一种无人测量船的制作方法
- 国知局
- 2024-08-01 07:07:23
本技术涉及无人测量船,尤其涉及一种无人测量船。
背景技术:
1、在对水下地形等数据进行采集测量时,需要工作人员带设备乘船划行到指定区域进行作业,但是在一些流速较大,而又不适合大型船只通过的水域时,人员的安全风险较大。为了减少人员的风险,无人测量船是最佳选择。专利公告号为:“cn210478972u”,专利名称为:“一种无人测量船耐碰撞船体结构”的一件实用新型专利,包括船体和推进器,所述船体为三体船结构,包括主船体和两个辅助船体,所述主船体的前端设置有导向轮组件,所述辅助船体的前端和后端分别设置有导向轮组件,通过上述设置,无人测量船在前进的过程中,在碰触到异物时,避免无人测量船船体的损坏。
2、但是,上述无人测量船在针对某些使用情况中仍存在一定的使用弊端:上述无人测量船在遇到突发情况时,依靠导向轮组件并不能有效缓冲碰撞,反而会使船体局部受损,而且导向轮组件不能全方位防止船体被撞,不能有效缓冲与其他物体的碰撞,防护效果较差,而且船体在停靠时,与河岸接触时会有刚性相互作用力,如果依靠导向架转动将船体航行方向进行调节,反而使船体停靠不稳定。因此,提出针对性解决上述缺陷的无人测量船。
技术实现思路
1、本实用新型克服了现有技术的不足,提供一种无人测量船。
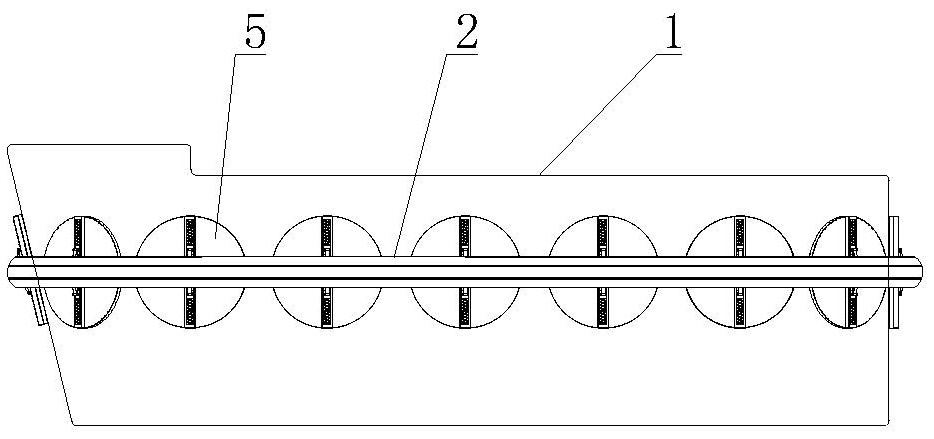
2、为达到上述目的,本实用新型采用的技术方案为:一种无人测量船,包括:船体以及设置在所述船体外周侧面的防撞组件,所述防撞组件包括:围绕船体一周设置的缓冲条组,所述缓冲条组内侧设置若干缓冲结构,所述缓冲结构固定设置在船体上;所述缓冲结构包括:螺栓连接在缓冲条组一侧的若干固定块,若干所述固定块等距设置,且所述固定块铰接连接若干支撑杆,若干所述支撑杆均滑动连接装配板,所述装配板固定连接在船体外侧。
3、本实用新型一个较佳实施例中,所述缓冲条组包括:第一防撞条和第二防撞条,所述第一防撞条横截面为半圆状,且所述第一防撞条和第二防撞条卡接连接。
4、本实用新型一个较佳实施例中,所述第一防撞条内部设置形变腔体,且形变腔体为全封闭状态。
5、本实用新型一个较佳实施例中,所述第一防撞条和所述第二防撞条均采用橡胶材质制成。
6、本实用新型一个较佳实施例中,所述装配板外侧以圆周阵列方式设置若干导向轨道,若干所述导向轨道内均设置限位滑块,所述限位滑块铰接连接所述支撑杆。
7、本实用新型一个较佳实施例中,所述限位滑块通过液压伸缩杆连接所述导向轨道一端,所述液压伸缩杆周向外侧设置伸缩弹簧,所述液压伸缩杆和所述伸缩弹簧组成减震结构。
8、本实用新型解决了背景技术中存在的缺陷,本实用新型具备以下有益效果:
9、(1)本实用新型通过缓冲条组及时拦截障碍物,避免障碍物接触船体,有效防止船体被撞受损,而且通过在缓冲条组内侧设置的缓冲结构,在缓冲条组接触障碍物时,对应的固定块会挤压支撑杆,支撑杆另一端会逐渐推动滑块,滑块克服伸缩弹簧和液压伸缩杆的阻力靠近导向轨道一端运动,而且缓冲条组被撞击之后会带动多个固定块运动,从而将撞击力分散到多个装配板上,即将撞击力分散到船体的多个位置,有效缓冲撞击力。
10、(2)本实用新型通过在第一防撞条内部设置形的变腔体,相比实心状态,能够增强第一防撞条形变能力,进一步辅助增强缓冲效果,而且第一防撞条和第二防撞条卡接设置,由于第二防撞条与障碍物接触较多,在第二防撞条长时间使用磨损的情况下,能够及时更换第二防撞条,使用成本较低。
技术特征:1.一种无人测量船,包括:船体(1)以及设置在所述船体(1)外周侧面的防撞组件,其特征在于,所述防撞组件包括:围绕船体(1)一周设置的缓冲条组(2),所述缓冲条组(2)内侧设置若干缓冲结构,所述缓冲结构固定设置在船体(1)上;所述缓冲结构包括:螺栓连接在缓冲条组(2)一侧的若干固定块(3),若干所述固定块(3)等距设置,且所述固定块(3)铰接连接若干支撑杆(4),若干所述支撑杆(4)均滑动连接装配板(5),所述装配板(5)固定连接在船体(1)外侧。
2.根据权利要求1所述的一种无人测量船,其特征在于:所述缓冲条组(2)包括:第一防撞条(201)和第二防撞条(202),所述第一防撞条(201)横截面为半圆状,且所述第一防撞条(201)和第二防撞条(202)卡接连接。
3.根据权利要求2所述的一种无人测量船,其特征在于:所述第一防撞条(201)内部设置形变腔体(203),且形变腔体(203)为全封闭状态。
4.根据权利要求2所述的一种无人测量船,其特征在于:所述第一防撞条(201)和所述第二防撞条(202)均采用橡胶材质制成。
5.根据权利要求1所述的一种无人测量船,其特征在于:所述装配板(5)外侧以圆周阵列方式设置若干导向轨道(6),若干所述导向轨道(6)内均设置限位滑块(7),所述限位滑块(7)铰接连接所述支撑杆(4)。
6.根据权利要求5所述的一种无人测量船,其特征在于:所述限位滑块(7)通过液压伸缩杆(801)连接所述导向轨道(6)一端,所述液压伸缩杆(801)周向外侧设置伸缩弹簧(802),所述液压伸缩杆(801)和所述伸缩弹簧(802)组成减震结构(8)。
技术总结本技术公开了一种无人测量船,包括:船体以及设置在船体外周侧面的防撞组件,防撞组件包括:围绕船体一周设置的缓冲条组,缓冲条组内侧设置若干缓冲结构,缓冲结构固定设置在船体上;缓冲结构包括:螺栓连接在缓冲条组一侧的若干固定块,若干固定块等距设置,且固定块铰接连接若干支撑杆,若干支撑杆均滑动连接装配板,装配板固定连接在船体外侧。通过在缓冲条组内侧设置的缓冲结构,在缓冲条组接触障碍物时,对应的固定块会挤压支撑杆,支撑杆另一端会逐渐推动滑块,滑块克服伸缩弹簧和液压伸缩杆的阻力靠近导向轨道一端运动,而且缓冲条组被撞击之后会带动多个固定块运动,从而将撞击力分散到船体的多个位置,有效缓冲撞击力。技术研发人员:赵元春,赵果夫受保护的技术使用者:宜宾神川电子科技有限责任公司技术研发日:20231027技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/226246.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。