一种仿哥布林鲨的海参捕捞机器人及其位姿控制方法
- 国知局
- 2024-08-01 07:16:49
本发明涉及水下捕捞装备,具体涉及一种仿哥布林鲨的海参捕捞机器人及其位姿控制方法。
背景技术:
1、海参是一种营养和食疗价值较高的水产品,近年来,随着生活水平的提高,人们对海参的需求也日渐增加。因此,如何快速高效的抓取海参成为了水产养殖业关注的重点问题。
2、目前海参捕捞工作分为人工捕捞和机器人捕捞两种方式。人工捕捞是目前海参捕捞的主要方式,但该方式存在工人下水时间有限、危险性高、易引发疾病、从业人员越来越少等缺点。机器人捕捞是一种新兴的海参捕捞方式,按照捕捞方式可将其分为夹取式和泵吸式。夹取式水下捕捞机器人指的是采用机械臂对海参进行抓取,该方式存在夹取力度不易调节、捕捞效率低、夹取后存放不方便等问题;泵吸式主要依靠泵的不间断吸附力“抽取”海参,极易抽取到杂质且易误捕捉不符合既定尺寸的海参。
3、现有的泵吸式海参捕捞装置在捕捉海参过程中,为了快速有效的吸取海参,伸缩嘴向前快速前伸进行吸取海参后并缩回箱体。在其“前伸”与“缩回”过程中由于其重心发生了偏移,则整个装置不可避免的出现姿态偏移,如果不能有效保持其期望捕捉姿态,则难以实现海参的精确捕捞,不可避免会出现误抓、漏抓海参情况。因此,亟需一种高效率、高精准捕捞的海参捕捞装置,以促进水下机器人海参捕捞业的发展。
技术实现思路
1、针对上述现有技术的不足,本发明的一个目的在于提出一种仿哥布林鲨的海参捕捞机器人,解决现有泵吸式海参捕捞装置的伸缩嘴移动过程中,重心发生了偏移使整体出现姿态偏移,出现误捕、漏捕海参的问题,难以实现海参的精确捕捞,捕捞效率较低。
2、为了解决上述技术问题,本发明所采用的技术方案是:
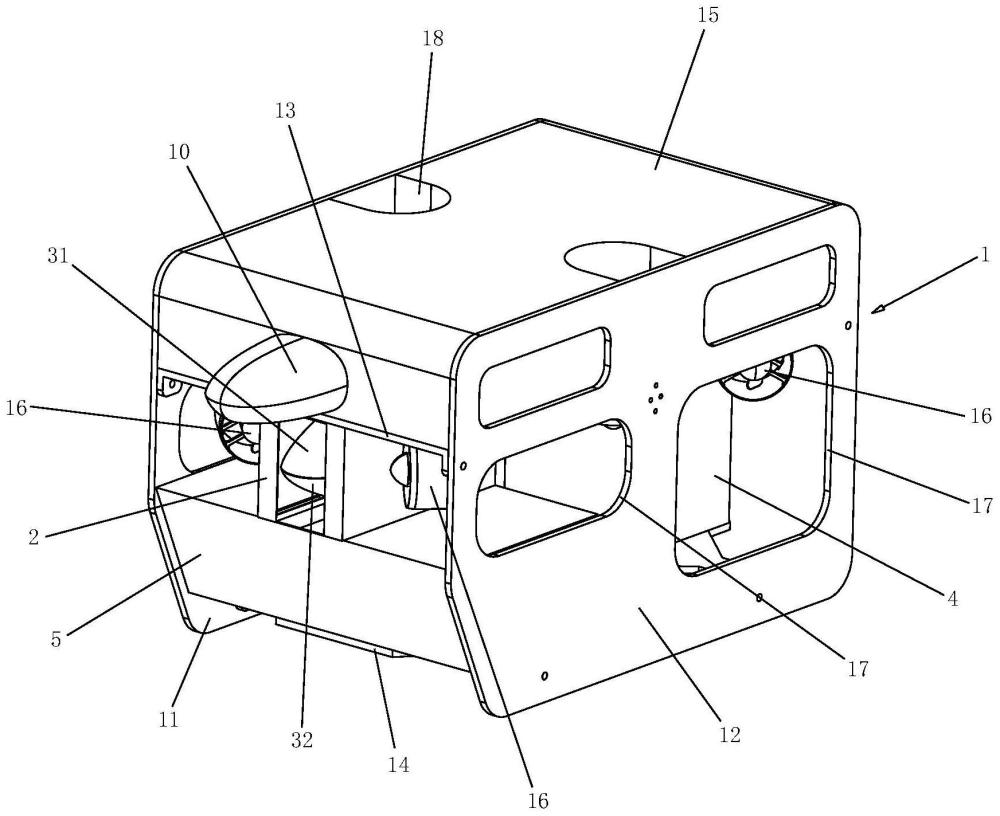
3、一种仿哥布林鲨的海参捕捞机器人,包括机架、浮体、推进器、运动仓、仿生鱼嘴、控制仓、收集箱、抽吸装置及探测控制单元,所述机架为具有开放内腔的钢架结构,浮体设置在机架的顶部,推进器有两组,对称设置在机架的左右两侧。
4、收集箱设于机架的前部下侧,运动仓为前侧开口的方形箱体,设于收集箱和浮体之间,控制仓相邻布置在收集箱后侧。
5、仿生鱼嘴位于运动仓的内部前侧且与运动仓的开口正对,通过导向支架与运动仓纵向滑动配合,运动仓的后部设有伸缩驱动装置,伸缩驱动装置带动导向支架和仿生鱼嘴前后移动。
6、仿生鱼嘴包括上颚壳体、下颚壳体及弹性内衬体,上、下颚壳体一上一下相对布置,弹性内衬体设在上、下颚壳体的内侧,为前端带有条形口的楔形囊状结构。
7、上颚壳体和下颚壳体分别与导向支架转动相连,导向支架上设有鱼嘴开合装置,鱼嘴开合装置的执行端与上、下颚壳体的后端相连,驱动上颚壳体和下颚壳体同步相对运动,使仿生鱼嘴开启和闭合。
8、抽吸装置设在控制仓前部,通过位于收集箱内的三通管与弹性内衬体的后端相连相通,收集箱通过排水机构与外部相通,控制仓的后部设有横向调平装置和纵向调平装置,纵向和横向调平装置一高一低布置。
9、探测控制单元包括透明罩壳、深度相机、图像识别模块、九轴姿态传感器及控制器,透明罩壳设在浮体前侧,深度相机及图像识别模块封装在透明罩壳内,九轴姿态传感器和图像识别模块分别与控制器通讯相连。
10、进一步地,机架包括左侧板、右侧板、顶板及底板,左侧板和右侧板结构相同且左右相对布置,底板和顶板均位于左、右侧板之间,底板两侧分别与左、右侧板的下部固定相连,顶板两侧分别与左、右侧板的上部固定相连。
11、浮体是方形的泡沫板,固定安装在顶板的上表面,其两侧与左、右侧板固定相连。
12、进一步地,每组推进器均包括由前往后依次间隔布置的三个推进器,位于前端和后端的推进器相对于机架的中轴线倾斜布置,位于中间的推进器竖向布置且以内嵌的方式固定于同侧的侧板上。
13、左侧板和右侧板上均开设有与同侧前后两端的推进器的轴向位置分别对应的窗口,浮体的两侧对称开设有竖向的两个通槽,每个通槽均与同侧中间的推进器正对。
14、进一步地,收集箱为顶部后侧具有方形凸起部的密闭箱体,其内侧后部具有竖向布置的过滤板,过滤板将收集箱分成前腔室和后腔室。
15、所述三通管设在前腔室的顶部,其前端口穿出收集箱,通过波纹管与弹性内衬体的后端相连,三通管的下端口与第一管体的一端相连,第一管体的另一端穿出收集箱的后侧壁与抽吸装置相连,三通管的内部设有过滤网。
16、所述排水机构包括第二管体、第三管体和涡轮泵,涡轮泵设置控制仓上部,其进口端通过第二管体与收集箱的后侧上部相连,第三管体一端与涡轮泵的出口端相连,另一端伸至控制仓的外部。
17、进一步地,导向支架包括左右相对布置的两个t形杆,两个t形杆通过一上一下平行布置的两个固定轴相连成一体,t形杆的后端及其上下两端分别与运动仓的内壁前后滑动配合。
18、上颚壳体的后侧顶部与上方的固定轴转动配合,下颚壳体的后侧底部与下方的固定轴转动配合,上颚壳体后端的左右两侧对称设有两个第一支撑臂,下颚壳体后端的左右两侧对称设有两个第二支撑臂,每个支撑臂上均开设有长条孔。
19、弹性内衬体是由位于前侧的三角形外壳和位于后侧的漏斗形外壳相连构成的一体结构,条形口位于三角形外壳的前端,弹性内衬体的前端上侧与上颚壳体固定相连,其前端下侧与下颚壳体固定相连。
20、进一步地,伸缩驱动装置包括第一双轴电机、第一摇臂和第一连杆,第一双轴电机安装在收集箱的顶部,第一摇臂有两个且平行布置在第一双轴电机两侧,第一双轴电机的信号端与控制器通讯相连。
21、第一摇臂一端与第一双轴电机的同侧转轴固定相连,另一端通过所述第一连杆与同侧t形杆后端活动相连,工作状态下,第一双轴电机驱动两个第一摇臂同步摆动,并通过第一连杆驱动导向支架前后移动,使仿生鱼嘴伸至运动仓的外部。
22、进一步地,鱼嘴开合装置包括第一伺服电机、第二摇臂、第一连接轴、导向块和第一驱动轴,所述第一伺服电机安装在导向支架上,其输出轴与第二摇臂的一端固定相连,第一伺服电机的信号端与控制器通讯相连;
23、导向块有两个,分别设置在两个t形杆后端相互靠近的一侧,两个导向块正向对应,且相对的一侧均开设有同样的环形槽,第一连接轴横向水平布置,其两端分别位于两个环形槽内与导向块滑动配合,第二摇臂的另一端与第一连接轴转动相连。
24、第一驱动轴位于第一连接轴前侧且与其平行布置,两个t形杆前部相互靠近的一侧均设置有条形滑槽,第一驱动轴穿过各支撑臂的长条孔,其两端伸至条形滑槽内与两个t形杆前后滑动配合,第一连接轴通过左右布置的两个第二连杆与第一驱动轴活动相连。
25、工作状态下,第一伺服电机通过第二摇臂驱动第一连接轴沿环形槽运动,通过第二连杆带动第一驱动轴相对于导向支架前后移动,使上颚壳体和下颚壳体同步转动。
26、进一步地,抽吸装置包括缸筒、活塞组件、单向阀组和驱动机构,缸筒纵向水平布置,其前端与第一管体的另一端相连相通,后端封闭,缸筒的后部通过连通管与控制仓的外部相通。
27、活塞组件设置在缸筒内部,其后侧设有活塞杆,活塞杆的后端伸至缸筒的外部,活塞杆与缸筒滑动密封配合,单向阀组设在缸筒内部且位于活塞组件的前侧。
28、缸筒的顶部设有支撑架,所述驱动机构包括第二双轴电机、第三摇臂和叉形驱动杆,叉形驱动杆的中部与支撑架上端铰接,第二双轴电机固定于控制仓前侧壁上,第三摇臂有两个,相对平行设置在第一双轴电机的两个转轴上,第三摇臂通过第三连杆与叉形驱动杆的后端转动相连,叉形驱动杆的前端通过第四连杆与活塞杆的后端转动相连。
29、进一步地,纵向调平装置和横向调平装置均包括配重块和平行布置的两个导轨,配重块滑动设置在两个导轨顶部,配重块与设在两个第一导轨之间的带传动机构相连,带传动机构驱动配重块沿导轨移动。
30、横向调平装置的两个导轨一前一后横向布置,纵向调平装置的两个导轨一左一右纵向布置,带传动机构包括同步带和两个同步带轮,两个同步带轮通过同步带相连,同步带与配重块底部固定相连,其中一个同步带轮配置有第二伺服电机,第二伺服电机的信号端与控制器通讯相连。
31、本发明的另一个目的在于提出上述一种仿哥布林鲨的海参捕捞机器人的位姿控制方法。
32、一种仿哥布林鲨的海参捕捞机器人的位姿控制方法,应用上述一种仿哥布林鲨的海参捕捞机器人,该海参捕捞机器人利用深度确定性策略梯度算法进行姿态控制训练。
33、位姿控制方法包括如下步骤:
34、步骤一、构造神经网络:初始化当前actor神经网络和当前critic神经网络,把当前actor神经网络和当前critic神经网络复制到目标actor神经网络和目标critic神经网络中。初始化当前critic神经网络与目标critic神经网络的参数ω与初始化当前actor神经网络与目标actor神经网络的参数θ与
35、步骤二、生成样本:当前actor神经网络与海参捕捞机器人的位置坐标和姿态进行交互,将当前环境状态st信息输入到当前actor网络,当前环境状态st包括俯仰角、横滚角和偏航角,并根据行为策略选择一个策略at,策略at包括横向调平装置配重块的位移g1和纵向调平装置配重块的位移g2;海参捕捞机器人执行策略at,获得奖励rt和下一时刻的环境状态st+1。
36、用四元组(st,at,rt,st+1)表示在当前环境状态st时,采取策略at,得到的奖励rt和下一时刻的环境状态st+1;将经验数据(st,at,rt,st+1)存入经验缓冲池。
37、步骤三、更新当前critic神经网络:随机选取经验缓冲池中数据(st,at,rt,st+1)进行训练,把st和at输入到当前critic神经网络中,得到当前的估计状态值函数qt(st,at);把st+1输入到目标actor神经网络中,得到策略at’。
38、把st+1和at’输入到目标critic神经网络中,得到状态值函数qt(st+1,at’),则目标状态值函数qt’(st+1,at’)=rt+γqt(st+1,at’),其中,γ为加权系数;建立损失函数l=(qt(st,at)-qt’(st+1,at’))2模型,以最小化函数l为基准,更新当前critic神经网络的网络参数ω。
39、步骤四、更新当前actor神经网络:利用梯度策略函数基于准则θ←θ+α▽θqt(st,at)更新当前actor神经网络的网络参数θ,其中,θ←θ+α▽θqt(st,at)表示利用θ+α▽θqt(st,at)替换θ的值,实现对θ的更新。
40、其中,▽θqt(st,at)为关于qt(st,at)梯度策略函数;anew为利用当前actor神经网络计算出在环境状态st作用下的策略值;▽θanew为策略值anew对网络参数θ的梯度,▽aqt(st,at)为qt(st,at)对策略值anew的梯度;0≤α≤1。
41、步骤五、更新目标神经网络:根据分别对目标critic神经网络的网络参数为和目标actor神经网络的网络参数进行更新,0≤τ≤1;其中,表示利用替换的值,实现对的更新;表示利用替换的值,实现对的更新。
42、判断是否达到最大训练次数n,若达到最大训练次数,则训练完成,获得水下机器人姿态控制策略;否则,执行步骤二。
43、通过采用上述技术方案,本发明的有益技术效果是:本发明的一种仿哥布林鲨的海参捕捞机器人通过深度确定性策略梯度算法完成水下位姿控制的训练,通过探测控制单元探测和识别满足尺寸要求的海参,调节重心位置准确吸入海参,自动化、智能化程度高,实现精准捕捞,提高海参捕捞的精准度和捕捞效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226862.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表