一种海底自主拾取机器人
- 国知局
- 2024-08-01 07:02:33
本发明涉及海洋机器人,尤其是涉及一种海底自主拾取机器人。
背景技术:
1、目前现有技术仍存在以下不足:1)无人潜航器的使用需要受成本和水下通信技术的制约,有时为了执行深海海底调查和采样任务,通常需要遥控潜水器(rov)和带有动态定位系统(dps)的大型研究船(rv)。然而,这种安排的总成本超出了大多数中型研究项目的预算计划。2)由于水下通信尚未发生任何重大革命,大多数无人潜航器都会发送系绳进行视频传输,控制车辆,有时甚至是电力传输,而ctd绞盘系统也给水下系统的设计带来了制约,包括水下系统在空中和水中的重量必须小于1000公斤;绞盘电缆没有电源或功率有限;操作深度受电缆长度的限制;数字通信的有效性以非线性方式受电缆长度的影响,rov通过系留电缆进行车辆和地面计算机之间的供电和数据交换,系留电缆的存在将rov限制在有限的应用中,并使其容易受到障碍物的影响,作业范围有限。且如果目标点位附近泥沙较软,并且rov降速不及时,rov的螺旋桨会吹起大量泥沙,rov须等待泥沙消散,并且画面清晰后才能继续后续操作,严重影响施工效率。3)国内能够开展深水安装作业的施工单位很少,故难以采用国外观测网的定位布放手段。国内在深海作业条件下,采用钢丝绳吊放方案,钢丝绳长度可达数千米。当吊放设备近海底时,由于涌浪及海流的共同作用,吊放状态水下设备的摆动幅度可达十多米,无法完成精准定点布放作业。4)海底机器人的建造和维护的成本很高,当机器人变得稍微庞大一点时,便需要额外的人力和机械设备,系统的运行和操作成本将随之上升,这也限制了海底机器人的使用范围。
技术实现思路
1、本发明的目的是提供一种海底自主拾取机器人,解决了现有技术成本高、施工效率低、定位数据不连续、更新不及时、定位精度不可控和适应能力差的问题。
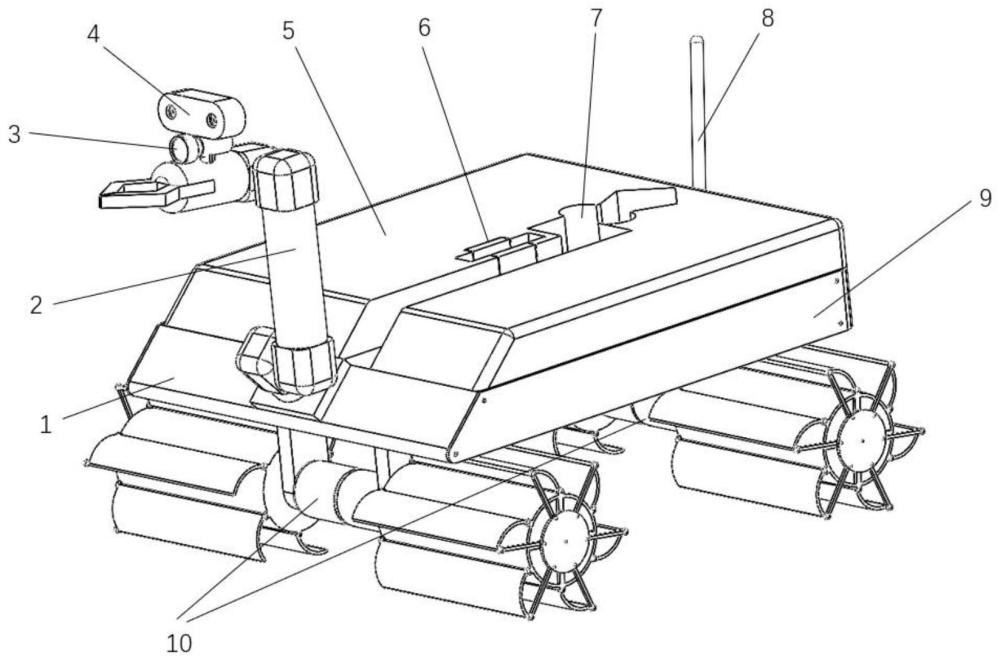
2、为实现上述目的,本发明提供了一种海底自主拾取机器人,包括车体外壳、位于车体外壳上方的浮力块和位于车体外壳两侧的外壳侧翼挡板,车体外壳一端的中央处活动设置有机械臂结构,车体外壳另一端的中央处电性连接有通信天线,车体外壳的内部套设有舱体结构,车体外壳的底部安装有驱动结构。
3、优选的,机械臂结构包括水下机械臂,水下机械臂通过转轴活动安装在车体外壳外表面中央处,水下机械臂的顶端安装有水下照明灯和水下摄像机。
4、优选的,浮力块的中央处开设有与水下机械臂相适配的机械臂回收槽,机械臂回收槽的一侧开设有设备固定锁扣。
5、优选的,设备固定锁扣包括固定底座和活动锁舌,活动锁舌位于浮力块正上方,活动锁舌的下端与车体外壳相连接,活动锁舌用于穿过加工在固定底座中心的光轴的中心孔。
6、优选的,舱体机构包括天线倾斜基座,天线倾斜基座外部两侧均开设有电池放置舱,且电池放置舱通过外壳侧翼挡板进行固定与密封,每个电池放置舱两侧均开设有气瓶放置舱。
7、优选的,驱动机构包括水下电机与驱动舵机,水下电机的外壳固定于车体外壳下方固定座,转子通过法兰座与车轮外壳相连接,水下电机转动带动车轮旋转,车轮内部为进行浮力调节的气仓,气仓远离车体的一端为推水页驱动舵机,驱动舵机作为旋转车轮内部的一部分,仅用于驱动推水页展开或闭合,驱动舵机与水下电机无直接相联的传动装置,驱动舵机被固定于车轮外壳外端十字固定架上,驱动舵机旋转轴与旋转圆盘相连接,旋转圆盘设置有若干环绕圆心的通孔,每个通孔与辐条推杆的一端转动连接,每个辐条推杆的另一端与活动推水页活动连接,每个活动推水页通过浮力调节式车轮外壳上的轴承孔进行两端固定。
8、优选的,浮力调节式车轮外壳为滚筒状结构。
9、优选的,活动推水页为弧形页结构。活动推水页通过浮力调节式车轮外壳转轴孔进行两端固定,一侧与辐条推杆相联,辐条推杆活动时,与之相联的活动推水页与浮力调节式车轮外壳之间的夹角则会改变。
10、因此,本发明采用上述结构的一种海底自主拾取机器人,具备以下有益效果:
11、(1)本发明采用轮式可调浮力仓进行整体浮力调整,最大程度上节省能源消耗,延长作业时间和增大作业能力,且采用的气瓶与电池更换便捷,通过短时间维护便可持续作业。
12、(2)本发明不受系留电缆等外部连接设备制约,作业半径更大;与海底行进机器人相比,本发明非单一海底爬行运动状态,能以悬浮或爬行两种状态运动,且利用轮式可调浮力仓提供的浮力不同,控制车体进行全方向角度调整,跨越障碍能力更强与地形适应通过能力更强。
13、(3)本发明从设备购置成本、运行成本、维护成本等综合考虑,优化设备购置、运行和维护成本,实施标准化和模块化设计,优化供应链管理,以及采用最新的技术提高效率等。
14、(4)本发明实现了在水中运动并对海洋设备进行拾取,车轮内部气仓能够实现浮力大小的调节,车轮外壳活动推水页可由舵机进行角度调节,在潜航状态时开启推水页,推水页的夹角不同推水能力不同,四驱车轮也可实现每个车轮的单独转速控制,使其车体运动更加灵活,需要在海底进行运动时,推水页由舵机控制全部闭合,从而实现在海底底质上运动。该机器人由于推进噪音低,具有低功耗高静音的特点,潜航时间长和续航能力强,可对特定海域进行高精度大范围的设备布放和回收观测,能有效提高海洋环境下的工作效率,是现有水下作业手段的有效补充。
15、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:1.一种海底自主拾取机器人,其特征在于:包括车体外壳、位于车体外壳上方的浮力块和位于车体外壳两侧的外壳侧翼挡板,车体外壳一端的中央处活动设置有机械臂结构,车体外壳另一端的中央处电性连接有通信天线,车体外壳的内部套设有舱体结构,车体外壳的底部安装有驱动结构。
2.根据权利要求1所述的一种海底自主拾取机器人,其特征在于:机械臂结构包括水下机械臂,水下机械臂通过转轴活动安装在车体外壳外表面中央处,水下机械臂的顶端安装有水下照明灯和水下摄像机。
3.根据权利要求2所述的一种海底自主拾取机器人,其特征在于:浮力块的中央处开设有与水下机械臂相适配的机械臂回收槽,机械臂回收槽的一侧开设有设备固定锁扣。
4.根据权利要求3所述的一种海底自主拾取机器人,其特征在于:设备固定锁扣包括固定底座和活动锁舌,活动锁舌位于浮力块正上方,活动锁舌的下端与车体外壳相连接,活动锁舌用于穿过加工在固定底座中心的光轴的中心孔。
5.根据权利要求1所述的一种海底自主拾取机器人,其特征在于:舱体机构包括天线倾斜基座,天线倾斜基座外部两侧均开设有电池放置舱,且电池放置舱通过外壳侧翼挡板进行固定与密封,每个电池放置舱两侧均开设有气瓶放置舱。
6.根据权利要求5所述的一种海底自主拾取机器人,其特征在于:驱动机构包括水下电机和驱动舵机,水下电机的外壳固定于车体外壳下方固定座,转子通过法兰座与车轮外壳相连接,水下电机转动带动车轮旋转,车轮内部为进行浮力调节的气仓,气仓远离车体的一端为推水页的驱动舵机,驱动舵机作为旋转车轮内部的一部分,仅用于驱动推水页展开或闭合,驱动舵机与水下电机无直接相联的传动装置,驱动舵机被固定于车轮外壳外端十字固定架上,驱动舵机旋转轴与旋转圆盘相连接。
7.根据权利要求6所述的一种海底自主拾取机器人,其特征在于:浮力调节式车轮外壳为滚筒状结构。
8.根据权利要求7所述的一种海底自主拾取机器人,其特征在于:活动推水页为弧形页结构。
技术总结本发明公开了一种海底自主拾取机器人,属于海洋机器人技术领域。包括车体外壳、位于车体外壳上方的浮力块和位于车体外壳两侧的外壳侧翼挡板,车体外壳一端的中央处活动设置有机械臂结构,车体外壳另一端的中央处电性连接有通信天线,车体外壳的内部套设有舱体结构,车体外壳的底部安装有驱动结构。本发明提供的一种海底自主拾取机器人,在最大程度上节省能源消耗,延长作业时间和增大作业能力,采用的气瓶与电池更换便捷,通过短时间维护便可持续作业。能以悬浮或爬行两种状态运动,且利用轮式可调浮力仓提供的浮力不同,控制车体进行全方向角度调整,跨越障碍能力更强与地形适应通过能力更强。技术研发人员:吴迪,冯伟峰,孙天艺受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/225826.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表