一种履带式多功能车的制作方法
- 国知局
- 2024-08-01 08:05:01
本技术属于多功能车领域,具体涉及一种履带式多功能车。
背景技术:
1、在生产和加工过程中,在工业生产中焊接、打磨和切割等作业占有较大的比重,其加工作业质量的高低严重影响着产品的最终质量;而作业工作在大多数企业中普遍采用人工作业的形式,人工作业不仅效率低,且对操作人员的技术具有较高的要求,因此焊接、打磨和切割等作业质量无法得到保证。尤其是针对中大型设备,需要在一定高度上进行作业时,人工作业更显得不适应,效率低且效果不佳,但是采用传统的作业机器人进行作业时,由于作业机器人一般都固定在特定位置,对于一些室内外不方便移动的设备或物体,也显得作用性不高;并且,轮胎式在室外不能够保证加工作业的平稳,不够安全可靠。
技术实现思路
1、为解决现有技术存在的不足,本实用新型提供了一种履带式多功能车。
2、为实现上述目的,本实用新型提供了以下技术方案:
3、一种履带式多功能车,包括车架和底架,所述车架安装在所述底架的上端,所述车架的上端设有作业机器人,所述底架的两端设有履带结构,所述履带结构包括支撑架,所述支撑架的下端设有若干支撑底轮,所述支撑架的上端设有若干支撑托轮,所述支撑架的外侧套设有履带,所述履带套设在所述支撑底轮和所述支撑托轮的外侧,所述履带的内侧均匀地设有若干导向块,所述支撑架的左端设有驱动电机,所述驱动电机连接有驱动轮,所述驱动轮与所述导向块相匹配。
4、进一步地,所述履带的外侧设有凸块,所述凸块均匀地对称设置于所述履带的两侧,所述凸块呈弧形。
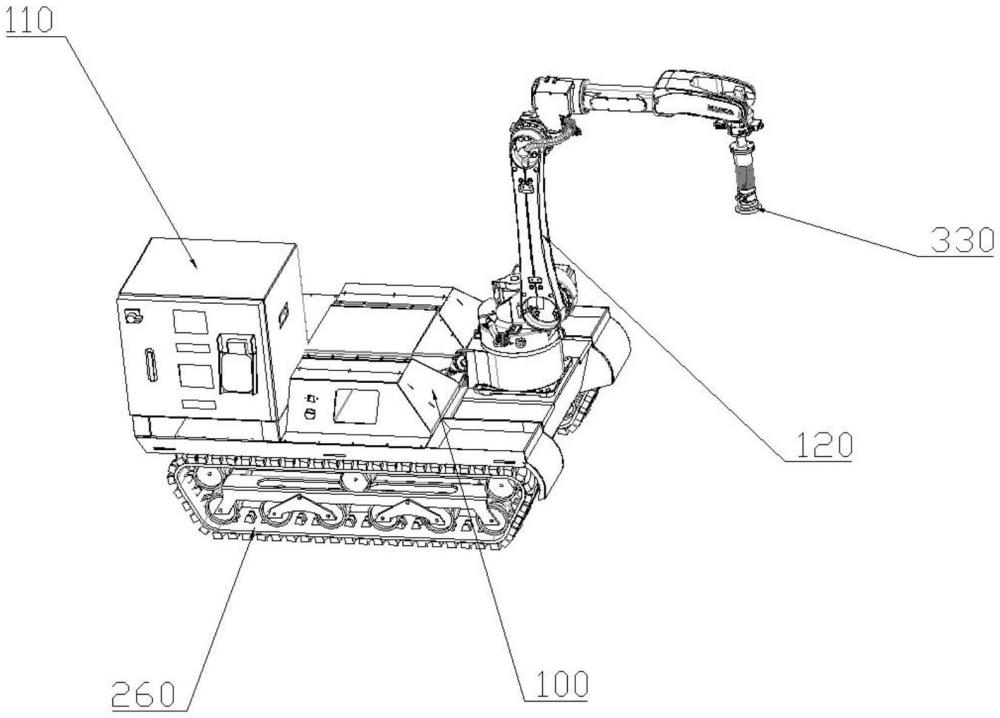
5、进一步地,所述车架的上端设有控制箱,所述控制箱设置在所述车架的左后端,所述作业机器人的末端设有快换盘,所述快换盘的下端设有力控设备,所述力控设备的下端设有平磨机。
6、进一步地,所述车架的上端设有控制箱、焊机和气瓶,所述控制箱设置在所述车架的左后端,所述焊机设置在所述车架的左前端,所述气瓶设置在所述车架的左端,所述作业机器人的末端设有快换盘,所述快换盘的下端设有焊枪,所述焊枪与所述焊机相连接,所述作业机器人的末端设有防火探测器。
7、进一步地,所述车架的上端设有控制箱、切割阀箱和气瓶,所述控制箱设置在所述车架的左后端,所述切割阀箱设置在所述车架的左前端,所述气瓶设置在所述车架的左端,所述作业机器人的末端设有快换盘,所述快换盘的下端设有火焰切割枪,所述火焰切割枪与所述切割阀箱相连接,所述作业机器人的末端设有探针。
8、本实用新型公开的一种履带式多功能车,与现有技术相比,其有益效果在于,其能实现多功能车的自行走,以便将多功能车移至待加工作业的设备或物体前,方便打磨、焊接或切割等加工作业,相较于人工作业,其作业效果和效率均更好;并且,通过履带结构可以适应更多场合上行走,保证其平稳性,在作业加工时可以保证更加稳定和安全。
技术特征:1.一种履带(260)式多功能车,其特征在于,包括车架(100)和底架(200),所述车架(100)安装在所述底架(200)的上端,所述车架(100)的上端设有作业机器人(120),所述底架(200)的两端设有履带(260)结构,所述履带(260)结构包括支撑架(210),所述支撑架(210)的下端设有若干支撑底轮(220),所述支撑架(210)的上端设有若干支撑托轮(230),所述支撑架(210)的外侧套设有履带(260),所述履带(260)套设在所述支撑底轮(220)和所述支撑托轮(230)的外侧,所述履带(260)的内侧均匀地设有若干导向块(261),所述支撑架(210)的左端设有驱动电机(250),所述驱动电机(250)连接有驱动轮(240),所述驱动轮(240)与所述导向块(261)相匹配。
2.根据权利要求1所述的履带(260)式多功能车,其特征在于,所述履带(260)的外侧设有凸块(262),所述凸块(262)均匀地对称设置于所述履带(260)的两侧,所述凸块(262)呈弧形。
3.根据权利要求2所述的履带(260)式多功能车,其特征在于,所述车架(100)的上端设有控制箱(110),所述控制箱(110)设置在所述车架(100)的左后端,所述作业机器人(120)的末端设有快换盘(310),所述快换盘(310)的下端设有力控设备(320),所述力控设备(320)的下端设有平磨机(330)。
4.根据权利要求2所述的履带(260)式多功能车,其特征在于,所述车架(100)的上端设有控制箱(110)、焊机(140)和气瓶(130),所述控制箱(110)设置在所述车架(100)的左后端,所述焊机(140)设置在所述车架(100)的左前端,所述气瓶(130)设置在所述车架(100)的左端,所述作业机器人(120)的末端设有快换盘(310),所述快换盘(310)的下端设有焊枪(340),所述焊枪(340)与所述焊机(140)相连接,所述作业机器人(120)的末端设有防火探测器(350)。
5.根据权利要求2所述的履带(260)式多功能车,其特征在于,所述车架(100)的上端设有控制箱(110)、切割阀箱(150)和气瓶(130),所述控制箱(110)设置在所述车架(100)的左后端,所述切割阀箱(150)设置在所述车架(100)的左前端,所述气瓶(130)设置在所述车架(100)的左端,所述作业机器人(120)的末端设有快换盘(310),所述快换盘(310)的下端设有火焰切割枪(360),所述火焰切割枪(360)与所述切割阀箱(150)相连接,所述作业机器人(120)的末端设有探针。
技术总结本技术公开了一种履带式多功能车,包括车架和底架,所述车架安装在所述底架的上端,所述车架的上端设有作业机器人,所述底架的两端设有履带结构,所述履带结构包括支撑架,所述支撑架的下端设有若干支撑底轮,所述支撑架的上端设有若干支撑托轮,所述支撑架的外侧套设有履带,所述履带套设在所述支撑底轮和所述支撑托轮的外侧,所述履带的内侧均匀地设有若干导向块,所述支撑架的左端设有驱动电机,所述驱动电机连接有驱动轮,所述驱动轮与所述导向块相匹配。本技术提供的一种履带式多功能车,其能实现多功能车的自行走,方便打磨、焊接或切割等加工作业,通过履带结构可以适应更多场合上行走,可以保证更加稳定和安全。技术研发人员:杨安定,梁海风,梁海华,朱加龙受保护的技术使用者:罗博(嘉兴)机器人科技有限公司技术研发日:20231212技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/230304.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表