用于水隧道检查的机器人及其系统的制作方法
- 国知局
- 2024-08-01 07:04:12
本申请涉及用于检查隧道的装置和系统。更具体地,本披露涉及用于水隧道检查的机器人及其系统。
背景技术:
1、地下水隧道(water tunnel)是城市基础设施的组成部分,负责确保污水处理厂的污水安全排放到环境中,不对公众健康或生态系统造成损害。如果水隧道无法正常运行,未经处理的污水可能会弄脏水道,污染周围环境,并对人类和动物健康构成重大风险。此外,地下水隧道是水资源管理的关键组成部分,确保处理后的污水有效地分配到其目的地,同时最大限度地减少对环境的影响。因此,对地下水隧道进行适当的维护和定期检查对于确保其有效操作至关重要,并促进创新和工程解决方案对环境可持续性的重要性。
2、在技术发展之前,人类(即人工检查)是检查地下水隧道的主要手段。这个过程极其危险,因为需要使用安全线连接将个人下放到隧道中,以目视检测任何问题。然而,由于隧道内比如存在危险气体或挥发性水流等未知状况,且紧急情况下逃生困难,这种方法风险很大。随着技术的进步,尝试用遥控车辆进行水隧道检查,但由于水隧道内的恶劣环境和未知状况,比如照明较差和杂质,在长隧道检查中遇到了各种问题。并且入口点等有限。因此,非常需要能够确保隧道检查的安全性和效率、在检查过程中无需人工操作的替代解决方案。
技术实现思路
1、鉴于前述背景,在某些实施例中,目的是提供一种不倒翁式机器人检查系统,其是专门设计用于解决检查水隧道的挑战的尖端解决方案。在某些实施例中,该系统由被设计为在高速水流中无缝移动的不倒翁式机器人、以及释放与收回系统组成或包括不倒翁式机器人、以及释放与收回系统。在检查过程中,使用释放与收回系统将机器人从入口点释放。
2、相应地,一方面,提供了一种用于水隧道检查的机器人,包括:
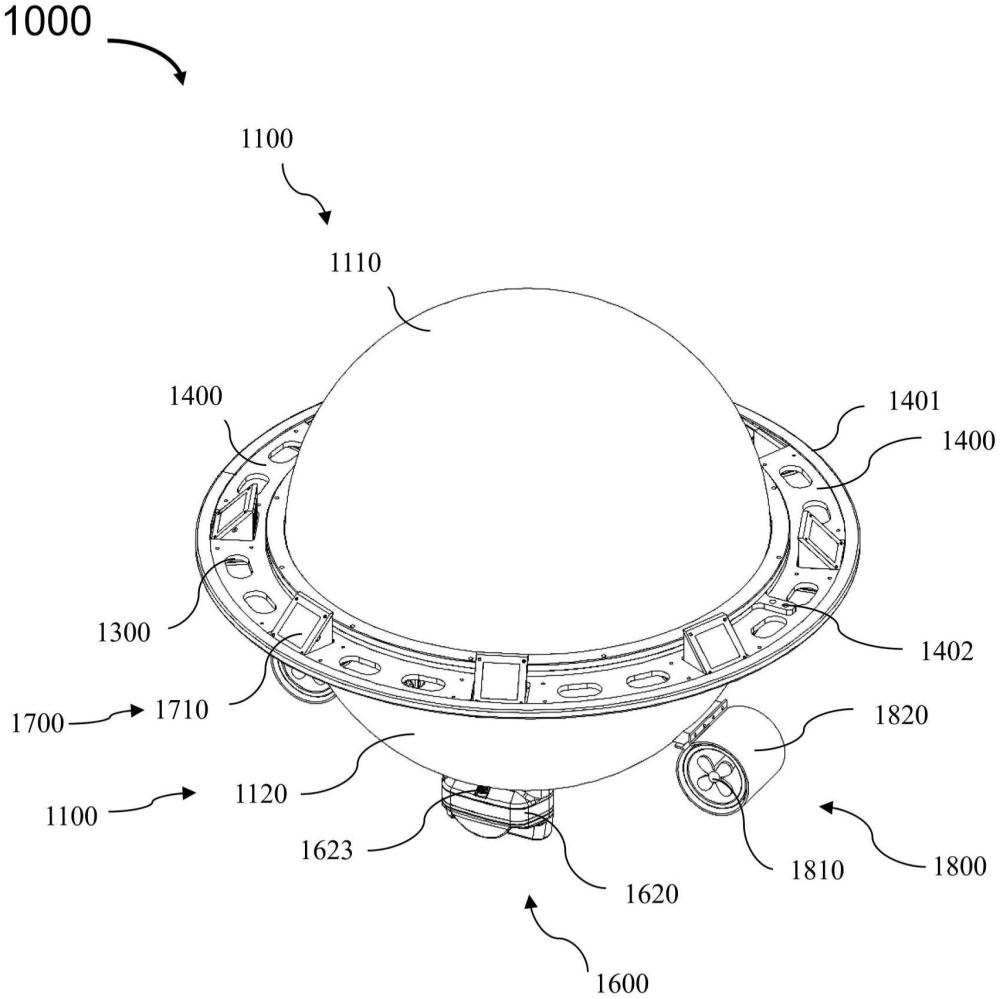
3、壳体、相机系统、照明系统、推进系统、以及控制系统。壳体包括上壳体和下壳体。上壳体和下壳体的尺寸和形状设置为彼此匹配,从而在其内共同限定封闭空腔。相机系统被配置为捕获周围环境的视场的图像或视频。照明系统被配置为至少部分地为视场提供照明。推进系统被配置为向水中的机器人提供推进力。控制系统被配置为提供机器人的动力和控制操作。机器人被配置为漂浮在水上并且重心的位置低于几何中心,使得在操作期间,上壳体的至少一部分基本上保持在水面上方,并且下壳体的至少一部分基本上保持在水下。
4、另一方面,提供了一种用于水隧道检查的系统,该系统包括根据前述权利要求中任一项所述的机器人;以及释放与收回系统,被配置为将机器人释放到水隧道以及从水隧道收回机器人。
5、下面将描述其他示例实施例。
6、本披露有许多优点。在某些实施例中,所提供的装置及其系统被设计为自主工作,无需人工操作,因为装置及其系统可以在恶劣的地下水隧道环境中操作并提供准确且详细的检查数据,而不会将任何人的生命置于风险下。
7、在某些实施例中,所提供的装置及其系统提供确保稳定性的独特设计,具有防止装置卡在隧道或沉积物中的弧形结构以及防止装置甚至在未知的环境中翻转的低重心。在某些实施例中,相机系统模块的特征是提供隧道的高分辨率视频记录的全景相机和云台稳定器,而相机的三重稳定系统确保视频捕获稳定。
8、在某些实施例中,一旦完成检查,就使用收回系统来收回机器人,在收回系统中可以使机器人恢复以用于下一次任务。
9、在某些实施例中,不倒翁式机器人及其检查系统为水隧道检查提供了全面且高效的解决方案,比传统检查方法更安全、更可靠且更省时。
10、在某些实施例中,不倒翁式机器人及其检查系统代表了水隧道检查的突破性解决方案,利用创新且高效的数据收集能力,而不需要人工操作或有线连接。在某些实施例中,系统模块的无缝集成有效地克服了传统检查方法的局限性,同时提高了检查的安全性和效率。在某些实施例中,系统可靠且高效的检查能力使得能够及早识别潜在问题,有助于及时维护并最大限度地降低环境危害的风险。凭借其开创性的设计和先进的特征,在某些实施例中,不倒翁式机器人检查系统为检查技术树立了新标准,为城市及以外地区的更安全、更清洁、更健康的环境铺平了道路。
11、在某些实施例中,机器人的内部部件协同工作以使不倒翁式机器人能够在水隧道环境中执行高效且可靠的检查,从而提供有价值的数据并有助于关键基础设施的维护和安全性。
12、在某些实施例中,所提供的释放与收回(rr)系统通过使得用于水隧道检查的不倒翁式机器人能够安全且高效地操作来确保机器人的隧道检查成功。rr系统使机器人能够安全地下降到隧道中进行检查,然后在完成后收回到地面。通过实施稳固且可靠的rr系统,在某些实施例中,机器人可以用于收集准确且高质量的数据,以识别隧道中的缺陷或问题,最终确保污水处理设施的安全高效操作。该系统确保机器人能够以受控且安全的方式操作,从而最大限度地降低机器人或隧道本身损坏的风险。
技术特征:1.一种用于水隧道检查的机器人,其特征在于,所述机器人包括:
2.如权利要求1所述的机器人,其特征在于,所述机器人进一步包括与所述控制系统操作性地连接的惯性测量单元imu。
3.如权利要求1所述的机器人,其特征在于,所述上壳体是至少部分透明的。
4.如权利要求1所述的机器人,其特征在于,所述下壳体的密度高于所述上壳体的密度。
5.如权利要求1所述的机器人,其特征在于,所述相机系统进一步包括:
6.如权利要求1所述的机器人,其特征在于,所述机器人进一步包括图像稳定系统,所述图像稳定系统与所述相机系统操作性地连接以提高所述图像的稳定性。
7.如权利要求6所述的机器人,其特征在于,所述相机系统进一步包括
8.如权利要求1所述的机器人,其特征在于,所述控制系统进一步包括供电系统和处理单元。
9.如权利要求8所述的机器人,其特征在于,所述供电系统包括可再充电电池和电压调节器。
10.如权利要求1所述的机器人,其特征在于,所述推进系统进一步包括附接在所述下壳体上的水下马达。
11.如权利要求10所述的机器人,其特征在于,所述水下马达与电子速度控制器操作性地连接。
12.如权利要求1所述的机器人,其特征在于,所述机器人进一步包括底板,所述底板的尺寸和形状设置为与所述壳体附接。
13.如权利要求12所述的机器人,其特征在于,所述照明系统进一步包括多个设置在所述底板上的led模块。
14.如权利要求13所述的机器人,其特征在于,单独led模块包括led阵列、散热器以及防水led壳体。
15.如权利要求1所述的机器人,其特征在于,所述壳体的整体形状是基本上球形的。
16.一种用于水隧道检查的不倒翁式机器人,其特征在于,所述不倒翁式机器人包括:
17.一种用于水隧道检查的系统,其特征在于,所述系统包括:
18.如权利要求17所述的系统,其特征在于,所述释放与收回系统包括:
19.如权利要求18所述的系统,其特征在于,所述升降框架被配置为可相对于所述主框架在上位置与下位置之间切换,使得所述机器人分别从所述水隧道被提升或朝所述水隧道下降。
20.如权利要求18所述的系统,其特征在于,所述主框架被配置为可在工作位置与准备位置之间相对于所述滑轨轨道切换,使得所述机器人分别移动更靠近或远离所述水隧道。
技术总结在一些实施例中,提供了一种用于水隧道检查的机器人,包括(a)壳体,包括上壳体和下壳体;其中,上壳体和下壳体的尺寸和形状设置为彼此匹配,从而在其内共同限定封闭空腔;(b)相机系统,被配置为捕获周围环境的视场的图像或视频;(c)照明系统,被配置为至少部分地为视场提供照明;(d)推进系统,被配置为向水中的机器人提供推进力;以及(e)控制系统,被配置为提供机器人的动力和控制操作,其中,机器人被配置为漂浮在水面上并且重心的位置低于几何中心。本文描述了其他示例实施例。在某些实施例中,机器人在无需人工操作的情况下提供安全且高效的隧道检查。技术研发人员:周建树,黄骏达,刘云辉受保护的技术使用者:香港物流机械人研究中心有限公司技术研发日:20231017技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/225955.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
船舶海生物清理机器人
下一篇
返回列表