一种用于水下的对接回收机器人
- 国知局
- 2024-08-01 06:47:36
本发明属于水下回收相关,更具体地,涉及一种用于水下的对接回收机器人。
背景技术:
1、水下航行器在海洋探索过程中占有重要地位,随着水下航行器的不断发展,其在水下作业后的安全对接回收问题日益凸显,现有的水下对接回收形式主要包括捕捉杆类或绳索式、锥形导向罩式、平台落座式等。
2、捕捉杆类或绳索式回收形式是在水下航行器上安装捕捉杆、绳或者类似形状的回收机构,这种方式可以在水下实现360°全方位回收,定位精度要求不高,可靠性较高。但这种回收方式的水下对接回收平台的结构复杂,并且还需要对水下航行器在结构上进行较大改动。
3、锥形导向罩式回收形式的对接回收部分主要由锥形导向罩和套筒组层,锥形导向罩上安装有水声定位系统,实现水下航行器的定位导航,这类水下对接回收平台优点是结构相对简单,水下航行器所需的改动较小,锥形导向罩对水下航行器具有较好的引导能力,对接成功后可以为水下航行器提供安全可靠的栖息平台,缺点是只适用于特定尺寸的水下航行器且要求水下航行器有较好的可操纵性和运动控制能力,对接只能朝着特定方位对接,对接过程易受海洋环境影响,容易产生对接失误甚至导致回收任务失败,并且对接时冲击碰撞比较严重。
4、平台落座式回收形式适用于水下或海底平面型回收平台,对接成功率比较高,水中平台的结构比较简单,适用于一系列的悬停式水下航行器,水下航行器和回收平台的接触面积较大,有利于非接触的电能传送和数据交换。缺点是对水下航行器的动力系统和自导系统有较高的要求,且水下航行器需携带捕捉机构,对水下航行器改动较大,并且水下航行器需要适配设计。
5、并且现有的装置大多是刚性抓取,为了准确抓取,需要较大夹持力度,对被抓对象会产生表面损伤,因此,亟需设计一种适用于水下适配性广的柔性抓取装置。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种用于水下的对接回收机器人,可以实现对水下航行器的柔性抓取,对接时没有冲击碰撞,不需要对水下航行器进行特定对接功能改装,进一步的还可适用于不同尺寸的水下物体,水下物体只需要携带usbl声学定位系统,对接时悬停在某一位置,通过控制本发明的对接回收机器人,便可对水下航行器进行对接回收,不会对回收物体造成损伤,同时普适性强。
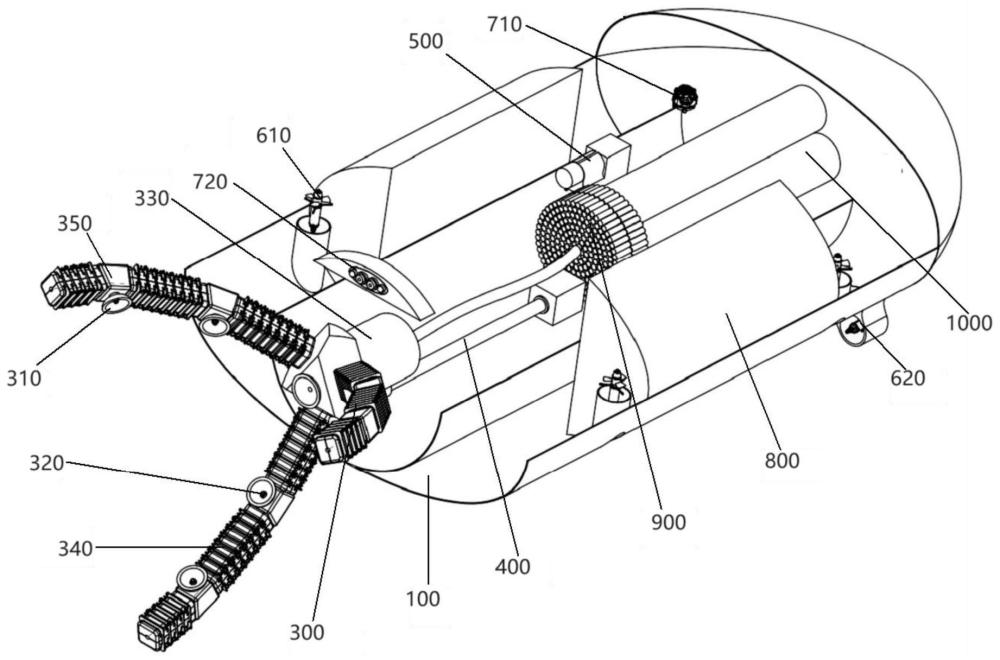
2、为实现上述目的,按照本发明的一个方面,提供了一种用于水下的对接回收机器人,包括壳体、定位系统、抓取爪、伸缩机构以及抽水泵,其中:所述定位系统设于所述壳体的表面,用于定位待回收水下物体的位置;所述伸缩机构设于所述壳体的内部,所述伸缩机构的一端与所述抓取爪连接,用于将所述抓取爪推出和缩进所述壳体内部;所述抓取爪包括多个柔性爪臂,每个柔性爪臂上设有至少一个吸盘,所述柔性爪臂设有气体腔室,所述气体腔室与气缸连接,通过充气和排气控制所述柔性爪臂的形状进行抓取,所述吸盘设有中心设有接近开关,所述接近开关用于识别吸盘与待回收水下物体的距离;所述抽水泵与所述吸盘连接,用于在吸盘吸附时抽取吸盘中的存水。
3、优选的,所述柔性爪臂包括多个依次连接的小臂,每个小臂的内侧和外侧均设有气体腔室,内侧和外侧的气体腔室相互独立。
4、优选的,所述气体腔室包括多个依次贯通的气体小腔室,气体小腔室和气体小腔室之间设有肋板,沿小臂轴向上的多个肋板之间通过弹簧串联。
5、优选的,所述吸盘设于小臂与小臂的连接处,各吸盘之间相互独立。
6、优选的,所述柔性爪臂的数量为3个,每个柔性爪臂包括3个依次连接的小臂。
7、优选的,所述定位系统包括声学定位系统和水下双目视觉系统,所述声学定位系统包括多个声学单元,多个声学单元分布在所述壳体的周围。
8、优选的,所述伸缩机构为滚珠丝杠。
9、优选的,还包括推进器,所述推进器包括水平推进器和垂直推进器。
10、总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的用于水下的对接回收机器人主要具有以下有益效果:
11、1.本申请的对接回收机器人,抓取爪设置柔性爪臂,其上设置吸盘和抽水泵,可以实现对水下物体的柔性抓取,对接时没有冲击碰撞,可适用于不同尺寸的水下物体,例如航行器,只需要水下航行器上装备usbl声学定位系统,对接时悬停在某一位置,通过控制本发明的对接回收机器人,便可对水下航行器进行对接回收,不需要对水下航行器进行其他特定对接功能的改装,不会对回收物体造成损伤,同时普适性强。
12、2.本申请的柔性爪臂由多个依次连接的小臂组成,小臂的内侧和外侧均设有气体腔室,通过气体柔性控制抓取,不会对待抓取物体造成损伤。
13、3.小臂和小臂之间设有吸盘,吸盘内部设置接近开关和抽水泵,可以在接近物体时实现精准抓取,抽水泵可以抽取吸盘内的水分,保证抓取时的吸力,可以实现大重量物体的抓取。
14、4.所述定位系统包括声学定位系统和水下双目视觉系统,可以精准的识别待回收物体的位置。
技术特征:1.一种用于水下的对接回收机器人,其特征在于,包括壳体(100)、定位系统、抓取爪(300)、伸缩机构(400)以及抽水泵(500),其中:
2.根据权利要求1所述的对接回收机器人,其特征在于,所述柔性爪臂包括多个依次连接的小臂(340),每个小臂(340)的内侧和外侧均设有气体腔室(341),内侧和外侧的气体腔室(341)相互独立。
3.根据权利要求2所述的对接回收机器人,其特征在于,所述气体腔室(341)包括多个依次贯通的气体小腔室(345),气体小腔室(345)和气体小腔室(345)之间设有肋板(347),沿小臂(340)轴向上的多个肋板(347)之间通过弹簧(348)串联。
4.根据权利要求2或3所述的对接回收机器人,其特征在于,所述吸盘(310)设于小臂(340)与小臂(340)的连接处,各吸盘(310)之间相互独立。
5.根据权利要求2或3所述的对接回收机器人,其特征在于,所述柔性爪臂的数量为3个,每个柔性爪臂包括3个依次连接的小臂。
6.根据权利要求1所述的对接回收机器人,其特征在于,所述定位系统包括声学定位系统(710)和水下双目视觉系统(720),所述声学定位系统(710)包括多个声学单元,多个声学单元分布在所述壳体的周围。
7.根据权利要求1所述的对接回收机器人,其特征在于,所述伸缩机构(400)为滚珠丝杠。
8.根据权利要求1所述的对接回收机器人,其特征在于,还包括推进器,所述推进器包括水平推进器(620)和垂直推进器(610)。
技术总结本发明属于水下回收相关技术领域,其公开了一种用于水下的对接回收机器人,包括壳体、定位系统、抓取爪、伸缩机构以及抽水泵,其中:定位系统设于壳体的表面,用于定位待回收水下物体的位置;伸缩机构设于壳体的内部,伸缩机构的一端与所述抓取爪连接;抓取爪包括多个柔性爪臂,每个柔性爪臂上设有至少一个吸盘,柔性爪臂设有气体腔室,气体腔室与气缸连接,通过充气和排气控制柔性爪臂的形状进行抓取,吸盘设有中心设有接近开关;抽水泵与吸盘连接,用于在吸盘吸附时抽取吸盘中的存水。本申请可在一定水深下对各类水下航行器实现主动抓取对接,无需对被抓取的航行器进行特定对接功能的改造,被抓取对象还可以扩充为其他不同尺寸的水下物体。技术研发人员:傅晓云,彭宇轩,李宝仁,张建星,董石榴,袁畅,杨钢,高隆隆,杜经民受保护的技术使用者:华中科技大学技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/225064.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表