一种水下探测机器人
- 国知局
- 2024-08-01 06:47:51
本技术涉及水下探测设备,具体的,涉及一种水下探测机器人。
背景技术:
1、水库安全度汛一直是我国防汛抗洪的难点和重点,中小型水库的安全度汛已成为当前全国防汛工作的一个薄弱环节,水坝的安全检查工作越来越受到人们的重视,水坝附近水情复杂,依靠潜水员进行检测工作会受到很大的限制,检测结果往往很不理想。现有的水下探测机器人普遍为无线遥控式,而这种操作方式使得水下探测机器人在水下作业出现故障时,往往没有良好的应急处理方案。
2、现有专利申请号cn202021903065.4公开了一种水下探测机器人,包括主体和上浮气囊,所述主体左端嵌入有强化玻璃,且强化玻璃内部安装有检测摄像头,所述主体表面开设有安装槽,且安装槽内部连接有安装块,所述安装块另一端连接有驱动桨,且驱动桨外端连接有照明灯,所述驱动桨顶部连接有外框,且外框内部安装有螺旋桨,所述螺旋桨底部连接有驱动设备,所述主体右侧连接有连接块。该水下探测机器人通过上浮气囊、导管、电子阀门与储气罐之间的相互配合设置,使其当该装置在水下发生故障时,通过外部遥控设备打开电子阀门,使其储气罐中的气体通过导管导入上浮气囊中,使上浮气囊扩张,顶出该装置顶部的盖板将该装置上浮至水面,提升了该装置的实用性。
3、上述方案在实施过程中存在以下不足,由于水坝的深处可能会有水草和废弃物等杂物,探测机器人在水下时很可能会被这些杂物困住驱动浆,从而使得上浮气囊无法继续上浮,因此影响到对探测机器人的打捞工作,为此需要一种水下探测机器人来解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种水下探测机器人,解决现有技术中由于水坝的深处可能会有水草和废弃物等杂物,探测机器人在水下时很可能会被这些杂物困住驱动浆,从而使得上浮气囊无法继续上浮,因此影响到对探测机器人的打捞工作的问题。
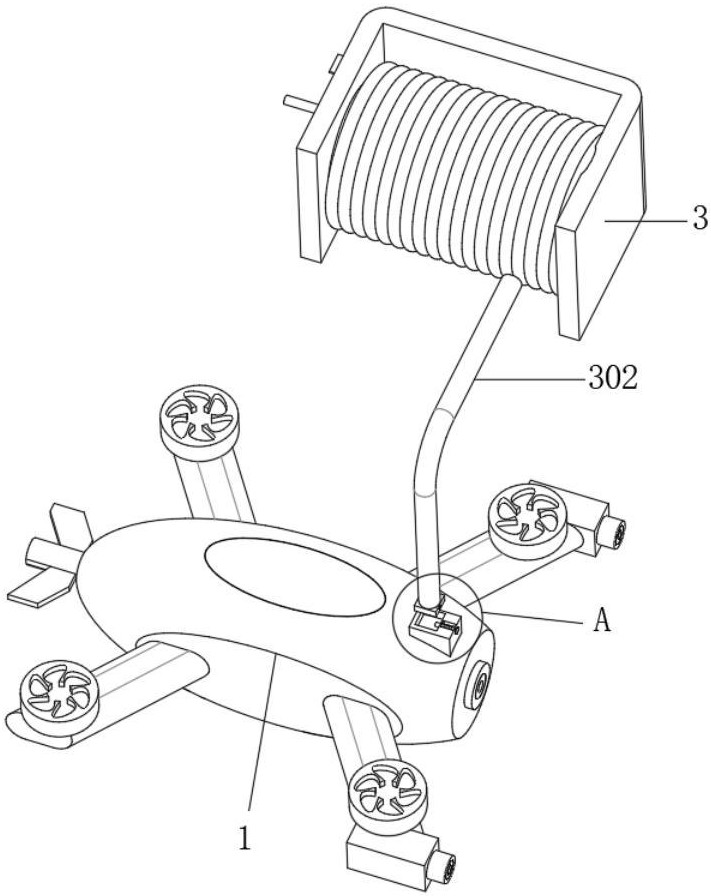
2、本实用新型提供如下技术方案:一种水下探测机器人,包括探测机器人,所述探测机器人的内部安装有上浮设备,所述探测机器人的顶端固定连接有固定板,所述固定板的顶端开设有插槽,所述插槽的侧端间隔开设有安装槽,所述安装槽的内部设有固定机构,所述插槽的内部安装有打捞机构,所述打捞机构包括连接组件,所述连接组件的侧端设有收卷组件,所述收卷组件的侧端设有限位组件。
3、作为上述技术方案的优选,所述固定机构包括插杆,所述插杆插设至安装槽内,所述插杆的外端固定连接有矩形板,所述插杆的侧端固定连接有圆板,所述插杆的外端套设有弹簧一。
4、作为上述技术方案的优选,所述连接组件包括拉绳,所述拉绳的尾端固定连接有插板,所述插板的侧端开设有插孔,所述插孔与插杆相适配,所述拉绳安装在收卷组件的外端。
5、作为上述技术方案的优选,所述收卷组件包括固定架,所述固定架的内侧转动设置有收卷轮,所述拉绳收卷设置在收卷轮的外端,所述收卷轮的侧端固定连接有转板,所述转板的侧端固定连接有若干个齿牙,所述转板的侧端固定连接有手轮。
6、作为上述技术方案的优选,所述固定架的侧端开设有弧形槽。
7、作为上述技术方案的优选,所述限位组件包括转杆,所述转杆转动设置在固定架的侧端,所述转杆的外端固定连接有拨片,所述拨片的侧端固定连接有按板,所述按板的顶端固定连接有凸起,所述固定架的侧端固定连接有侧板,所述侧板的底端与拨片的顶端之间固定连接有弹簧二。
8、作为上述技术方案的优选,所述拨片的侧端固定连接有固定杆,所述固定杆的端头位于弧形槽内。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型通过打捞机构的设置,通过探测机器人可以在水下进行探测工作,通过探测机器人内部设置有上浮设备,通过遥控器可控制上浮设备自动充气,从而实现上浮,当探测机器人被水草和废弃物困住驱动浆时,此时通过转动手轮后,转板和齿牙转动顶着拨片不停上移,拨片不停顶着弹簧二进行收缩,从而可实现对拉绳进行收卷,从而可通过借拉绳的力将水下的探测机器人打捞上来,此时实现了上浮设备无法上浮使用的情况下,也能够通过备用的打捞机构对探测机器人进行打捞,避免影响到对探测机器人的打捞工作,当探测机器人打捞上来后,可不再转动手轮,此时因探测机器人的重力下垂,可带动拉伸下垂,而此时就会带动转板和齿牙发生转动,齿牙就会抵在拨片的上方,此时固定杆也会在弧形槽内的最低端,从而实现对齿牙的限位,对探测机器人的位置进行固定,避免其向下坠落,此时通过拉动圆板后,圆板带动插杆和矩形板移动,此时矩形板抵压弹簧一进行收缩,而插杆离开插孔内,此时就可将插板拿出插槽内,从而可便于将探测机器人从拉绳上进行拆卸。
技术特征:1.一种水下探测机器人,包括探测机器人(1),所述探测机器人(1)的内部安装有上浮设备(101),其特征在于:所述探测机器人(1)的顶端固定连接有固定板(102),所述固定板(102)的顶端开设有插槽(103),所述插槽(103)的侧端间隔开设有安装槽(104),所述安装槽(104)的内部设有固定机构,所述插槽(103)的内部安装有打捞机构,所述打捞机构包括连接组件,所述连接组件的侧端设有收卷组件,所述收卷组件的侧端设有限位组件。
2.根据权利要求1所述的一种水下探测机器人,其特征在于:所述固定机构包括插杆(2),所述插杆(2)插设至安装槽(104)内,所述插杆(2)的外端固定连接有矩形板(201),所述插杆(2)的侧端固定连接有圆板(202),所述插杆(2)的外端套设有弹簧一(203)。
3.根据权利要求1所述的一种水下探测机器人,其特征在于:所述连接组件包括拉绳(302),所述拉绳(302)的尾端固定连接有插板(3021),所述插板(3021)的侧端开设有插孔(3022),所述插孔(3022)与插杆(2)相适配,所述拉绳(302)安装在收卷组件的外端。
4.根据权利要求3所述的一种水下探测机器人,其特征在于:所述收卷组件包括固定架(3),所述固定架(3)的内侧转动设置有收卷轮(301),所述拉绳(302)收卷设置在收卷轮(301)的外端,所述收卷轮(301)的侧端固定连接有转板(303),所述转板(303)的侧端固定连接有若干个齿牙(304),所述转板(303)的侧端固定连接有手轮(305)。
5.根据权利要求4所述的一种水下探测机器人,其特征在于:所述固定架(3)的侧端开设有弧形槽(306)。
6.根据权利要求3所述的一种水下探测机器人,其特征在于:所述限位组件包括转杆(4),所述转杆(4)转动设置在固定架(3)的侧端,所述转杆(4)的外端固定连接有拨片(401),所述拨片(401)的侧端固定连接有按板(402),所述按板(402)的顶端固定连接有凸起(403),所述固定架(3)的侧端固定连接有侧板(405),所述侧板(405)的底端与拨片(401)的顶端之间固定连接有弹簧二(406)。
7.根据权利要求6所述的一种水下探测机器人,其特征在于:所述拨片(401)的侧端固定连接有固定杆(404),所述固定杆(404)的端头位于弧形槽(306)内。
技术总结本技术涉及水下探测设备技术领域,公开了一种水下探测机器人,包括探测机器人,所述探测机器人的内部安装有上浮设备,所述插槽的内部安装有打捞机构,所述打捞机构包括连接组件,所述连接组件的侧端设有收卷组件,所述收卷组件的侧端设有限位组件,本技术通过打捞机构的设置,当探测机器人被水草和废弃物困住驱动浆时,此时通过转动手轮后,转板和齿牙转动顶着拨片不停上移,拨片不停顶着弹簧二进行收缩,从而可实现对拉绳进行收卷,从而可通过借拉绳的力将水下的探测机器人打捞上来,此时实现了上浮设备无法上浮使用的情况下,也能够通过备用的打捞机构对探测机器人进行打捞,避免影响到对探测机器人的打捞工作。技术研发人员:朱子衡,王尔馥,邹佳林,石路加,张宪伟,陈语情,吕志欣,史立涓,陈轩铭受保护的技术使用者:黑龙江大学技术研发日:20240123技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/225076.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表