一种近海水下搜救仓的制作方法
- 国知局
- 2024-08-01 07:22:10
本发明属于水下救援,具体涉及一种近海水下搜救仓。
背景技术:
1、近海事故涉及多种类型,包括船舶事故、潜水事故、海上运输事故等。当近海事故发生时,及时有效的搜救行动至关重要。搜救团队需要具备专业的技能和设备,能够迅速定位失踪人员并展开救援。
2、近海事故采用的救援设备,按照使用人数可分为单人设备和团队设备,如下:
3、1、单人设备:如专业的潜水装备,如呼吸器、潜水服、潜水镜和手套等;声呐设备用于在水下发送和接收声波,以探测失踪者的位置;无人潜水器可以远程控制或自主导航,配备摄像头和其他传感器,用于在水下环境中进行搜索和定位;
4、2、团队设备:如民用小型潜艇,可多人驾驶潜入几十米或上百米,携带若干潜水员出仓展开水下搜救;或是采用救援船吊放的水下搜救仓,该搜救仓内部设独立电源、氧气供应设备、若干潜水设备等,并开设有双密封的仓门,方便潜水员进出。
5、近海水下搜救过程,救援团队在水下采用水下搜救仓搭配无人潜水器,多个方位同时探测,而无人潜水器往往要通过线缆进行水下通讯和供电,这些线缆利用卷绕轮收放,设置在水下搜救仓外部容易造成阻碍,改为水下搜救仓内部则会刮擦线缆,给水下搜救仓搭配无人潜水器联合救援带来了一定的难度。为此,我们提出一种能够与若干无人潜水器搭配良好的近海水下搜救仓。
技术实现思路
1、本发明的目的是提供一种近海水下搜救仓,能够完成若干水下机器人及其线缆的送出、行进、返回和回收,彼此配合顺畅,有利于便捷开展仓体搭配水下机器人联合救援。
2、本发明采取的技术方案具体如下:
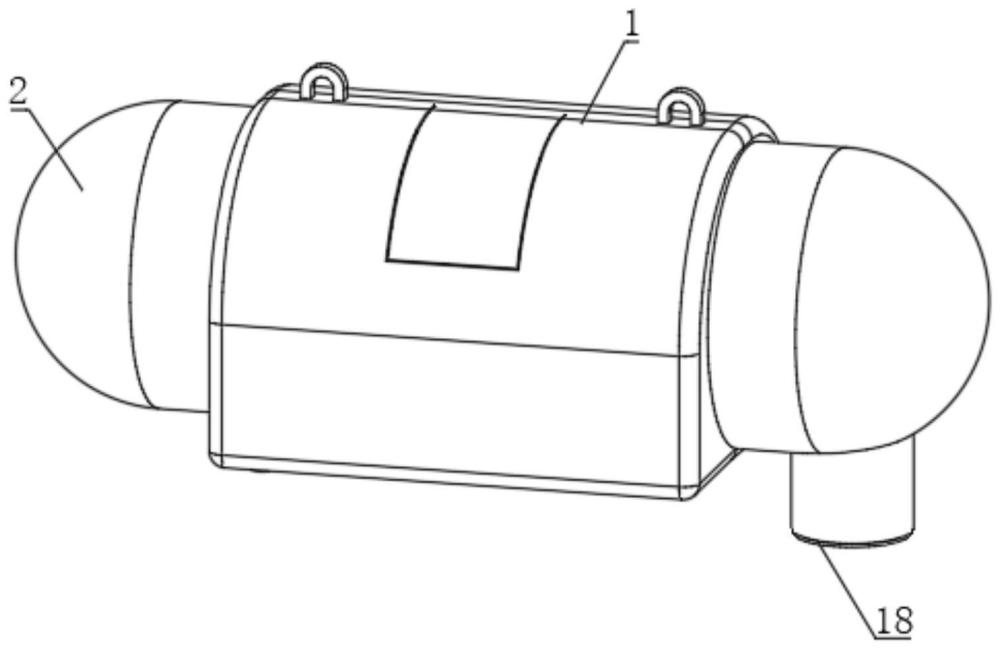
3、一种近海水下搜救仓,包括仓体,还包括:
4、配电室,所述配电室开设在仓体一端且其内部固定有锂电池和中控电脑;
5、容纳筒,若干所述容纳筒沿圆周阵列分布在仓体内部且开口处均延伸出仓体内部,所述容纳筒内部均按照从上到下依次设置有升降机构、顶板、收卷盘及盖板,所述升降机构均部分朝上穿出容纳筒且延伸进仓体,所述升降机构和顶板均固定连接,所述顶板下表面均固定有用于旋转收卷盘的旋转机构,所述盖板上表面和顶板一侧之间固定有安装板;
6、水下机器人,若干所述水下机器人均坐落在对应盖板上表面且正对顶板;
7、抽水机构,所述抽水机构设置仓体内部且用于连通仓体外部和容纳筒内部,可用救援船的吊机吊起仓体,进行近海救援时,先对仓体进行增压,放入救援点海水,直至到达指定深度才停止,再启动抽水机构将海水泵入容纳筒进行二次增压,使容纳筒内部压力和外界海水压强平衡,降下顶板、收卷盘、盖板、安装板及水下机器人,救援人员可在配电室用中控电脑操作水下机器人以仓体为中心点呈扇形朝外行进搜索,自由拉动收卷盘上的线缆,来扩大搜救范围;完成搜救任务后,控制旋转机构正转收卷盘收卷线缆,而水下机器人同步返程,停放在所属盖板上,最后升起顶板、收卷盘、盖板、安装板及水下机器人,使盖板盖住并封闭所述容纳筒,能够完成若干水下机器人及其线缆的送出、行进、返回和回收,彼此配合顺畅,有利于便捷开展仓体搭配水下机器人联合救援。
8、所述抽水机构包括连通固定在容纳筒上表面的硬管,所述硬管远离容纳筒的一端均朝下延伸出仓体内部,所述硬管上均连通固定有水泵,所述水泵均固定在仓体内部,入水时,可启动水泵沿硬管抽吸海水泵入所属容纳筒,而容纳筒均被所属盖板封闭,故能增压,救援结束后,可反向抽吸所属容纳筒内的海水泵回大海,进行减压,降低吊升负重。
9、所述硬管上均连通固定有电动水阀,所述电动水阀均位于相邻容纳筒和水泵之间。
10、所述升降机构包括固定在容纳筒内部的液压缸,所述液压缸液压杆均朝下固定连接于顶板上表面,所述液压缸缸底均朝上延伸出对应容纳筒内部且均固定有支撑板,所述支撑板两端均朝下翻折且均可拆卸的固定连接于相邻容纳筒上表面,水下搜救时,由中控电脑控制液压缸液压杆伸长,将水下机器人从所属容纳筒中送出,反之,可控制液压缸液压杆缩短,将水下机器人送回所属容纳筒,节约人工手动移送水下机器人的操作步骤。
11、所述液压缸液压杆均套设有与容纳筒固定连接的防水衬套。
12、所述旋转机构包括固定在顶板下表面的防水密封箱,所述防水密封箱内部均固定有伺服电机,所述伺服电机输出端均水平延伸出对应防水密封箱内部且均沿轴向固定连接于相邻收卷盘端面,水下搜救时,由中控电脑控制伺服电机正转收卷盘,放出线缆,随水下机器人的行进来延伸,结束搜救时,可反转收卷盘收卷线缆,随水下机器人没入所属容纳筒。
13、本发明取得的技术效果为:
14、本发明的一种近海水下搜救仓,可用救援船的吊机吊起仓体,进行近海救援时,先对仓体进行增压,放入救援点海水,直至到达指定深度才停止,再启动抽水机构将海水泵入容纳筒进行二次增压,使容纳筒内部压力和外界海水压强平衡,降下顶板、收卷盘、盖板、支撑板及水下机器人,救援人员可在配电室用中控电脑操作水下机器人以仓体为中心点呈扇形朝外行进搜索,自由拉动收卷盘上的线缆,来扩大搜救范围;完成搜救任务后,控制旋转机构正转收卷盘收卷线缆,而水下机器人同步返程,停放在所属盖板上,最后升起顶板、收卷盘、盖板、支撑板及水下机器人,使盖板盖住并封闭所述容纳筒,能够完成若干水下机器人及其线缆的送出、行进、返回和回收,彼此配合顺畅,有利于便捷开展仓体搭配水下机器人联合救援。
15、本发明的一种近海水下搜救仓,入水时,可启动水泵沿硬管抽吸海水泵入所属容纳筒,而容纳筒均被所属盖板封闭,故能增压,救援结束后,可反向抽吸所属容纳筒内的海水泵回大海,进行减压,降低吊升负重。
16、本发明的一种近海水下搜救仓,水下搜救时,由中控电脑控制液压缸液压杆伸长,将水下机器人从所属容纳筒中送出,反之,可控制液压缸液压杆缩短,将水下机器人送回所属容纳筒,节约人工手动移送水下机器人的操作步骤。
17、本发明的一种近海水下搜救仓,水下搜救时,由中控电脑控制伺服电机正转收卷盘,放出线缆,随水下机器人的行进来延伸,结束搜救时,可反转收卷盘收卷线缆,随水下机器人没入所属容纳筒。
技术特征:1.一种近海水下搜救仓,包括仓体(1),其特征在于:还包括:
2.根据权利要求1所述的一种近海水下搜救仓,其特征在于:所述抽水机构包括连通固定在容纳筒(3)上表面的硬管(9),所述硬管(9)远离容纳筒(3)的一端均朝下延伸出仓体(1)内部,所述硬管(9)上均连通固定有水泵(10),所述水泵(10)均固定在仓体(1)内部。
3.根据权利要求2所述的一种近海水下搜救仓,其特征在于:所述硬管(9)上均连通固定有电动水阀(11),所述电动水阀(11)均位于相邻容纳筒(3)和水泵(10)之间。
4.根据权利要求2所述的一种近海水下搜救仓,其特征在于:所述硬管(9)延伸出仓体(1)内部的一端均固定有过滤网(12)。
5.根据权利要求1所述的一种近海水下搜救仓,其特征在于:所述升降机构包括固定在容纳筒(3)内部的液压缸(13),所述液压缸(13)液压杆均朝下固定连接于顶板(4)上表面,所述液压缸(13)缸底均朝上延伸出对应容纳筒(3)内部且均固定有支撑板(14),所述支撑板(14)两端均朝下翻折且均可拆卸的固定连接于相邻容纳筒(3)上表面。
6.根据权利要求5所述的一种近海水下搜救仓,其特征在于:所述液压缸(13)液压杆均套设有与容纳筒(3)固定连接的防水衬套(15)。
7.根据权利要求1所述的一种近海水下搜救仓,其特征在于:所述旋转机构包括固定在顶板(4)下表面的防水密封箱(16),所述防水密封箱(16)内部均固定有伺服电机(17),所述伺服电机(17)输出端均水平延伸出对应防水密封箱(16)内部且均沿轴向固定连接于相邻收卷盘(5)端面。
8.根据权利要求1所述的一种近海水下搜救仓,其特征在于:所述仓体(1)远离配电室(2)的一端贯穿固定有过渡舱(18),所述过渡舱(18)为两端开门结构。
9.根据权利要求1所述的一种近海水下搜救仓,其特征在于:所述容纳筒(3)开口处均固定有呈环状的密封条(19)。
10.根据权利要求1所述的一种近海水下搜救仓,其特征在于:所述盖板(6)上表面均间隔固定有两个弹性条(20),两个相邻所述弹性条(20)远离相邻安装板(7)的一端均呈八字形张开。
技术总结本发明属于水下救援技术领域,具体涉及一种近海水下搜救仓,包括仓体,还包括:配电室;容纳筒,若干容纳筒沿圆周阵列分布在仓体内部且开口处均延伸出仓体内部,容纳筒内部均按照从上到下依次设置有升降机构、顶板、收卷盘及盖板,升降机构均部分朝上穿出容纳筒且延伸进仓体,升降机构和顶板均固定连接,顶板下表面均固定有用于旋转收卷盘的旋转机构,盖板上表面和顶板一侧之间固定有安装板;水下机器人,若干水下机器人均坐落在对应盖板上表面且正对顶板;抽水机构。本发明能够完成若干水下机器人及其线缆的送出、行进、返回和回收,彼此配合顺畅,有利于便捷开展仓体搭配水下机器人联合救援。技术研发人员:朱雨鋆,吴雷振,龚国茂,李盈受保护的技术使用者:安徽宏强通用设备有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/227289.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表