一种喷涂机器人及其控制方法与流程
- 国知局
- 2024-07-29 12:08:31
本发明涉及表面处理机器人,特别涉及一种喷涂机器人及其控制方法。
背景技术:
1、钢管生产好后,通常会在钢管的壁面做防腐处理,环氧粉末是一种热固性、无毒涂料,其固化时间短,固化后可形成高分子量交联结构涂层,具有优良的防腐性能和较高的机械性能,因此,环氧粉末相比防腐油漆优点多,使得环氧粉末在钢管防腐领域的应用越来越多。
2、现有技术中,采用喷涂机器人对钢管表面进行防腐处理,喷涂机器人先采用高频加热件对钢管表面进行加热,而后采用喷枪向钢管表面喷涂环氧粉末,使环氧粉末在钢管表面固化,形成防腐层;完成钢管表面的喷涂防腐工艺后,一般会对钢管表面的固化层厚度进行检测。
3、现有的检测一般通过人工进行,具体的,采用超声波测厚仪,人工将传感器放置在已冷却的,即已固化的环氧粉末表面上,通过测量超声波从钢管到环氧粉末再返回的时间来计算固化层的厚度;由于钢管为大口径钢管,人工检测的范围有限,且人工检测的效率较低,难以对钢管的固化层厚度进行全方位检测,即存在检测不全面的问题,难以确保后续钢管使用时的防腐效果,影响用户的使用体验。
4、可见,现有技术还有待改进和提高。
技术实现思路
1、鉴于上述现有技术的不足之处,本发明的目的在于提供一种喷涂机器人的控制方法,可实现固化层厚度的全面检测,且可根据所检测的实时厚度信息生成补涂信息,使喷涂机器人可针对性地进行补涂任务。
2、为了达到上述目的,本发明采取了以下技术方案:
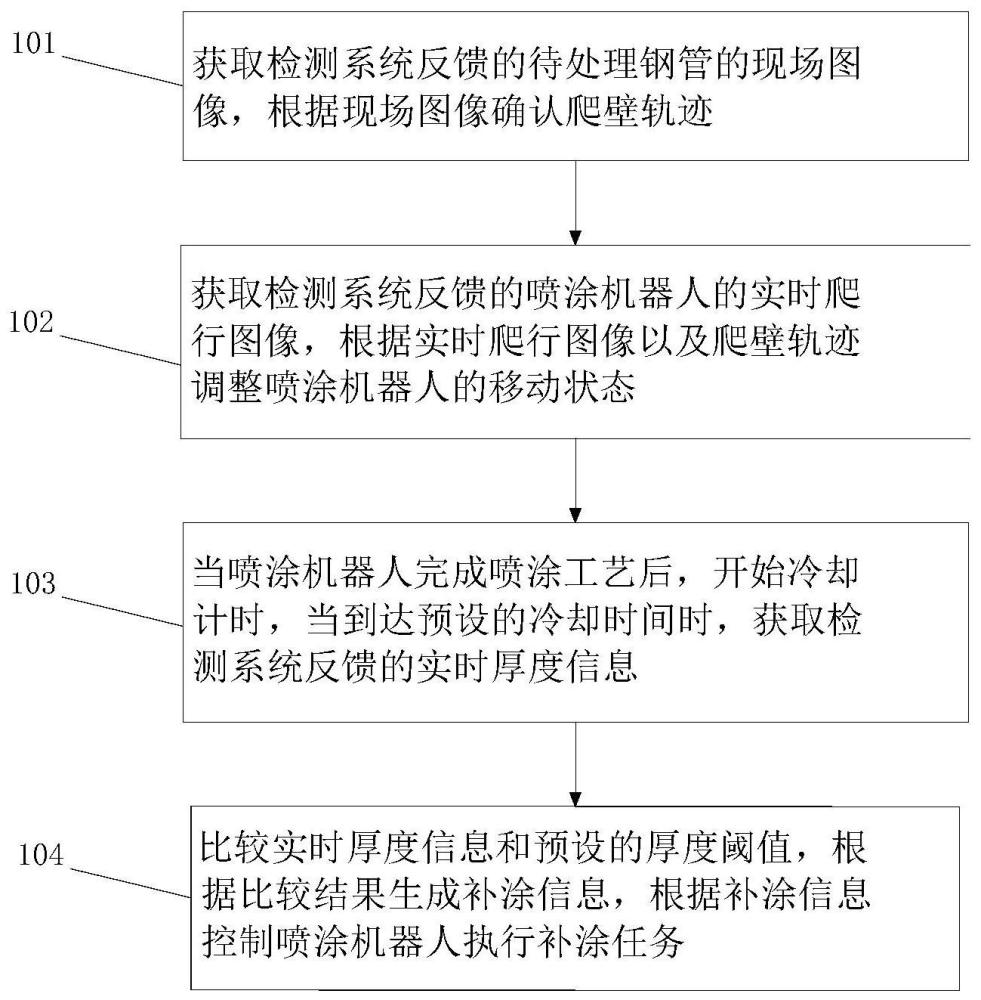
3、本发明第一方面提供了一种喷涂机器人的控制方法,包括:获取检测系统反馈的待处理钢管的现场图像,根据现场图像确认爬壁轨迹;获取检测系统反馈的喷涂机器人的实时爬行图像,根据实时爬行图像以及爬壁轨迹调整喷涂机器人的移动状态;当喷涂机器人完成喷涂工艺后,开始冷却计时,当到达预设的冷却时间时,获取检测系统反馈的实时厚度信息;比较实时厚度信息和预设的厚度阈值,根据比较结果生成补涂信息,根据补涂信息控制喷涂机器人执行补涂任务。
4、可选的,在本发明第一方面的第一种实施方式中,所述获取检测系统反馈的待处理钢管的现场图像,根据现场图像确认爬壁轨迹,具体包括:获取检测系统反馈的待处理钢管的现场图像,对现场图像进行预处理,得到预处理图像;对预处理图像进行提取、识别和检测处理,得到预处理图像中的焊缝区域;获取待处理钢管的设计参数,基于所获取的设计参数以及所得到的焊缝区域生成爬壁轨迹。
5、可选的,在本发明第一方面的第二种实施方式中,所述获取检测系统反馈的待处理钢管的现场图像,对现场图像进行预处理,得到预处理图像,具体包括:获取检测系统反馈的待处理钢管的现场图像,对现场图像进行灰度化处理,得到一次处理图像;对一次处理图像进行边缘检测处理,得到具有边缘特征的二次处理图像;对二次处理图像进行去噪处理,得到预处理图像。
6、可选的,在本发明第一方面的第三种实施方式中,所述对预处理图像进行提取、识别和检测处理,得到预处理图像中的焊缝区域,具体包括:基于计算机视觉算法,从预处理图像中识别焊缝的特征信息,得到特征图像;将特征图像输入至基于卷积神经网络构建的识别模型中,得到标记图像;应用目标检测算法在标记图像中定位焊缝区域并框出边界框。
7、可选的,在本发明第一方面的第四种实施方式中,所述获取待处理钢管的设计参数,基于所获取的设计参数以及所得到的焊缝区域生成爬壁轨迹,具体包括:获取待处理钢管的设计参数,所述设计参数包括钢管的几何形状、尺寸、管道曲率和斜率;基于待处理钢管的设计参数以及所得到的焊缝区域,采用轨迹规划算法生成爬壁轨迹。
8、可选的,在本发明第一方面的第五种实施方式中,所述获取检测系统反馈的喷涂机器人的实时爬行图像,根据实时爬行图像与所生成的爬壁轨迹,确认喷涂机器人是否存在轨迹偏移问题;当存在偏移问题时,计算轨迹偏差,根据轨迹偏差调整喷涂机器人的移动状态。
9、可选的,在本发明第一方面的第六种实施方式中,所述获取检测系统反馈的喷涂机器人的实时爬行图像,所述实时爬行图像包括在预设的检测时间内所捕获的连续图像帧;基于实时爬行图像,采用基于图像特征的运动估计算法,计算喷涂机器人的实际移动路径;计算实际移动路径和所生成的爬壁轨迹之间的直线偏移距离,比较所计算的直线偏移距离和预设偏移阈值,当所计算的直线偏移距离≥预设偏移阈值时,存在轨迹偏移问题,反之,不存在轨迹偏移问题。
10、可选的,在本发明第一方面的第七种实施方式中,所述当存在偏移问题时,计算轨迹偏差,根据轨迹偏差调整喷涂机器人的移动状态,具体包括:当存在偏移问题时,根据所计算的直线偏移距离,采用局部路径规划算法生成调整路径;根据所生成的调整路径,调整喷涂机器人的移动状态,包括调整喷涂机器人的移动速度和转向角度。
11、可选的,在本发明第一方面的第八种实施方式中,所述比较实时厚度信息和预设的厚度阈值,根据比较结果生成补涂信息,根据补涂信息控制喷涂机器人执行补涂任务,具体包括:比较实时厚度信息和预设的厚度阈值,所述实时厚度信息包括多个空间点的厚度数据,当任一空间点的厚度数据<预设的厚度阈值时,标记该空间点,并计算与该空间点对应的偏差值;根据所标记的空间点,采用路径规划算法生成补涂路径;根据所计算的、与空间点对应的偏差值,生成控制参数,所述控制参数用于控制喷涂机器人的喷涂压力和移动速度;整合补涂路径和控制参数,得到补涂信息,根据补涂信息控制喷涂机器人执行补涂任务。
12、本发明第二方面提供了一种喷涂机器人,包括控制系统,所述控制系统包括存储器和至少一个处理器,所述存储器中存储有指令;
13、至少一个所述处理器调用所述存储器中的所述指令,以使得所述喷涂机器人执行如上任一所述的控制方法的各个步骤。
14、有益效果:
15、本发明提供了一种喷涂机器人的控制方法,通过获取检测系统反馈的待处理钢管的现场图像以确认爬壁轨迹;获取检测系统反馈的喷涂机器人的实时爬行图像,根据实时爬行图像以及爬壁轨迹调整喷涂机器人的移动状态;当喷涂机器人完成喷涂工艺后,且当到达预设的冷却时间时,获取检测系统反馈的实时厚度信息;比较实时厚度信息和预设的厚度阈值,根据比较结果生成补涂信息,根据补涂信息控制喷涂机器人执行补涂任务;本申请公开的方法,通过检测系统可对完成喷涂工艺的钢管表面进行全面的固化层厚度检测,且可根据所检测的实时厚度信息生成补涂信息,使喷涂机器人可针对性地对待处理钢管进行补涂任务,提高喷涂后钢管各个位置的固化层的均匀性,使喷涂后的钢管具有较佳的防腐效果。
技术特征:1.一种喷涂机器人的控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种喷涂机器人的控制方法,其特征在于,所述获取检测系统反馈的待处理钢管的现场图像,根据现场图像确认爬壁轨迹,具体包括:
3.根据权利要求2所述的一种喷涂机器人的控制方法,其特征在于,所述获取检测系统反馈的待处理钢管的现场图像,对现场图像进行预处理,得到预处理图像,具体包括:
4.根据权利要求2所述的一种喷涂机器人的控制方法,其特征在于,所述对预处理图像进行提取、识别和检测处理,得到预处理图像中的焊缝区域,具体包括:
5.根据权利要求2所述的一种喷涂机器人的控制方法,其特征在于,所述获取待处理钢管的设计参数,基于所获取的设计参数以及所得到的焊缝区域生成爬壁轨迹,具体包括:
6.根据权利要求1所述的一种喷涂机器人的控制方法,其特征在于,所述获取检测系统反馈的喷涂机器人的实时爬行图像,根据实时爬行图像以及爬壁轨迹调整喷涂机器人的移动状态,具体包括:
7.根据权利要求6所述的一种喷涂机器人的控制方法,其特征在于,所述,具体包括:
8.根据权利要求7所述的一种喷涂机器人的控制方法,其特征在于,所述当存在偏移问题时,计算轨迹偏差,根据轨迹偏差调整喷涂机器人的移动状态,具体包括:
9.根据权利要求1所述的一种喷涂机器人的控制方法,其特征在于,所述比较实时厚度信息和预设的厚度阈值,根据比较结果生成补涂信息,根据补涂信息控制喷涂机器人执行补涂任务,具体包括:
10.一种喷涂机器人,所述喷涂机器人包括控制系统,其特征在于,所述控制系统包括存储器和至少一个处理器,所述存储器中存储有指令;
技术总结本发明公开了一种喷涂机器人及其控制方法,所述控制方法包括:获取检测系统反馈的待处理钢管的现场图像以确认爬壁轨迹;获取检测系统反馈的喷涂机器人的实时爬行图像,根据实时爬行图像以及爬壁轨迹调整喷涂机器人的移动状态;当喷涂机器人完成喷涂工艺后,且当到达预设的冷却时间时,获取检测系统反馈的实时厚度信息;比较实时厚度信息和预设的厚度阈值,根据比较结果生成补涂信息,根据补涂信息控制喷涂机器人执行补涂任务;本申请公开的方法,通过检测系统可对完成喷涂工艺的钢管表面进行全面的固化层厚度检测,且可根据所检测的实时厚度信息生成补涂信息,使喷涂机器人可针对性地进行补涂任务,确保喷涂后的钢管具有较佳的防腐效果。技术研发人员:徐庆,罗术华,杨晓强,赖柏宇受保护的技术使用者:佛山市汇灿机械设备有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/139441.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。