一种轻量化水下机器人的制作方法
- 国知局
- 2024-08-01 07:17:45
本申请涉及水下机器人的领域,尤其是涉及一种轻量化水下机器人。
背景技术:
1、水下机器人是一种能够在水下环境中执行任务的机器人。它们被设计用于海洋科学研究、海洋资源开发、海底油气勘探、水下考古、海洋生物学研究等领域。随着技术的不断发展,水下机器人在海洋领域的应用前景非常广阔,在海洋领域发挥着重要作用,同时很多高校举行水下机器人大赛,以用于验证和提升水下机器人的性能。
2、水下机器人通常具备外框、推进器和电源舱,电源舱内安装有电源模块,电源模块为水下机器人提供电力来源,推进组件推动水下机器人在水下移动和偏航。一些具有特殊功能的水下机器人还配备了抓取器、摄像头和其他模块,用于探测周围环境、拍摄图像、抓取特定物品等,操作员可以远程操控水下机器人执行特定任务。
3、针对上述中的相关技术,传统的水下机器人结构复杂,导致机器人重量过大,不利于水下机器人在水下的自由运动。
技术实现思路
1、为了在保证机器人功能正常的前提下,简化机器人结构,从而减轻机器人的重量,保证机器人在水下的敏捷和灵活,本申请提供一种轻量化水下机器人。
2、本申请提供的一种轻量化水下机器人采用如下的技术方案:
3、一种轻量化水下机器人,包括外框,所述外框包括底板和两个侧板,两个侧板于底板相对的两侧与底板相连,两个侧板之间设置有两个连接板,连接板两端分别与两个侧板固定连接;所述底板与所述侧板均开设有若干减重槽;
4、固定板,固定板连接于连接板的外侧与底板相连,固定板远离连接板的一侧安装有密封罩,所述密封罩与所述固定板相连形成镜头舱;
5、电源舱,所述电源舱与所述固定板远离所述镜头舱一侧连接,同时所述电源舱与所述底板连接;
6、多组推进器,多组所述推进器分为若干水平进退推进器、若干水平横移推进器和若干竖直升降推进器,所述水平进退推进器能够实现水下机器人的水平进退运动;所述水平横移推进器能够实现水下机器人的水平横移运动;所述竖直升降推进器能够实现水下机器人的竖直运动;多组所述推进器配合能够实现水下机器人的俯仰、偏航和横滚。
7、通过采用上述技术方案,该机器人的结构与传统机器人结构相比结构更加简单,减重槽的开设不仅减轻了外框的重量,框式的壳体设计又能降低壳体的挡水面积,提高机器人的灵活性和轻盈性,在保证机器人功能正常的前提下,简化了机器人结构,从而减轻了机器人的重量,保证机器人在水下的敏捷和灵活。
8、可选的,所述水平进退推进器与所述底板相连,分别位于靠近两个所述侧板位置处,所述水平进退推进器的推进方向为第一方向;所述水平横移推进器与所述电源舱的顶部相连,所述水平横移推进器的推进方向为第二方向;所述竖直升降推进器与所述侧板或所述连接板相连,所述竖直升降推进器的推进方向为第三方向;所述第一方向、第二方向与所述第三方向均互相垂直。
9、通过采用上述技术方案,推进器的三个推进方向能够满足机器人向不同方位运动的需求,同时通过调整其中某个推进器的推进方向,能够实现机器人的俯仰、偏航和横滚等复杂动作,提高了机器人的灵活性和敏捷度。
10、可选的,所述电源舱包括舱体和舱盖,所述舱体与所述舱盖通过螺栓连接,所述舱体与所述底板连接,所述舱盖位于所述舱体的顶部。
11、通过采用上述技术方案,舱体和舱盖的可拆卸连接使得电源舱内的检修与维护更加方便,操作者只需将舱盖与舱体分离,即能对电源舱的内部进行相应的操作。
12、可选的,所述固定板开设有第一安装孔和多个穿线孔,多个穿线孔与若干竖直升降推进器和若干水平横移推进器一一对应,所述第一安装孔于电源舱端部位置处延伸至所述电源舱内部,连通所述镜头舱与所述电源舱。
13、通过采用上述技术方案,若干竖直升降推进器和若干水平横移推进器的电源线能够从固定板的穿线孔穿入镜头舱,通过镜头舱开设的第一安装孔与电源舱的端部相连,即方便了电源舱的舱盖的拆离,同时利用了固定板的挡水面积,降低了电源线对推进器在推进时的水流的阻挡率,进一步降低了机器人的整体阻力。
14、可选的,所述舱盖顶部开设有用于安装插座的第二安装孔,所述第二安装孔位于远离所述第一安装孔位置处。
15、通过采用上述技术方案,第二安装孔能够安装插座,实现电源舱与外界的信号或电源的传递,当机器人电源内置时,插座能够实现电源舱与外界的信号传递,当电源外置时,插座能够实现电源舱与外界的信号和电源的传递,第二安装孔位于远离所述第一安装孔位置处,保证在安装和拆卸舱盖顶部的插座时不会和与穿线孔相连的格兰头发生干涉,同时增大操作空间,使得插座的安装更加方便。
16、可选的,所述侧板与所述底板和所述连接板的连接位置处均螺栓连接有角铁。
17、通过采用上述技术方案,角铁连接可以提供更加稳定和牢固的连接,相对于其他连接方式来说,角铁成本较低,安装比较简单,维护成本比较低,同时角铁连接可以进行多次拆卸和重复使用,进一步节约了材料和人力成本。
18、可选的,所述密封罩靠近所述固定板一侧安装有密封圈,密封罩与固定板夹紧密封圈实现镜头舱的密封。
19、通过采用上述技术方案,夹紧密封圈可以使密封罩与固定板之间形成紧密的密封,防止水从密封罩和固定板之间进入镜头舱内,从而保护镜头舱内的设备正常的运行,提高机器人的可靠性和安全性。
20、可选的,所述底板对应密封罩正下方位置处向外延伸形成安装平台,所述安装平台开设有装配孔。
21、通过采用上述技术方案,通过安装孔和安装平台,可以轻松地将其他功能设备安装到机器人上。用户可以根据自己的需求选择和安装不同的设备。这样,机器人可以根据具体任务的要求进行定制和配置,提高了机器人的适应性和多功能性。
22、可选的,还包括多个浮力舱,所述浮力舱于所述外框内与所述外框相连。
23、通过采用上述技术方案,通过改变浮力舱的重量,可以轻松地调整机器人的浮力,通过精确控制浮力舱的重量,可以使机器人保持平衡和稳定的姿态,增加了机器人的灵活性、适应性和操作稳定性。有助于机器人在不同水域环境中执行任务,并满足不同负载情况下的需求。
24、综上所述,本申请包括以下至少一种有益技术效果:
25、1.通过采用框式设计和减重槽的开设,使得水下机器人整体更加轻盈,降低了机器人的重量,提高了机器人的灵活性;
26、2.采用角铁连接固定板与侧板、底板和连接板,提供了更加稳定和牢固的连接,同时连接成本较低,安装比较简单;
27、3.推进器的电源线从固定板的穿线孔穿入镜头舱,通过镜头舱开设的第一安装孔与电源舱的端部相连,即方便了电源舱的舱盖的拆离,同时利用了固定板的挡水面积,降低了电源线对推进器在推进时的水流的阻挡率,进一步降低了机器人的整体阻力。
技术特征:1.一种轻量化水下机器人,其特征在于,包括:
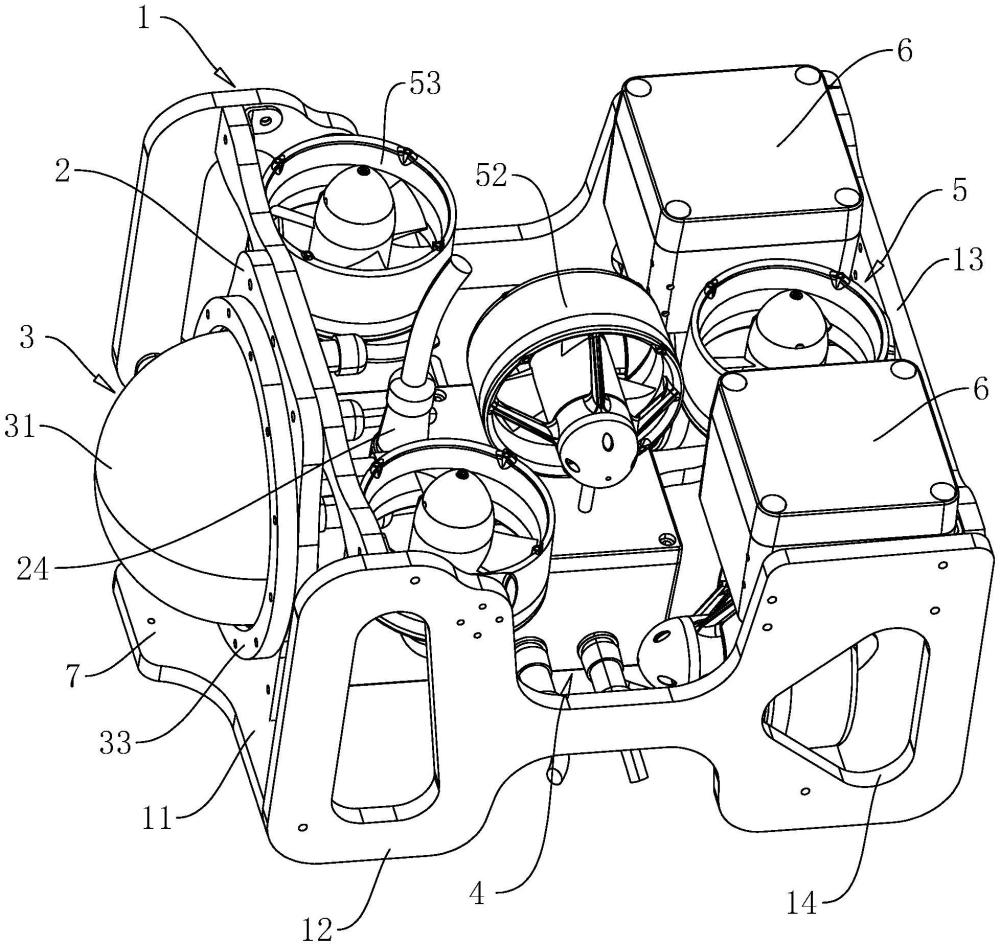
2.根据权利要求1所述的一种轻量化水下机器人,其特征在于:所述水平进退推进器(51)与所述底板(11)相连,分别位于靠近两个所述侧板(12)位置处,所述水平进退推进器(51)的推进方向为第一方向;所述水平横移推进器(52)与所述电源舱(4)的顶部相连,所述水平横移推进器(52)的推进方向为第二方向;所述竖直升降推进器(53)与所述侧板(12)或所述连接板(13)相连,所述竖直升降推进器(53)的推进方向为第三方向;所述第一方向、第二方向与所述第三方向均互相垂直。
3.根据权利要求2所述的一种轻量化水下机器人,其特征在于:所述电源舱(4)包括舱体(41)和舱盖(42),所述舱体(41)与所述舱盖(42)通过螺栓连接,所述舱体(41)与所述底板(11)连接,所述舱体(41)靠近固定板(2)一端与固定板(2)抵接。
4.根据权利要求3所述的一种轻量化水下机器人,其特征在于:所述固定板(2)开设有第一安装孔(22)和多个穿线孔(23),多个穿线孔(23)与若干竖直升降推进器(53)和若干水平横移推进器(52)一一对应,所述第一安装孔(22)于电源舱(4)端部位置处延伸至所述电源舱(4)内部,连通所述镜头舱与所述电源舱(4)。
5.根据权利要求4所述的一种轻量化水下机器人,其特征在于:所述舱盖(42)顶部开设有用于安装插座(24)的第二安装孔(43),所述第二安装孔(43)位于远离所述第一安装孔(22)位置处。
6.根据权利要求1所述的一种轻量化水下机器人,其特征在于:所述侧板(12)与所述底板(11)和所述连接板(13)的连接位置处均螺栓连接有角铁(15)。
7.根据权利要求1所述的一种轻量化水下机器人,其特征在于:所述密封罩(3)靠近所述固定板(2)一侧安装有密封圈,密封罩(3)与固定板(2)夹紧密封圈实现镜头舱的密封。
8.根据权利要求1所述的一种轻量化水下机器人,其特征在于:所述底板(11)对应密封罩(3)下方位置处向外延伸形成安装平台(7),所述安装平台(7)开设有装配孔。
9.根据权利要求1所述的一种轻量化水下机器人,其特征在于:还包括多个浮力舱(6),所述浮力舱(6)于所述外框(1)内与所述外框(1)相连。
技术总结本申请涉及一种轻量化水下机器人,属于水下机器人领域,包括外框,外框包括底板和两个侧板,两个侧板于底板相对的两侧与底板相连,两个侧板之间设置有两个连接板,连接板两端分别与两个侧板固定连接;底板与侧板均开设有若干减重槽;固定板,固定板连接于连接板的外侧与底板相连,固定板远离连接板的一侧安装有密封罩,密封罩与固定板相连形成镜头舱;电源舱,电源舱与固定板远离镜头舱一侧连接,同时电源舱与底板连接;多组推进器,多组推进器分为能够实现水下机器人的升降、俯仰、进退、偏航、横移和横滚。本申请具有简化机器人结构,从而减轻机器人的重量,保证机器人在水下的敏捷和灵活的效果。技术研发人员:李东杰,李俊贤,何欢,文信霖受保护的技术使用者:青岛策海自动化科技有限公司技术研发日:20240116技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/226963.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表