一种具有无线充电功能的无人船的制作方法
- 国知局
- 2024-08-05 12:31:08
本技术涉及无人船载无人机,具体涉及一种具有无线充电功能的无人船。
背景技术:
1、无人船和无人机作为两种在不同介质中运行的机器人一方面各自具有不同的运行原理和动作,另一方面又需要协同航行和互动。常态化工作中,二者在大部分时间里是“母舰载体”和“乘客”的关系,个别情况下又是分别作业和相对运动的关系,无人机通电后,陀螺仪需要在静止状态下进行自检,无人船在江面或者湖面由于水波的影响造成无人船不可能像在陆地一样处于完全静止状态,通常情况下无人机直接安装在无人船上无法通过自检。在无人机降落至起降平台的过程中,由于水波对船体造成的晃动在无人机接触平台瞬间可能导致无人机侧向滑动引起与无人船船体碰撞或落入水中,造成降落失败。
2、现提出一种具有无线充电功能的无人船,来自动化实现无人机稳定在无人船上起降,并实现对无人机进行无线充电。
技术实现思路
1、为解决上述技术问题,本实用新型所采用的技术方案是:
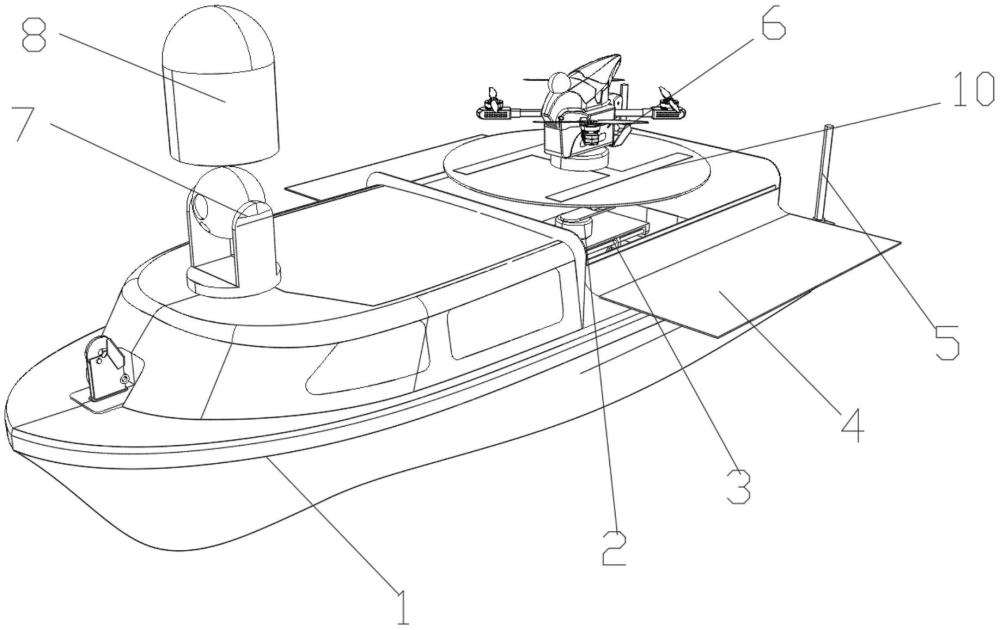
2、一种具有无线充电功能的无人船,包括无人船,所述无人船的一侧内部固定安装有蜗杆升降机,所述蜗杆升降机的顶部固定安装有云台机构,所述云台机构的顶部固定安装有起降平台,所述起降平台的顶部放置有无人机,所述无人机的底部设置有无线充电rx端;所述云台机构包括有第三云台步进电机。
3、本实用新型技术方案的进一步改进在于:所述无人船的左端顶部设置有船载云台摄像头,所述船载云台摄像头的外表面套设有船用玻璃罩,所述无人船的右端两侧活动安装有机舱,所述无人船的右端设置有通信模块,所述无人船的底部右端固定安装有涵道推进器。
4、本实用新型技术方案的进一步改进在于:所述无人船的动力推进模式通过涵道推进器采用差动推进,防水草、渔网。
5、本实用新型技术方案的进一步改进在于:所述无人船通过通信模块实现g网络控制在水域展开巡检工作,控制端在任意有g网络场所。
6、本实用新型技术方案的进一步改进在于:所述无人机的内部设置有锂离子电池,所述锂离子电池的左侧且位于无人机的左侧上活动安装有电池仓盖,所述无人机的顶部设置有机载云台摄像头,所述机载云台摄像头的外表面且位于无人机的顶部套设有玻璃罩,所述无人机的底部设置有无线充电rx端。
7、本实用新型技术方案的进一步改进在于:所述无人机基于g/g网络的远程自动化控制,所述无线充电rx端包括有mcu,整流桥,ldo,charger芯片,以及lc谐振tank。
8、本实用新型技术方案的进一步改进在于:所述第三云台步进电机的顶部设置有第二云台步进电机,所述第二云台步进电机的左端设置有第一云台步进电机,所述第一云台步进电机的一端固定安装有无线充电tx端,所述无线充电tx端的顶部固定安装起降平台。
9、本实用新型技术方案的进一步改进在于:所述无线充电tx端包括有mcu,功率全桥,以及由电感和电容组成的lc谐振tank,所述云台机构采用的步进电机主要通过ats单片机作为控制核心,并由ats单片机产生相应的脉冲信号,通过i/o端口输出,送到驱动芯片ln对脉冲信号进行梳理。
10、由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
11、1、本实用新型提供一种具有无线充电功能的无人船,三轴云台化的起降平台系统为无人机提供了一个完全静止的起降平台。完美的克服了以上的由于水面晃动给无人机带来的起降困难等问题,该起降平台系统分为运行和待机2种状态。运行模式下3轴云台系统一直处于工作状态。平台无人机接触面一直保持水平稳定状态,此工作状态仅运用于无人机起飞及降落阶段,通过后台程序全自动控制平台的启动及停止,其他时段该平台均为待机状态。尽可能减小平台运行平均功耗,从而提升无人船运行时间。
12、2、本实用新型提供一种具有无线充电功能的无人船,云台通过陀螺仪与加速度计得出角速度与角度,再输入到pi d控制器进行调节,最后输出是采用步进电机细分的矢量合成方法。同时引入反馈编码器便可测出电机转子的精确位置与速度,对电机进行矢量控制,使控制更高效,精确。自主降落:无人机与无人船的双向定位,通过差分gps系统,及数传系统,2者间能够互相传输彼此的准确坐标信息。因此相互间定位能够准确的传输至船体的核心控制器。在无人机执行完任务进行返航时提供目标信息点。
13、3、本实用新型提供一种具有无线充电功能的无人船,无人机外出执行任务时无人船在原地并未移动。在该模式下无人机为定点降落,主要依靠视觉识别系统对降落平台进行定位。为保证系统的可靠性,该系统考虑做双冗余模式,加入差分gps辅助定位。在视觉系统受外界干扰时,差分gps定位精度到厘米级也可作为主要降落定位模式。模式二:无人机外出执行任务时无人船按预定规划路线继续行驶。在该模式下的无人机为在运动物体上降落,难度较高。稍有不慎无人机将会掉入水中。因此为保证系统稳定性,双冗余系统中其一如果出现故障,无人船将会进入第一种模式一,自动停止前行。
14、4、本实用新型提供一种具有无线充电功能的无人船,无人机降落回平台后,平台拥有升降功能,当平台落入船舱以后,充电复位装置开始运行,将无人机精确的定位至充电点,此时控制链路模块将无人机断电。无线充电模组开始运行,无人机端bms模块通过无人机底部无线充电模块的接入对无人机进行充电。充电结束后,通过控制链路程序bms及无线模块自行断开电源。
15、5、本实用新型提供一种具有无线充电功能的无人船,全方位云台内部有三个云台步进电机,分别负责云台的俯仰,横滚和转向的各方向的转动。动力则为直接用无人船的24v供电。步进电机主要通过at89s52单片机作为控制核心,并由at89s52单片机产生相应的脉冲信号,通过i/o端口输出,送到驱动芯片l298n对脉冲信号进行梳理。而通过云台带陀螺仪并采用最小二乘法。是给单片机发出指令。使起在工作状态中平台一直保持稳定状态。升降平台10通过后台程序控制升降过程,通过蜗杆升降机3控制。无线充电rx端63、无线充电tx端21间数据通信能力强,中心偏移距离范围更宽.rx tx线圈只要有1/3tx线圈直径80mm相对,便数据通信正常,实行无线€€充电。相对t i方案,rx tx线圈至少有1/2,tx线圈直径80mm相对摆放更自由,方便。
技术特征:1.一种具有无线充电功能的无人船,包括无人船(1),其特征在于:所述无人船(1)的一侧内部固定安装有蜗杆升降机(3),所述蜗杆升降机(3)的顶部固定安装有云台机构(2),所述云台机构(2)的顶部固定安装有起降平台(10),所述起降平台(10)的顶部放置有无人机(6),所述无人机(6)的底部设置有无线充电rx端(63);所述云台机构(2)包括有第三云台步进电机(24)。
2.根据权利要求1所述的一种具有无线充电功能的无人船,其特征在于:所述无人船(1)的左端顶部设置有船载云台摄像头(7),所述船载云台摄像头(7)的外表面套设有船用玻璃罩(8),所述无人船(1)的右端两侧活动安装有机舱(4),所述无人船(1)的右端设置有通信模块(5),所述无人船(1)的底部右端固定安装有涵道推进器(9)。
3.根据权利要求2所述的一种具有无线充电功能的无人船,其特征在于:所述无人船(1)的动力推进模式通过涵道推进器(9)采用差动推进,防水草、渔网。
4.根据权利要求2所述的一种具有无线充电功能的无人船,其特征在于:所述无人船(1)通过通信模块(5)实现4g网络控制在水域展开巡检工作,控制端在任意有4g网络场所。
5.根据权利要求1所述的一种具有无线充电功能的无人船,其特征在于:所述无人机(6)的内部设置有锂离子电池(62),所述锂离子电池(62)的左侧且位于无人机(6)的左侧上活动安装有电池仓盖(61),所述无人机(6)的顶部设置有机载云台摄像头(65),所述机载云台摄像头(65)的外表面且位于无人机(6)的顶部套设有玻璃罩(66),所述无人机(6)的底部设置有无线充电rx端(63)。
6.根据权利要求5所述的一种具有无线充电功能的无人船,其特征在于:所述无人机(6)基于4g/5g网络的远程自动化控制,所述无线充电rx端(63)包括有mcu,整流桥,ldo,charger芯片,以及lc谐振tank。
7.根据权利要求1所述的一种具有无线充电功能的无人船,其特征在于:所述第三云台步进电机(24)的顶部设置有第二云台步进电机(23),所述第二云台步进电机(23)的左端设置有第一云台步进电机(22),所述第一云台步进电机(22)的一端固定安装有无线充电tx端(21),所述无线充电tx端(21)的顶部固定安装起降平台(10)。
8.根据权利要求7所述的一种具有无线充电功能的无人船,其特征在于:所述无线充电tx端(21)包括有mcu,功率全桥,以及由电感和电容组成的lc谐振tank,所述云台机构(2)采用的步进电机主要通过at89s52单片机作为控制核心,并由at89s52单片机产生相应的脉冲信号,通过i/o端口输出,送到驱动芯片l298n对脉冲信号进行梳理。
技术总结本技术公开了一种具有无线充电功能的无人船,涉及无人船载无人机技术领域,包括无人船,所述无人船的一侧内部固定安装有蜗杆升降机,所述蜗杆升降机的顶部固定安装有云台机构,所述云台机构的顶部固定安装有起降平台,所述起降平台的顶部放置有无人机,所述无人机的底部设置有无线充电RX端;所述云台机构包括有第三云台步进电机。本技术三轴云台化的起降平台系统为无人机提供了一个完全静止的起降平台。完美的克服了以上的由于水面晃动给无人机带来的起降困难等问题,来自动化实现无人机稳定在无人船上起降,并实现对无人机进行无线充电。技术研发人员:李然,乐放受保护的技术使用者:重庆翼动科技有限公司技术研发日:20231108技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/263065.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表