一种爬壁机器人及水冷壁维护机器人的制作方法
- 国知局
- 2024-08-01 07:45:22
本技术涉及机器人,具体而言,涉及一种爬壁机器人及水冷壁维护机器人。
背景技术:
1、爬壁机器人可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,爬壁机器人必须具备吸附和移动两个基本的功能。常用的吸附方式有负压吸附和永磁吸附,其中,负压吸附通过吸盘产生真空负压吸附于壁面上,不受壁面材料的限制;永磁吸附,只适用于吸附导磁性壁面。
2、目前很多大城市标志性的建筑、桥梁吊索、大型电线塔架、卫星发射天线等都是由钢管、角铁等管状零件构成,另外,由于管道连接、工程建设以及运输等需要,需要改变管道的截面形状或者对管道弯曲组合,对其进行检查与维修时是一件非常艰巨又危险的任务,人工检查与维修存在巨大的风险,攀爬机器人在此处就发挥着重要的作用。现有的爬壁机器人,大多数采用履带式爬壁机器人,体积大、笨重且大小不可改变,在遇到变径或者带u形的管道时,爬壁机器人难以应对具有复杂形状和狭小空间的场合,实用性差。
技术实现思路
1、本实用新型提供一种爬壁机器人,存在体积大、笨重且大小不可改变,在遇到变径或者带u形的管道时,爬壁机器人难以应对具有复杂形状和狭小空间的场合,实用性差的技术问题。
2、本实用新型的第一方面提供一种爬壁机器人,包括:
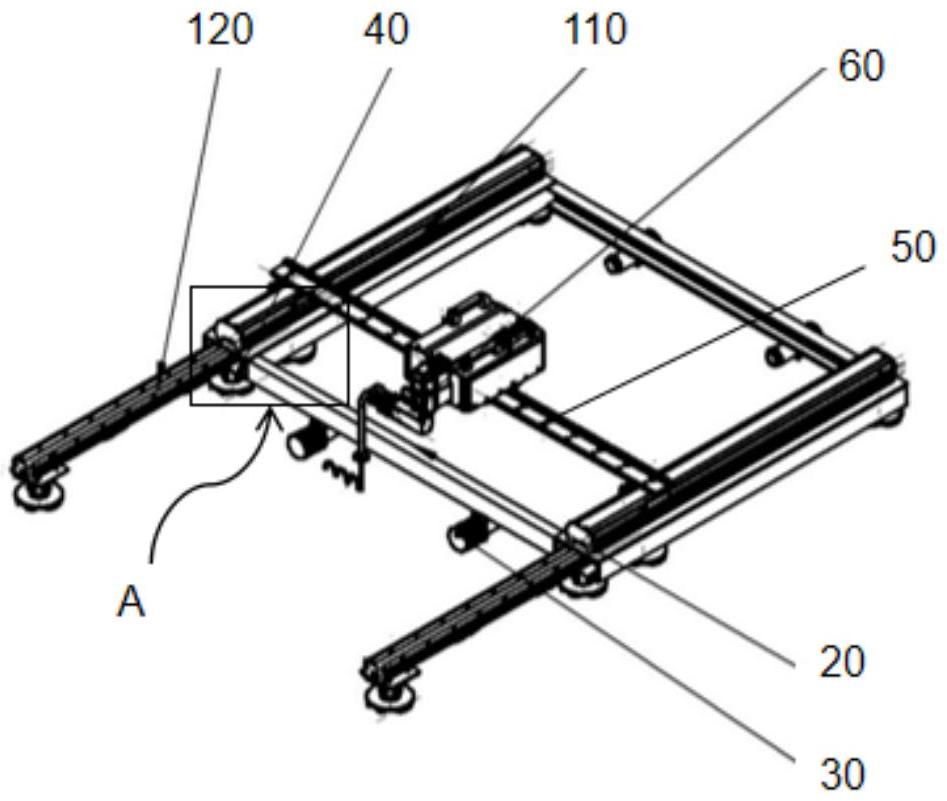
3、第一导轨组件,其具有2组且沿第一方向间隔设置;所述第一导轨组件包括主导轨和副导轨,所述副导轨和所述主导轨沿第二方向可滑动地连接;
4、连接杆,其具有至少2个且沿所述第二方向间隔设置于所述主导轨之间;每个所述连接杆的底端枢接有磁吸轮组件,所述磁吸轮组件包括至少2个磁吸轮且沿所述第一方向间隔设置,至少部分所述磁吸轮传动连接有第一电机,所述第一电机驱动所述磁吸轮沿所述第一方向移动;
5、磁铁组件,其具有多组且沿所述第二方向间隔设置,每组所述磁铁组件包括吊杆、电磁铁和第一弹簧,部分所述吊杆的上端安装于所述主导轨的下端,其余部分所述吊杆的上端安装于所述副导轨的下端;所述电磁铁固设于所述吊杆的下端;部分所述第一弹簧设于所述主导轨和所述电磁铁之间,其余部分所述第一弹簧设于所述副导轨和所述电磁铁之间,且始终具有驱动所述电磁铁沿靠近所述第一导轨组件的下端移动的趋势;
6、其中,所述第二方向和所述第一方向相互垂直,且所述第二方向指所述第一导轨组件的长度方向。
7、本实用新型提供的一种爬壁机器人,一方面,通过设置可相对滑动地主导轨和副导轨,实现第一导轨组件的伸缩,从而可调节爬壁机器人的大小,便于爬壁机器人通过狭小空间,提高爬壁机器人的实用性;另一方面,在主导轨和副导轨上设置磁铁组件,实现电磁铁能够吸附于导磁壁面,增强爬壁机器人与导磁壁面之间的磁吸力,提升爬壁机器人作业的稳定性;此外,还实现电磁铁远离导磁壁面,防止阻碍磁吸轮的移动。
8、进一步地,所述爬壁机器人还包括第二导轨组件,所述第二导轨组件包括滑动导轨和滑块,所述滑动导轨沿所述第二方向滑动连接于所述主导轨,所述滑块用于安装待作业机构。
9、进一步地,所述电磁铁套设有磁铁罩。如此设置,磁铁罩能够对电磁铁起到防护的作用,防止爬壁机器人运动过程中,电磁铁发生碰撞,用以保护电磁铁。
10、进一步地,所述电磁铁的下端连接有导磁板,所述导磁板能够吸附于导磁壁面。
11、进一步地,所述第一导轨组件还包括电动推杆和第二弹簧,所述电动推杆安装于所述主导轨,所述电动推杆的动力输出端能够驱动所述副导轨沿所述主导轨滑动;所述第二弹簧设于所述主导轨的端部和所述副导轨的端部之间,并始终具有驱动所述主导轨沿所述副导轨滑动。
12、本实用新型提供的爬壁机器人,一方面,通过设置电动推杆,实现副导轨相对主导轨的滑动;另一方面,通过设置第二弹簧,实现主导轨相对副导轨的滑动,即实现爬壁机器人的沿第二方向的分段爬行作业。
13、进一步地,所述第一导轨组件包括第二电机、齿轮、齿条和第三弹簧,所述第二电机安装于所述主导轨,所述齿轮连接于所述电机的动力输出端,所述齿条固设于所述副导轨且啮合于所述齿轮;所述第三弹簧设于所述主导轨的端部和所述副导轨的端部之间且始终具有驱动所述主导轨沿所述副导轨滑动。
14、本实用新型实施例提供的爬壁机器人,一方面,通过设置第二电机、齿轮和齿条,实现副导轨相对主导轨的滑动;另一方面,通过设置第三弹簧,实现主导轨相对副导轨的滑动,即实现爬壁机器人的沿第二方向的分段爬行作业。
15、进一步地,所述主导轨具有通孔,所述副导轨可滑动连接于所述通孔;其余部分所述吊杆的上端安装于所述副导轨远离所述主导轨的端部的一端。
16、进一步地,所述主导轨的侧壁面设有滑道,所述副导轨滑动连接于所述滑道。
17、进一步地,所述磁吸轮组件包括支架,所述支架的一端固设于所述连接杆的底端,所述磁吸轮枢接于所述支架的另一端。
18、本实用新型的第二方面提供一种水冷壁维护机器人,包括上述所述的爬壁机器人,所述待作业机构为焊接机器人,所述焊接机器人为四自由度焊接机器人,能够沿所述第一方向移动、沿所述第二方向移动、沿第三方向移动以及沿所述第三方向的转动,其中,所述第三方向均分别垂直于所述第一方向和所述第二方向。
19、本实用新型实施例提供的水冷壁维护机器人,通过在爬壁机器人上设置焊接机器人,实现对水冷壁的自动化焊接,与靠人员手工进行焊接相比,工作效率高,减轻工人的工作强度,保障工人的生命安全;焊接机器人具有多个自由度,能够提高焊接机器人作业的灵活性。
技术特征:1.一种爬壁机器人,其特征在于,包括:
2.根据权利要求1所述的爬壁机器人,其特征在于,所述爬壁机器人还包括第二导轨组件(50),所述第二导轨组件(50)包括滑动导轨和滑块,所述滑动导轨沿所述第二方向滑动连接于所述主导轨(110),所述滑块用于安装所述待作业机构(60)。
3.根据权利要求2所述的爬壁机器人,其特征在于,所述电磁铁(420)套设有磁铁罩(440)。
4.根据权利要求2所述的爬壁机器人,其特征在于,所述电磁铁(420)的下端连接有导磁板(450),所述导磁板(450)能够吸附于导磁壁面。
5.根据权利要求2所述的爬壁机器人,其特征在于,所述第一导轨组件(10)还包括电动推杆和第二弹簧,所述电动推杆安装于所述主导轨(110),所述电动推杆的动力输出端能够驱动所述副导轨(120)沿所述主导轨(110)滑动;所述第二弹簧设于所述主导轨(110)的端部和所述副导轨(120)的端部之间,并始终具有驱动所述主导轨(110)沿所述副导轨(120)滑动;
6.根据权利要求2所述的爬壁机器人,其特征在于,所述主导轨(110)具有通孔,所述副导轨(120)可滑动连接于所述通孔;其余部分所述吊杆(410)的上端安装于所述副导轨(120)远离所述主导轨(110)的端部的一端。
7.根据权利要求2所述的爬壁机器人,其特征在于,所述主导轨(110)的侧壁面设有滑道,所述副导轨(120)滑动连接于所述滑道。
8.根据权利要求2所述的爬壁机器人,其特征在于,所述磁吸轮组件(30)包括支架(310),所述支架(310)的一端固设于所述连接杆(20)的底端,所述磁吸轮(320)枢接于所述支架(310)的另一端。
9.一种水冷壁维护机器人,其特征在于,包括权利要求2-8中任一项所述的爬壁机器人,所述待作业机构(60)为焊接机器人,所述焊接机器人为四自由度焊接机器人,能够沿所述第一方向移动、沿所述第二方向移动、沿第三方向移动以及沿所述第三方向的转动,其中,所述第三方向均分别垂直于所述第一方向和所述第二方向。
技术总结本技术提供一种爬壁机器人及水冷壁维护机器人,爬壁机器人包括第一导轨组件、连接杆和磁铁组件,第一导轨组件包括可滑动地连接主导轨和副导轨;连接杆设置于主导轨之间;连接杆的底端枢接有磁吸轮组件,磁吸轮组件包括至少2个磁吸轮,至少部分磁吸轮传动连接有第一电机,第一电机驱动磁吸轮沿第一方向移动;磁铁组件具有多组且沿第二方向间隔设置,每组磁铁组件包括吊杆、电磁铁和第一弹簧,吊杆安装于主导轨或副导轨的下端,电磁铁固设于吊杆的下端;部分第一弹簧设于主导轨和电磁铁之间,其余部分第一弹簧设于副导轨和电磁铁之间。本技术提供的爬壁机器人,可调节爬壁机器人的大小,便于通过狭小空间,提高爬壁机器人的实用性。技术研发人员:刘福广,张兰庆,刘国刚,常哲,康夜雨,李瑞堂,杨二娟,李勇,刘刚,韩天鹏,张周博,黄修喜,乔燕雄,许有海受保护的技术使用者:西安热工研究院有限公司技术研发日:20231205技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/228841.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。