一种用于海水浴场安全监控的仿生机器鱼
- 国知局
- 2024-08-05 12:17:35
本发明属于仿生机器人,特别涉及一种用于海水浴场安全监控的仿生机器鱼。
背景技术:
1、传统的海水浴场安全主要依靠安全员游泳或者驾驶摩托艇进行救援,受限于安全员精力以及体力的同时,对紧急情况判断不够准确,常常会发生判断失误造成的事故。另一方面,符合条件的安全员往往薪资要求较高,对海水浴场来说是一笔不小的负担。
2、水下机器人以其相对低廉的价格和高效的运作使其在各个领域大放异彩,但传统的水下机器人在水中的机动性存在一定不足,续航时间也难以保障。同时其与鱼类相差较大的外形也使得其在海水浴场较为突兀。另一方面,传统的单目相机识别在各个方面都有局限性:清晰度、准确性、其他数据获取等等。
3、因此,如何提供一种用于海水浴场安全监控的仿生机器鱼,能够兼具稳定性、高效性和长续航,更好地融入海水浴场环境,已经成为一个亟待解决的技术问题。
技术实现思路
1、本发明实施例提供一种用于海水浴场安全监控的仿生机器鱼,能够兼具稳定性、高效性和长续航,更好地融入海水浴场环境。
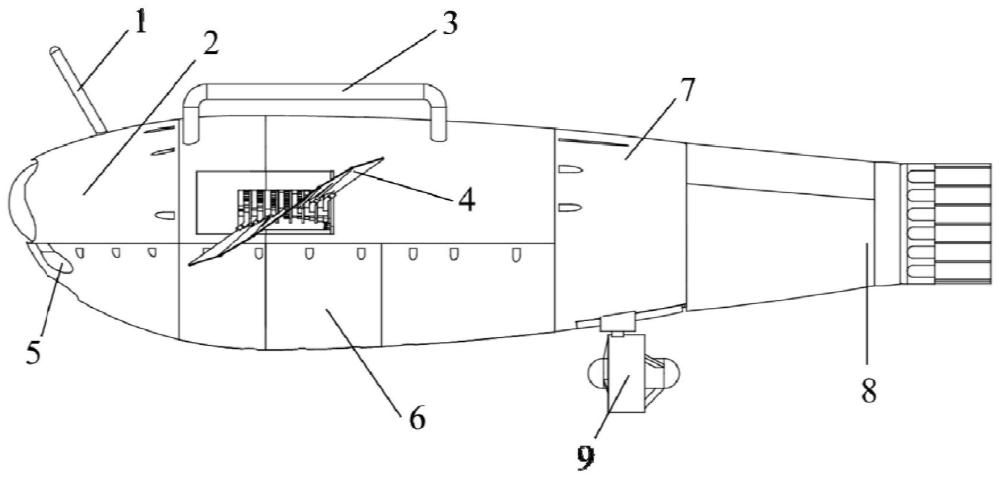
2、本发明实施例中,提供一种用于海水浴场安全监控的仿生机器鱼于,所述仿生机器鱼,包括:通信定位装置、协同任务处理系统、运动控制系统、双目视觉系统和救援装置。
3、所述通信定位装置,设置于所述仿生机器鱼的鱼头舱,用于所述仿生机器鱼与其他机器鱼或基站进行至少包括机器鱼的位置以及位姿信息、机器鱼任务日志及机器鱼剩余电量的实时信息交换;
4、所述协同任务处理系统,包括处理器、至少包括陀螺仪和速度传感器的传感器,以及通信接口;所述处理器用于对传感器数据以及其他机器鱼和基站传输的数据进行收集、分析和整合传感器数据以及其他机器鱼和地面基站传输的数据,执行集成分布式算法,使得所述仿生机器鱼能够共享任务规划和位置信息;
5、所述运动控制系统,包括在所述仿生机器鱼胸鳍和尾鳍安装的舵机和推进器;所述胸鳍和尾鳍上的舵机负责姿态和方向调整以及提供日常巡逻任务的主要推动力;在救援任务中,由设置在所述尾鳍的推进器提供主要推进力;
6、所述双目视觉系统,包括安装在所述仿生机器鱼鱼头舱的视频采集单元和图像处理单元;所述视频采集单元获取水下环境的立体视觉信息,所述图像处理单元对所述立体视觉信息进行图像处理,判断水下人员的状态,并计算所述仿生机器鱼与障碍物和人员之间的距离;
7、所述救援装置,包括设置在所述仿生机器鱼鱼背上的一组把手结构以及设置在所述仿生鱼的鱼体第一舱室内的声音传输装置。
8、进一步地,所述协同任务处理系统,引入分布式协同策略,通过集成分布式算法,所述仿生机器鱼共享任务规划和位置信息,进行实时的任务分配和状态同步。
9、进一步地,所述仿生机器鱼,包括:
10、在执行巡逻任务时,各仿生机器鱼的协同任务处理系统互相报告各自的任务规划及其位置信息,确定不存在遗漏或任务重复区域后开始执行任务;
11、在执行救援任务时,各仿生机器鱼之间互相报告彼此位置,确定距离被救人员最近的机器鱼率先抵达相关区域。
12、进一步地,所述双目视觉系统,模拟人类双眼视觉,获取水下环境的立体视觉信息,所述图像处理单元基于立体视觉和目标识别算法,识别判断水下环境中的障碍物,并判断水下人员的位姿是游玩还是落水需要救援,同时测算距离信息,并将测算结果反馈于协同任务处理器。
13、进一步地,所述把手结构设置一个用于通过温度变化判断被救援人员是否安全握紧所述把手结构的温度传感器。
14、进一步地,所述声音传输装置为用于提醒被救援人员安全抓紧所述把手结构的扬声器。
15、进一步地,所述鱼体第一舱室设置一个用于为所述协同任务处理系统提供能源支持的电源装置。
16、本发明所带来的有益效果如下:
17、从上述方案可以看出,本发明实施例提供一种用于海水浴场安全监控的仿生机器鱼,包括:通信定位装置、协同任务处理系统、运动控制系统、双目视觉系统和救援装置。通信定位装置,设置于鱼头舱,用于仿生机器鱼与其他机器鱼或基站进行实时信息交换;协同任务处理系统,包括处理器、至少包括陀螺仪和速度传感器的传感器,以及通信接口;运动控制系统,包括在仿生机器鱼胸鳍和尾鳍安装的舵机和推进器;双目视觉系统,包括安装在仿生机器鱼鱼头舱的视频采集单元和图像处理单元;救援装置,包括设置在仿生机器鱼鱼背上的一组把手结构以及设置在所述仿生鱼的鱼体第一舱室内的声音传输装置。本发明技术方案,能够兼具稳定性、高效性和长续航,更好地融入海水浴场环境。
技术特征:1.一种用于海水浴场安全监控的仿生机器鱼,其特征在于,所述仿生机器鱼,包括:通信定位装置、协同任务处理系统、运动控制系统、双目视觉系统和救援装置;
2.根据权利要求1所述的一种用于海水浴场安全监控的仿生机器鱼,其特征在于,所述协同任务处理系统,引入分布式协同策略,通过集成分布式算法,所述仿生机器鱼共享任务规划和位置信息,进行实时的任务分配和状态同步。
3.根据权利要求1所述的一种用于海水浴场安全监控的仿生机器鱼,其特征在于,所述仿生机器鱼,包括:
4.根据权利要求1所述的一种用于海水浴场安全监控的仿生机器鱼,其特征在于,所述双目视觉系统,模拟人类双眼视觉,获取水下环境的立体视觉信息,所述图像处理单元基于立体视觉和目标识别算法,识别判断水下环境中的障碍物,并判断水下人员的位姿是游玩还是落水需要救援,同时测算距离信息,并将测算结果反馈于协同任务处理器。
5.根据权利要求1所述的一种用于海水浴场安全监控的仿生机器鱼,其特征在于,所述把手结构设置一个用于通过温度变化判断被救援人员是否安全握紧所述把手结构的温度传感器。
6.根据权利要求1所述的一种用于海水浴场安全监控的仿生机器鱼,其特征在于,所述声音传输装置为用于提醒被救援人员安全抓紧所述把手结构的扬声器。
7.根据权利要求1至6任一项所述的一种用于海水浴场安全监控的仿生机器鱼,其特征在于,所述鱼体第一舱室设置一个用于为所述协同任务处理系统提供能源支持的电源装置。
技术总结本发明提供一种用于海水浴场安全监控的仿生机器鱼,包括:通信定位装置、协同任务处理系统、运动控制系统、双目视觉系统和救援装置。通信定位装置,设置于鱼头舱,用于仿生机器鱼与其他机器鱼或基站进行实时信息交换;协同任务处理系统,包括处理器、至少包括陀螺仪和速度传感器的传感器,以及通信接口;运动控制系统,包括在防生机器鱼胸鳍和尾鳍安装的舵机和推进器;双目视觉系统,包括安装在仿生机器鱼鱼头舱的视频采集单元和图像处理单元;救援装置,包括设置在仿生机器鱼鱼背上的一组把手结构以及设置在所述仿生鱼的鱼体第一舱室内的声音传输装置。本发明技术方案,能够兼具稳定性、高效性和长续航,更好地融入海水浴场环境。技术研发人员:韩阳,安炎炯,李若欣,孙越受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/261999.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表