一种可变形机械腿
- 国知局
- 2024-08-01 07:52:11
本技术涉及特种机器人相关,尤其涉及一种可变形机械腿。
背景技术:
1、特种机器人应用于专业领域,一般由经过专门培训的人员操作或使用的,辅助或代替人执行任务的机器人,在特种机器人行业中,目前的机械腿结构大多数仅承担足式运动或者轮足运动,故此,特别需要一种可变形机械腿。
2、但是在特种机器人行业中,现有的机械腿,因为目前的机械腿结构大多数仅承担足式运动或者轮足运动,尚未出现轮履足三种运动状态全部集成的情况,在使用过程中,缺少一种能够将轮、履、腿全部集成的机械腿结构。
技术实现思路
1、本实用新型的目的在于提供一种可变形机械腿,以解决上述背景技术中提出的现有的大多数机械腿,因为目前的机械腿结构大多数仅承担足式运动或者轮足运动,尚未出现轮履足三种运动状态全部集成的情况,在使用过程中,缺少一种能够将轮、履、腿全部集成的机械腿结构的问题。
2、为实现上述目的,本实用新型提供如下技术方案:该一种可变形机械腿,包括机械腿,所述机械腿的外侧表面安装有履带,所述履带的一侧表面滚动连接有驱动轮,所述履带的一侧表面滚动连接有传动轮,所述履带的一侧表面滚动连接有承重轮,所述履带的一侧表面滚动连接有涨紧轮,所述机械腿的内侧表面转动连接有电机输出轴,所述电机输出轴的一端表面固定连接有主轴,所述主轴的外侧表面滚动连接有空心轴,所述空心轴的外侧表面安装有轮胎,所述电机输出轴的外侧表面安装有大腿板,所述大腿板的一侧表面转动连接有支撑板,所述支撑板的上方表面安装有电机。
3、优选的,所述空心轴的内壁尺寸与主轴的外壁尺寸相吻合,所述主轴与空心轴构成旋转结构,所述空心轴通过履带与驱动轮转动连接,所述空心轴的外壁尺寸与轮胎的内壁尺寸相吻合,所述空心轴与轮胎构成旋转结构。
4、优选的,所述机械腿呈钝角三角形结构,所述涨紧轮与履带构成旋转结构。
5、优选的,所述电机输出轴与大腿板构成旋转结构,所述驱动轮与履带构成旋转结构,所述履带呈钝角三角形结构。
6、优选的,所述传动轮与履带构成旋转结构,且设置有两组,所述承重轮与履带构成旋转结构,且设置有两组。
7、与现有技术相比,本实用新型的有益效果是:该一种可变形机械腿,通过机械腿、履带、驱动轮、传动轮、承重轮、涨紧轮、电机输出轴、主轴、空心轴、轮胎、大腿板、支撑板和电机的设置,首先驱动电机,由电机带动电机输出轴转动,接着有电机输出轴带动主轴转动,然后主轴带动空心轴转动,然后空心轴带动驱动轮转动,有驱动轮带动履带,由履带带动传动轮和承重轮转动,实现履式和轮式的运动,空心轴带动轮带转动,在使用时,既可以平放作为履带进行履式运动,又可以向下支起作为足式运动的小腿,同时安装轮式驱动轮,当其向上收起时,轮胎与地面接触,实现便捷顺滑的轮履腿三态切换,从而提高集成度,减轻重量,这样就可以将轮、履、腿三种结构集中在同一个机械腿上,从而大大简化了对机器人控制的难度,解决了现有技术中,目前的机械腿结构大多数仅承担足式运动或者轮足运动,尚未出现轮履足三种运动状态全部集成的情况,在使用过程中,缺少一种能够将轮、履、腿全部集成的机械腿结构的问题。
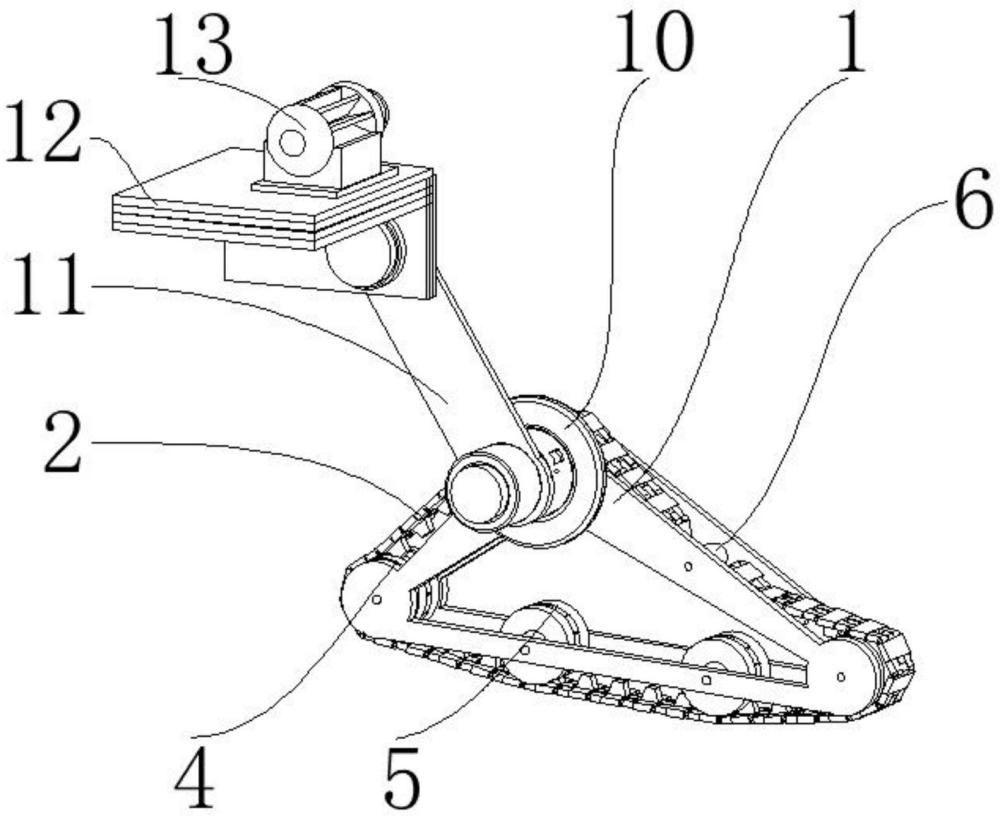
技术特征:1.一种可变形机械腿,包括机械腿(1),其特征在于:所述机械腿(1)的外侧表面安装有履带(2),所述履带(2)的一侧表面滚动连接有驱动轮(3),所述履带(2)的一侧表面滚动连接有传动轮(4),所述履带(2)的一侧表面滚动连接有承重轮(5),所述履带(2)的一侧表面滚动连接有涨紧轮(6),所述机械腿(1)的内侧表面转动连接有电机输出轴(7),所述电机输出轴(7)的一端表面固定连接有主轴(8),所述主轴(8)的外侧表面滚动连接有空心轴(9),所述空心轴(9)的外侧表面安装有轮胎(10),所述电机输出轴(7)的外侧表面安装有大腿板(11),所述大腿板(11)的一侧表面转动连接有支撑板(12),所述支撑板(12)的上方表面安装有电机(13)。
2.根据权利要求1所述的一种可变形机械腿,其特征在于:所述空心轴(9)的内壁尺寸与主轴(8)的外壁尺寸相吻合,所述主轴(8)与空心轴(9)构成旋转结构,所述空心轴(9)通过履带(2)与驱动轮(3)转动连接,所述空心轴(9)的外壁尺寸与轮胎(10)的内壁尺寸相吻合,所述空心轴(9)与轮胎(10)构成旋转结构。
3.根据权利要求1所述的一种可变形机械腿,其特征在于:所述机械腿(1)呈钝角三角形结构,所述涨紧轮(6)与履带(2)构成旋转结构。
4.根据权利要求1所述的一种可变形机械腿,其特征在于:所述电机输出轴(7)与大腿板(11)构成旋转结构,所述驱动轮(3)与履带(2)构成旋转结构,所述履带(2)呈钝角三角形结构。
5.根据权利要求1所述的一种可变形机械腿,其特征在于:所述传动轮(4)与履带(2)构成旋转结构,且设置有两组,所述承重轮(5)与履带(2)构成旋转结构,且设置有两组。
技术总结本技术涉及特种机器人相关技术领域,尤其涉及一种可变形机械腿,包括机械腿,机械腿的外侧安装有履带,履带的一侧滚动连接有驱动轮,履带的一侧滚动连接有传动轮,履带的一侧滚动连接有承重轮,履带的表面滚动连接有涨紧轮,机械腿的内侧转动连接有电机输出轴,电机输出轴的一端固定连接有主轴,主轴的外侧滚动连接有空心轴,空心轴的外侧安装有轮胎,电机输出轴的外侧安装有大腿板,大腿板的一侧转动连接有支撑板,支撑板的上方安装有电机。该一种可变形机械腿,既可以平放作为履带进行履式运动,又可以向下支起作为足式运动的小腿,同时安装轮式驱动轮,当其向上收起时,轮胎与地面接触,实现轮履腿三态切换。技术研发人员:贾亚森,王一飞,李晓,王源昕,张伟涛,余意,刘聪睿受保护的技术使用者:北京理工大学技术研发日:20230920技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/229271.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表