一种牵引车与自动导向搬运车组合的全挂车系统的制作方法
- 国知局
- 2024-08-01 07:38:13
本发明属于全挂车。
背景技术:
1、在自动驾驶技术的迅猛发展下,封闭园区和港口的货物运输正逐步向自动化转型。然而,现有的自动驾驶车辆在市政道路和高速公路上的应用受到法律法规的限制,无法实现完全无人驾驶。因此有必要提供一种既能够在封闭园区内实现无人驾驶,又能在市政道路和高速公路上行驶的全挂车方案,这一方案可以满足全流程货物运输的需求。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明的目的在于提出一种牵引车与自动导向搬运车组合的全挂车系统,用于进行全流程货物运输。
3、为达上述目的,本发明第一方面实施例提出了一种牵引车与自动导向搬运车组合的全挂车系统,包括:
4、受拖车,用于货物的运输与搬运;
5、牵引车,用于牵引所述受拖车在市政道路和高速公路上行驶;
6、连结装置,用于实现所述牵引车与所述受拖车的连结与解耦。
7、另外,根据本发明上述实施例的一种牵引车与自动导向搬运车组合的全挂车系统还可以具有以下附加的技术特征:
8、进一步地,在本发明的一个实施例中,还包括调度模块,用于对整个车队进行实时监控、调度和优化,以提高整体运输效率。
9、进一步地,在本发明的一个实施例中,所述受拖车,包括导航单元、感知单元和实时决策单元,其中,
10、所述导航单元用于定位、导航;
11、所述感知单元用于能够实时识别、分析并适应不同的环境;
12、所述实时决策单元用于基于所述环境根据法规要求智能切换驾驶模式,以确保在公共道路上的安全合规行驶。
13、进一步地,在本发明的一个实施例中,所述牵引车,包括导航单元、自动充电单元,其中,
14、所述导航单元用于通过地图数据、卫星定位和先进的路径规划算法,实现自动驾驶的高精度导航;
15、所述自动充电单元用于在运输过程中进行智能充电,以确保系统的持续稳定运行。
16、进一步地,在本发明的一个实施例中,所述连结装置,包括连结单元、解耦单元。
17、进一步地,在本发明的一个实施例中,所述连结单元,用于:
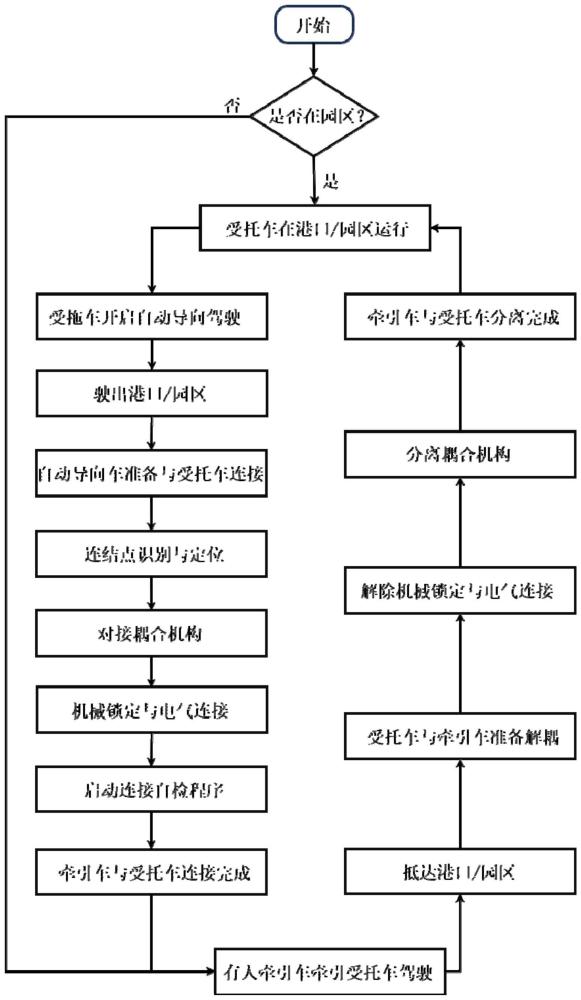
18、在牵引车与受拖车靠近时,通过传感器和自动驾驶控制系统实现精准定位,通过相机、激光雷达靠近连结靶点位置;
19、将所述牵引车上的耦合机构与所述受拖车上的耦合机构相互对接;
20、通过机械锁定和电气连接,确保所述牵引车与所述受拖车的牢固连结;
21、启动自检程序,确保连结装置正常工作,以及所述牵引车与所述受拖车之间的信号传输畅通;
22、将所述牵引车和所述受拖车组成整体,准备行驶。
23、进一步地,在本发明的一个实施例中,所述解耦单元,用于:
24、确保所述牵引车与所述受拖车处于停止状态,并设置警示标志;
25、通过控制系统,解除所述牵引车与所述受拖车之间的机械锁定和电气连接;
26、将所述牵引车上耦合机构与所述受拖车上的耦合机构分离;
27、启动自检程序,确保解耦过程顺利完成,避免所述牵引车与所述受拖车之间发生信号干扰;
28、将所述牵引车和所述受拖车分离,各自独立驾驶。
29、本发明实施例提出的牵引车与自动导向搬运车组合的全挂车系统,依赖于车辆分布式动力系统,将受拖车设计成自带动力和园区自动驾驶能力的模块。在港口或物流园区中,受拖车作为自动导向搬运车,可以进行自动驾驶,在驶出港口和园区后,受拖车由有人驾驶的牵引车牵引,在市政道路和高速公路上行驶。
技术特征:1.一种牵引车与自动导向搬运车组合的全挂车系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,还包括调度模块,用于对整个车队进行实时监控、调度和优化,以提高整体运输效率。
3.根据权利要求1所述的系统,其特征在于,所述受拖车,包括导航单元、感知单元和实时决策单元,其中,
4.根据权利要求1所述的系统,其特征在于,所述牵引车,包括导航单元、自动充电单元,其中,
5.根据权利要求1所述的系统,其特征在于,所述连结装置,包括连结单元、解耦单元。
6.根据权利要求5所述的系统,其特征在于,所述连结单元,用于:
7.根据权利要求5所述的系统,其特征在于,所述解耦单元,用于:
技术总结本发明提出一种牵引车与自动导向搬运车组合的全挂车系统,包括,受拖车,用于货物的运输与搬运;牵引车,用于牵引所述受拖车在市政道路和高速公路上行驶;连结装置,用于实现所述牵引车与所述受拖车的连结与解耦。通过本发明提出的方法,在港口或物流园区中,受拖车作为自动导向搬运车,可以进行自动驾驶,在驶出港口和园区后,受拖车由有人驾驶的牵引车牵引,在市政道路和高速公路上行驶。技术研发人员:郑少将,蔡泇彤,李冠洲受保护的技术使用者:水木东方(深圳)科技有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/228286.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表