利要求1所述的艏舵收回装置(100),其特征在于,所述第二导轨段(132)包括第三限位部(1321)和第四限位部(1322),所述右艏舵(120)在所述第三限位部(1321)与所述第四限位部(1322)之间滑动,所述右艏舵(120)具有展开状态和收回状态;
7.根据权利要求6所述的艏舵收回装置(100),其特征在于,还包括:
8.根据权利要求6所述的艏舵收回装置(100),其特征在于,还包括:
9.根据权利要求1所述的艏舵收回装置(100),其特征在于,还包括:
10.根据权利要求1所述的艏舵收回装置(100),其特征在于,还包括:
技术总结本申请涉及潜航器技术领域,提供了一种艏舵收回装置,该艏舵收回装置包括:左艏舵、右艏舵、导轨、驱动组件、左连动杆和右连动杆,导轨包括第一导轨段和第二导轨段,第一导轨段和第二导轨段的延伸方向相同,左艏舵设于第一导轨段,右艏舵设于第二导轨段;驱动组件包括旋转杆和驱动电机,旋转杆包括第一端、第二端和连接部,连接部位于第一端与第二端之间,连接部与驱动电机的输出轴连接;左连动杆的一端与左艏舵转动连接,另一端与第一端转动连接;右连动杆的一端与右艏舵转动连接,另一端与第二端转动连接。根据本实施例提供的艏舵收回装置,可以减少艏舵收回装置的空间占用,同时保证左艏舵和右艏舵的同步收放。技术研发人员:王冠博,何刚文,乔建毅,肖靖,马丽然,李小磊,伍德民受保护的技术使用者:季华实验室技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/224696.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表