一种0.75m微型无人测绘船的制作方法
- 国知局
- 2024-08-01 07:04:17
本技术涉及水上作业无人船,尤其涉及一种0.75m微型无人测绘船。
背景技术:
1、无人船是一种高集成度的水面航行机器人,一般是通过远程遥控或ai航行程序的方式进行控制,借助定位系统和传感系统便可按照预设好的航线在水面上工作,同步可以开展水域环境监测、人员搜救等活动。adcp为声学多普勒流速剖面仪,是二十世纪90年代初发展起来的一种新型测流设备。它利用多普勒效应原理进行流速测量。adcp因其原理的优越性,突破传统机械转动为基础的传感流速仪,用声波换能器作传感器,换能器发射声脉冲波,声脉冲波通过水体中不均匀分布的泥沙颗粒、浮游生物等反散射体反散射,由换能器接收信号,经测定多普勒频移而测算出流速。其具有不扰动流场、测验历时短、测速范围大等特点。
2、现有测绘船搭载多种测绘设备,体型较大,且由于大型船体组装复杂,船体拆装耗费的时间长,且在一些小型河道,大型测绘无人船体难以通过,鉴于此,本领域技术人员设计了便于模块化进行拆装的一种0.75m微型无人测绘船。
技术实现思路
1、本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种便于拆装和使用的0.75m微型无人测绘船。
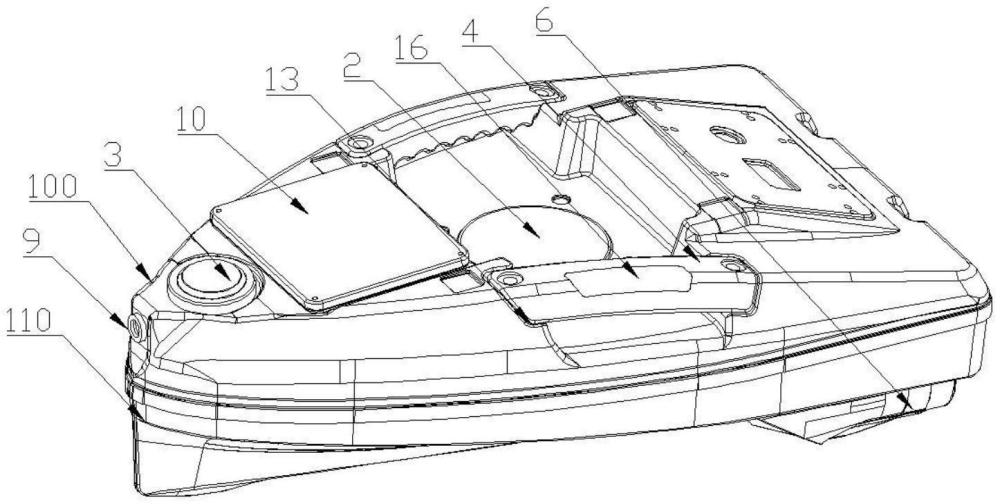
2、本实用新型的技术方案为:一种0.75m微型无人测绘船,包括船体,所述船体包括上船体和与所述上船体扣装的下船体,所述船体的中部贯穿设置有设备搭载孔,所述上船体上表面前侧设置有gps,所述船体两侧可拆卸设置有把手件,所述船体的内部装设有船控和安装腔体,所述安装腔体内可拆卸设置有电池模组,所述船体的底部设置有拆装槽,所述拆装槽的内壁上横向设置有安装座,所述船体在所述安装座上可拆卸设置有推进器模块,所述推进器模块包括推进器和设置在所述推进器上的连接组件,所述推进器通过所述连接组件与所述安装座配合在所述拆装槽内,所述推进器与所述电池模组电性连接。
3、由上述方案可知,所述设备搭载孔用于搭载探测水域的设备,用于无人船在水域上进行测绘,便于无人船在航行,所述gps和探测设备,实现对航行的水域进行探测和记录,从而实现水域航线的导航测绘,所述船控对所述摄像头和探测设备进行控制,实现自动化,所述电池为所述推进器供能,所述推进器和所述电池实现在所述船体上的模块化安装,便于携带和拆装。
4、所述连接组件包括设置在所述推进器上的连接板,所述连接板的内侧设置有与所述安装座扣装配合的旋转套筒,所述旋转套筒内壁上设置有凸键,所述安装座内设置有若干插孔,所述连接板在所述旋转套筒内设置与所述插孔适配的插件,所述安装座的外圆周壁上设置有与所述凸键适配的键槽。由此可见,所述推进器通过连接组件实现在船体上的模块化拆装,所述插孔与插座适配实现连接组件在安装座上的插合连接,所述键槽与所述凸键配合实现推进器在安装座上的卡位固定,所述旋转套筒用于实现旋转解除卡位锁定。
5、所述安装腔体的内壁上设置有导向槽,所述电池模组外套设有电池壳体,所述电池壳体的外壁上设置有导向块,所述导向块与所述导向槽滑动配合,所述电池壳体端部设置有拿取手柄,所述拿取手柄上设置有按压键,所述电池壳体内设置有与所述按压键电性连接的电磁锁扣,所述电磁锁扣输出端上设置扣块,所述安装腔体上设置有与所述扣块对应的限位孔,所述安装腔体在所述限位孔的上方设置有安装塞。由此可见,所述电池壳体通过所述导向块与所述导向槽的滑动配合实现模块化安装,通过所述电磁锁扣与所述按压键的联动实现一键式扣装,所述电磁锁扣通过按下按压键的实现扣块在所述限位孔内的收缩和伸出。
6、所所述船体两侧的端部设置有凹陷部,所述把手件的两端配合在所述凹陷部内,所述凹陷部内设置有第一连接孔,所述把手件的两侧设置有第二连接孔,所述第一连接孔和所述第二连接孔配合后插设有安装螺丝。由此可见,所述第一连接件和第二连接件用于实现所述把手件在所述船体的凹陷部上的模块化安装。
7、所述设备搭载孔内可为走航式adcp或者多波束探测仪。由此可见,所述走航式adcp用于测水域的流速,所述多波束探测仪可以用于测水域深度,所述摄像头用于检测水域情况。
8、所述把手件内装设有灯片,所述把手在所述灯片上罩设有透明灯罩,所述把手件的底部设置有波浪状凹槽。由此可见,所述灯片用于在航行时进行显示,便于船体的识别,所述波浪状凹槽便于对把手件的抓握。
9、所述船体前端设置有摄像头,所述船体的底部并列设置有两条导流槽。由此可见,所述摄像头用于感应船体前方路障距离,所述导流槽用于实现导流,保障船体在水域上的航行平稳。
10、所述船体的长度为0.75m。由此可见,所述船体为0.75m的微型模块化无人船,用于在狭窄河道内航行使用。
技术特征:1.一种0.75m微型无人测绘船,包括船体(1),其特征在于:所述船体(1)包括上船体(100)和与所述上船体(100)扣装的下船体(110),所述船体(1)的中部贯穿设置有设备搭载孔(2),所述上船体(100)上表面前侧设置有gps(3),所述船体(1)两侧可拆卸设置有把手件(4),所述船体(1)的内部装设有船控(10)和安装腔体(11),所述安装腔体(11)内可拆卸设置有电池模组(5),所述船体(1)的底部设置有拆装槽(12),所述拆装槽(12)的内壁上横向设置有安装座(7),所述船体(1)在所述安装座(7)上可拆卸设置有推进器模块,所述推进器模块包括推进器(6)和设置在所述推进器(6)上的连接组件,所述推进器(6)通过所述连接组件(8)与所述安装座(7)配合在所述拆装槽(12)内,所述推进器(6)与所述电池模组(5)电性连接。
2.根据权利要求1所述的一种0.75m微型无人测绘船,其特征在于:所述连接组件(8)包括设置在所述推进器(6)上的连接板(81),所述连接板(81)的内侧设置有与所述安装座(7)扣装配合的旋转套筒(82),所述旋转套筒(82)内壁上设置有凸键(83),所述安装座(7)内设置有若干插孔(71),所述连接板(81)在所述旋转套筒(82)内设置与所述插孔(71)适配的插件,所述安装座(7)的外圆周壁上设置有与所述凸键(83)适配的键槽(72)。
3.根据权利要求1所述的一种0.75m微型无人测绘船,其特征在于:所述安装腔体(11)的内壁上设置有导向槽(111),所述电池模组(5)外套设有电池壳体(51),所述电池壳体(51)的外壁上设置有导向块(52),所述导向块(52)与所述导向槽(111)滑动配合,所述电池壳体(51)端部设置有拿取手柄(53),所述拿取手柄(53)上设置有按压键(54),所述电池壳体(51)内设置有与所述按压键(54)电性连接的电磁锁扣,所述电磁锁扣输出端上设置扣块,所述安装腔体(11)上设置有与所述扣块对应的限位孔,所述安装腔体(11)在所述限位孔的上方设置有安装塞(112)。
4.根据权利要求1所述的一种0.75m微型无人测绘船,其特征在于:所述船体(1)两侧的端部设置有凹陷部(13),所述把手件(4)的两端配合在所述凹陷部(13)内,所述凹陷部(13)内设置有第一连接孔,所述把手件(4)的两侧设置有第二连接孔(41),所述第一连接孔和所述第二连接孔(41)配合后插设有安装螺丝。
5.根据权利要求1所述的一种0.75m微型无人测绘船,其特征在于:所述设备搭载孔(2)内可为走航式adcp或者多波束探测仪。
6.根据权利要求4所述的一种0.75m微型无人测绘船,其特征在于:所述把手件(4)内装设有灯片,所述把手件(4)在所述灯片上罩设有透明灯罩(16),所述把手件(4)的底部设置有波浪状凹槽(42)。
7.根据权利要求1所述的一种0.75m微型无人测绘船,其特征在于:所述船体(1)前端设置有摄像头(9),所述船体(1)的底部并列设置有两条导流槽(15)。
8.根据权利要求1所述的一种0.75m微型无人测绘船,其特征在于:所述船体(1)的长度为0.75m。
技术总结本技术涉及水上作业无人船技术领域,公开了一种0.75m微型无人测绘船,包括船体,所述船体包括上船体和与所述上船体扣装的下船体,所述船体的中部贯穿设置有设备搭载孔,所述上船体上表面前侧设置有GPS,所述船体两侧可拆卸设置有把手件,所述船体的内部装设有船控和安装腔体,所述安装腔体内可拆卸设置有电池模组,所述船体的底部设置有拆装槽,所述拆装槽的内壁上横向设置有安装座,所述船体在所述安装座上可拆卸设置有推进器模块,所述推进器模块包括推进器和设置在所述推进器上的连接组件,所述推进器通过所述连接组件与所述安装座配合在所述拆装槽内,所述推进器与所述电池模组电性连接。技术研发人员:刘华明,何理,乔馨仪,王文浩受保护的技术使用者:珠海市极航科技有限公司技术研发日:20231214技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/225963.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表