一种水下清洗机器人集成系统的制作方法
- 国知局
- 2024-08-01 07:11:37
本申请属于船舶清洗,具体而言涉及一种水下清洗机器人集成系统。
背景技术:
1、近年来,随着我国航运业的发展,我国水路货运量不断上升。由于船舶长期在水中航行,水中的藻类、藤壶等大面积附着在船体上,对船舶运输造成严重不良影响。附着的海生物不仅会对船体造成伤害,而且会增加船舶航行的阻力,导致航运成本的增加,因此有必要对船舶表面进行定期清洗。
2、近期多种水下清洗机器人出现在市面上,但在机器人及辅助集成系统方面没有集成化设计,导致现场需重新布置电路、管路,延长了清洗作业时间,清洗效率低下,而且所需作业区域大,现场空间利用率底、整洁度低。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种水下清洗机器人集成系统,用以解决现有技术中存在的上述问题中的一者或多者。
2、本发明的目的是这样实现的:
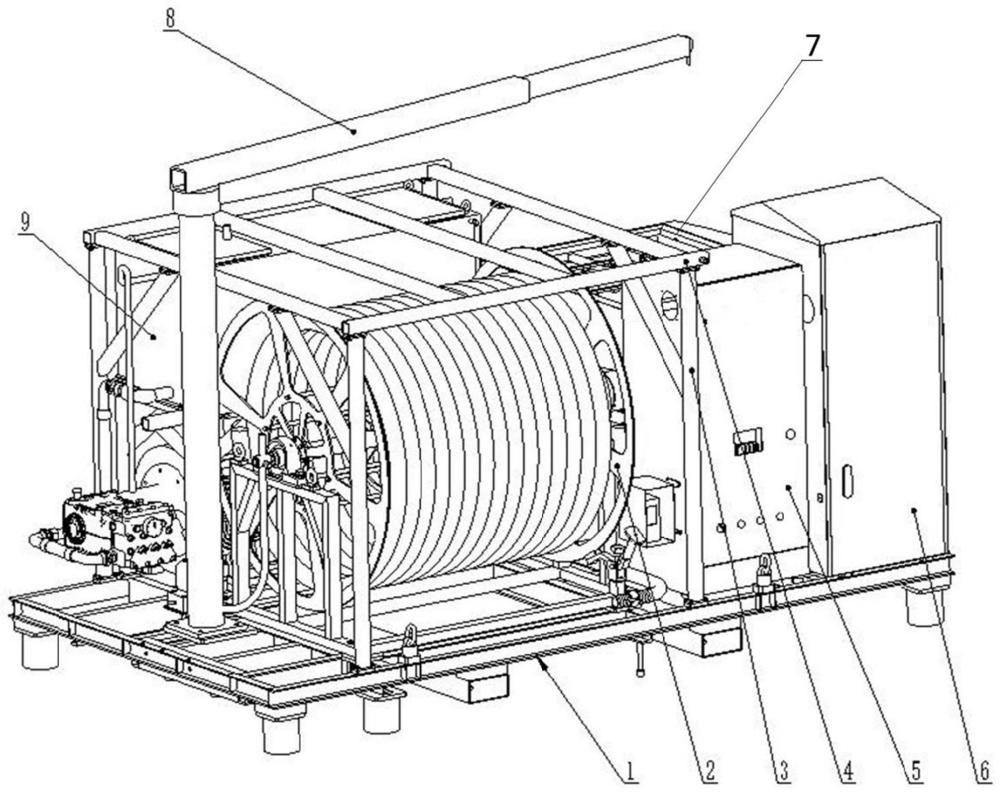
3、一种水下清洗机器人集成系统,包括集成底座以及设于集成底座上的线缆盘、支撑梁、上焊架、高压泵控制柜、配电柜、水下清洗机器人、悬臂吊、储水机构、检修平台、潜水泵、水箱焊架和高压泵组;集成底座在平面上具有第一安装区域、第二安装区域和第三安装区域,其中,第二安装区域和第三安装区域并列设置在第一安装区域的同一侧;第一安装区域安装有承载线缆盘、支撑梁、上焊架、悬臂吊、储水机构、水箱焊架和高压泵组;第二安装区域安装有高压泵控制柜和配电柜;第三安装区域安装有水下清洗机器人、检修平台和潜水泵。
4、进一步地,集成底座采用槽钢及钢管焊接而成;集成底座设有吊装接口、叉装接口、转运轮安装接口中的至少一者。
5、进一步地,集成底座的底部还设有多个减震垫安装接口,每个减震垫安装接口上安装一个减震垫。
6、进一步地,线缆盘包括底座以及设于底座上的水管盘、电机组件、链条驱动组和刹车组件;链条驱动组通过链条与电机组件的输出轴端连接,刹车组件用于水管盘的刹车;与水下清洗机器人连接的电缆、水管、通信缆设置在保护管内,形成集成管线;集成管线缠绕在水管盘上,电机组件通过链条驱动组和链条驱动水管盘转动,以实现集成管线的收回和释放。
7、进一步地,线缆盘还包括链条防护罩和导向滑轮,链条防护罩罩设在链条的外部,导向滑轮用于集成管线释放时的导向。
8、进一步地,水管盘包括主轴、大圆盘、带座轴承、链轮、连接杆、旋转接头;底座上设有机架,主轴通过带座轴承转动设于机架上,主轴的端部设置链轮,链轮通过链条连接链条驱动组;主轴的一端同轴设有过水通道,主轴的侧壁上设有与过水通道连通的出水连接头,出水连接头用于连接待收放的水管;旋转接头的进水端连接水管,旋转接头的出水端与过水通道连通;主轴的两端分别设有一个大圆盘,两个大圆盘之间的空间形成集成管线的缠绕空间,出水连接头位于缠绕空间内;缠绕空间内还设有多根连接杆,连接杆平行于主轴设置,集成管线缠绕在处于同一圆周面上的连接杆上。
9、进一步地,主轴上还设有至少一个小圆盘,小圆盘的直径小于大圆盘的直径,多根连接杆均匀固定在小圆盘的外圆周上。
10、进一步地,电机组件的电机具备变频功能,被配置为根据作业需求,通过变频器控制电机转速实现控制收放缆速度。
11、进一步地,保护管上设置浮材。
12、进一步地,上焊架为矩形框架结构,固定设置在支撑梁的顶端,四根支撑梁和上焊架搭建构成侧向应力抵抗机构,侧向应力抵抗机构整体为长方体框架结构。
13、进一步地,支撑梁上设置有斜撑,斜撑的一端固定于支撑梁上,另一端固定于上焊架。
14、进一步地,悬臂吊具有升降杆和水平伸缩杆,升降杆与水平伸缩杆的顶端转动连接,升降杆能够绕伸缩杆的轴线360°旋转,升降杆和水平伸缩杆的长度均可调节;水平伸缩杆的端部通过吊带连接水下清洗机器人。
15、进一步地,储水机构被配置为存放海水,储水机构具有水箱、进水管和出水管,水箱的进水口通过进水管连接潜水泵,潜水泵能够将海水泵入水箱内;水箱的出水口通过出水管连接高压泵组,利用高压泵组将水箱内的水高压泵出,供水下清洗机器人对船舶的船身及船底进行清洗。
16、进一步地,水箱的出水口和进水口分别设置第一过滤件及第二过滤件,第一过滤件采用50目滤芯,第二过滤件采用30目滤芯。
17、进一步地,水箱的顶部设有两个可打开和闭合的检修盖,其中一个检修盖位于第一过滤件上方,另一个检修盖位于第二过滤件上方。
18、进一步地,水下清洗机器人放置于检修平台的上方,检修平台的底部具有检修空间,运输时底部检修空间用于存放电缆及潜水泵。
19、进一步地,潜水泵的外部设有防护笼。
20、进一步地,水箱设于水箱焊架的顶面,水箱焊架的下部空间用于安装高压泵组。
21、进一步地,高压泵组被配置为向水下清洗机器人提供清洗用的高压水。
22、进一步地,高压泵组单独设有存放变频器的控制柜,能够根据需求调节高压泵组的压力。
23、与现有技术相比,本发明至少可实现如下有益效果之一:
24、a)本发明提供的水下清洗机器人集成系统,采用集成化式设计,优化管路、线路,将原本零散的部件集成到集成底座上,免去了多次装卸运输、各部件需要摆放及走线、走管路的麻烦,减少清洗作业时间,实现了高效作业,作业区域更小,提高现场空间利用率、整洁度,现场整洁规范性更好。
25、b)本发明提供的水下清洗机器人集成系统,线缆盘可拖动200米水管、线缆,可方便快捷地收放缆,防止卡住水管、线缆,通过浮材、保护管包裹水管、线缆,能够实现零浮力,方便机器人行进作业。
技术特征:1.一种水下清洗机器人集成系统,其特征在于,包括集成底座以及设于集成底座上的线缆盘、支撑梁、上焊架、高压泵控制柜、配电柜、水下清洗机器人、悬臂吊、储水机构、检修平台、潜水泵、水箱焊架和高压泵组;
2.根据权利要求1所述的水下清洗机器人集成系统,其特征在于,集成底座采用槽钢及钢管焊接而成;集成底座设有吊装接口、叉装接口、转运轮安装接口中的至少一者。
3.根据权利要求2所述的水下清洗机器人集成系统,其特征在于,集成底座的底部还设有多个减震垫安装接口,每个减震垫安装接口上安装一个减震垫。
4.根据权利要求1所述的水下清洗机器人集成系统,其特征在于,线缆盘包括底座以及设于底座上的水管盘、电机组件、链条驱动组和刹车组件;链条驱动组通过链条与电机组件的输出轴端连接,刹车组件用于水管盘的刹车;与水下清洗机器人连接的电缆、水管、通信缆设置在保护管内,形成集成管线;集成管线缠绕在水管盘上,电机组件通过链条驱动组和链条驱动水管盘转动,以实现集成管线的收回和释放。
5.根据权利要求1所述的水下清洗机器人集成系统,其特征在于,线缆盘还包括链条防护罩和导向滑轮,链条防护罩罩设在链条的外部,导向滑轮用于集成管线释放时的导向。
6.根据权利要求1所述的水下清洗机器人集成系统,其特征在于,水管盘包括主轴、大圆盘、带座轴承、链轮、连接杆、旋转接头;
7.根据权利要求6所述的水下清洗机器人集成系统,其特征在于,主轴上还设有至少一个小圆盘,小圆盘的直径小于大圆盘的直径,多根连接杆均匀固定在小圆盘的外圆周上。
8.根据权利要求1所述的水下清洗机器人集成系统,其特征在于,电机组件的电机具备变频功能,被配置为根据作业需求,通过变频器控制电机转速实现控制收放缆速度。
9.根据权利要求1所述的水下清洗机器人集成系统,其特征在于,保护管上设置浮材。
10.根据权利要求1所述的水下清洗机器人集成系统,其特征在于,水箱设于水箱焊架的顶面,水箱焊架的下部空间用于安装高压泵组。
技术总结本申请涉及一种水下清洗机器人集成系统,包括集成底座以及设于集成底座上的线缆盘、支撑梁、上焊架、高压泵控制柜、配电柜、水下清洗机器人、悬臂吊、储水机构、检修平台、潜水泵、水箱焊架和高压泵组;集成底座上具有第一安装区域、第二安装区域和第三安装区域,其中,第二安装区域和第三安装区域并列设置在第一安装区域的同侧;第一安装区域安装有承载线缆盘、支撑梁、上焊架、悬臂吊、储水机构、水箱焊架和高压泵组;第二安装区域安装有高压泵控制柜和配电柜;第三安装区域安装有水下清洗机器人、检修平台和潜水泵。本申请通过将原本零散部件集成到集成底座上,免去多次装卸运输、各部件需要摆放及走线、走管路的麻烦,提高了清洗工作效率。技术研发人员:雷良兵,徐富正,裴新平,许朋朋,臧帅,王旭东,宋金鹏受保护的技术使用者:北京海科智机器人科技有限公司技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/226496.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表