一种可水下勘探的水下机器人
- 国知局
- 2024-08-05 13:11:10
本技术涉及水下机器人,尤其涉及一种可水下勘探的水下机器人。
背景技术:
1、rov在海洋研究、近海油气开发、矿物资源调查取样、打捞和军事等方面都获得广泛的应用,观察级rov的核心部件是水下推进器及摄像系统,有时辅以导航、深度传感器等常规传感器。本体尺寸和重量较小,负荷较低,成本较低。近年来,随着国内海上油气资源勘探力度的不断加大以及海上打捞作业需求的增加,国内对于水下机器人产品的消费量日渐增加,除此之外,各类海洋监测活动也逐渐增加了对于水下作业机器人的需求。rov水下探测工程行业作为rov应用领域分支之一,是其市场的主导力量。但在发明人实际设计rov水下机器人过程中发现由于水下环境复杂、曝光严重不足的问题,会导致水下探测机器人数据传输失帧,图像模糊不清。
技术实现思路
1、有鉴于此,本实用新型的目的在于提出一种可水下勘探的水下机器人,能够增强传输实时性。
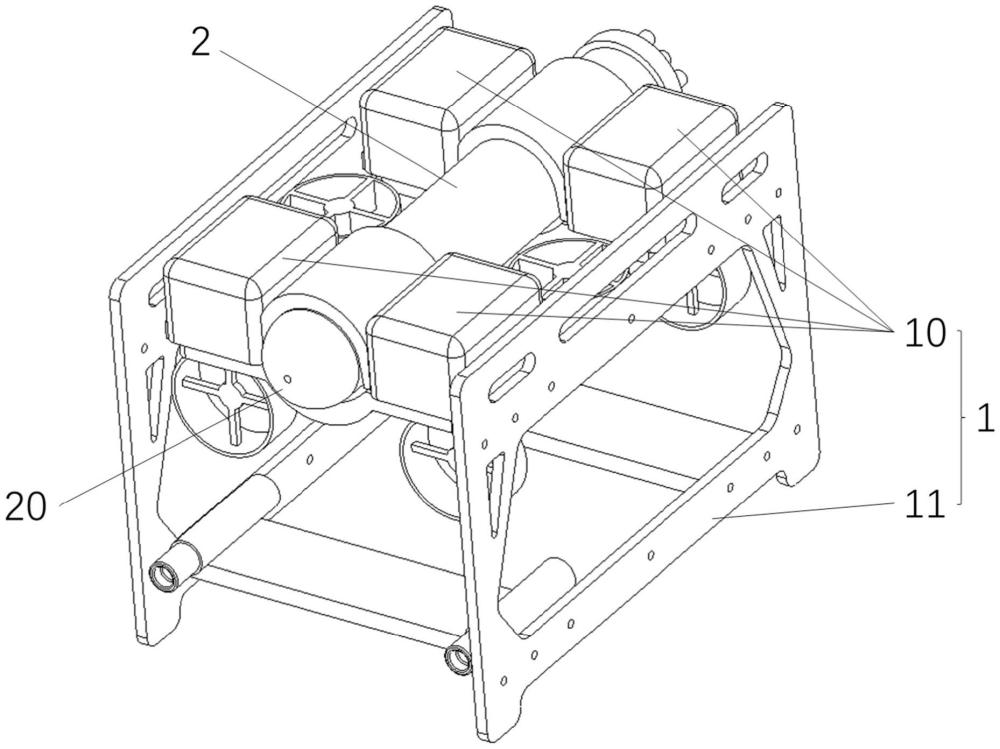
2、根据本实用新型的一个方面,提供一种可水下勘探的水下机器人,该水下机器人为旋翼式水下机器人,该机器人包括:载体框架及壳体,以及,设置于载体框架的密封舱;
3、该密封舱内设置有控制模块;该控制模块通过六类网线和/或无线通讯单元电连接有上位机,该上位机用于收发控制信号以及勘探信号;
4、该密封舱的前端设置有光学摄像系统,尾部设置有流体压力传感器,该流体压力传感器与该控制模块电连接。
5、在上述技术方案中,本实施例方案适用于旋翼式水下机器人。为了提高通讯传输的实时性,本实施例采用无线与有线的组合。有线部分把原本传输数据的五类网线改用传输数据速率更快带宽更高的六类网线,提升整体数据传输可靠性和效率。无线部分利用局域网的方式,来分担有线部分的数据传输压力,提高有线部分的传输效率。
6、在一些实施例中,所述壳体和所述载体框架表面喷涂有氟素电子防护纳米涂层剂。
7、在上述技术方案中,外壳机身覆盖氟素电子防护纳米涂层剂,可以防止氧气和湿气对电子器件的氧化腐蚀。这有助于延长器件的使用寿命和稳定性。
8、在一些实施例中,所述无线通讯单元采用蓝牙5.0通讯单元。
9、在上述技术方案中,添加蓝牙5.0模块实现短距离局域网数据传输,兼容不同复杂场景的应用。同时,蓝牙5.0的传输速度最高可以达到2mbps,能够有效分担有线部分传输压力,进一步地,蓝牙5.0通讯距离最远可以达到300米,有助于远程水下通讯连接,扩大勘探范围。水下机器人还可以通过蓝牙5.0创建更复杂的连接系统,比如beacon或位置服务。因此通过蓝牙设备发送的广告数据可以发送少量信息到目标设备中,甚至无需配对。同时本案还考虑到续航的问题,而蓝牙5.0功耗较低,避免影响水下机器人的续航能力。
10、在一些实施例中,所述密封舱内还设置有聚合物锂离子电池,该电池用于为所述水下机器人提供动力支持。
11、在上述技术方案中,动力系统采用聚合物锂离子电池,持久续航,延长水下作业时间。
12、在一些实施例中,所述光学摄像系统包括:
13、光学摄像机,以及,设置于该光学摄像机前端的镜头切换装置;
14、该镜头切换装置包括一驱动装置,以及,转动架和设置于转动架的若干光学镜头;
15、该转动架连接于驱动装置,且通过驱动装置沿一转轴转动,使得若干光学镜头任一光轴与该光学摄像机光轴重合。
16、在上述技术方案中,发明人发现,现有的适用于水下环境的摄像机多为电子变焦,在水下环境勘探时,电子变焦会导致清晰度下降。因此,为了进一步提高摄像的清晰度,本实施例设置一驱动装置和转动架,通过转动架上设置若干光学镜头,来实现光学变焦,降低清晰度下降程度。需要注意的是,由于摄像机的选型不同,适用的光学镜头不同、设置的尺寸不同,本实施例不加以限定。
17、在一些实施例中,所述转动架为四分之一半圆片,且材质为碳纤维。
18、在上述技术方案中,考虑到密封舱内还需要进一步设置其他模块以及其他探测器的遮挡,本实施例中将转动架设为四分之一半圆片,实现光学摄像系统的小型化,同时避免影响到其他探测器,如声纳、照明、测距、红外热成像等。
19、在一些实施例中,所述转动架靠近所述光学摄像机一侧设置有黑色绒布层,且该黑色绒布层厚度为1-2mm,当所述转动架转动时,所述黑色绒布层与所述光学摄像机的镜头镜片抵接。
20、在上述技术方案中,由于本实施例是在原本的光学摄像机的基础上增设的光学镜头,光学镜头与光学摄像机之间存在一定的光学间隙,密封舱内的线路可能会因为运动时的晃动进入光学间隙。同时,水下照明光强较大,杂光通过光学间隙进入光学镜头或光学摄像机,导致图像劣化。为此,在本实施例中,设置了黑色绒布层,一来可以实现遮光的效果,二来转动架转动时不易刮伤光学摄像机的前镜片。进一步地,当所述转动架转动时,所述黑色绒布层与所述光学摄像机的镜头镜片抵接,使得在转动过程中也可擦拭光学摄像机的前镜片,提高避免切换时灰尘吸附在光学摄像机的前镜片。
21、在一些实施例中,所述转动架材质为碳纤维
22、在上述技术方案中,由于本实施例需要转动架转动时,黑色绒布层与光学摄像机的镜头镜片抵接,如果采用塑料材质的话容易发生形变,使得光学镜头光轴与光学摄像机光轴难以较好的重合。进一步地,考虑到水下机器人的负重问题,在本实施例中的转动加选用碳纤维制成,可以同时满足上述两种需求。
23、在一些实施例中,所述光学摄像机光轴与所述密封舱的密封透明罩中心线重合。
24、在上述技术方案中,光学摄像机光轴与密封舱的密封透明罩中心线不重合的话,图像会因为透明罩的折射发生劣化。虽然不重合的设计可以进一步提高舱内的空间利用率,但考虑到本案的目的是提高图像清晰度,因此做出上述设置。
25、在一些实施例中,所述若干光学镜头有三个,分别涵盖微距、中焦、长焦三种焦距,且三个所述光学镜头绕转轴环绕设置,光学镜头之间的夹角为30°-50°。
26、在上述技术方案中,考虑到实际的应用以及舱内的空间,本实施例设定光学镜头有三个,分别涵盖微距、中焦、长焦三种焦距。该种光学镜头可以是适用于手机的外戴式的光学镜头,方便购买,同时小型化较好。进一步考虑到空间利用率,采用环绕设置的方式,同时光学镜头之间的夹角为30°-50°。
技术特征:1.一种可水下勘探的水下机器人,其特征在于,该水下机器人为旋翼式水下机器人,该机器人包括:载体框架及壳体,以及,设置于载体框架的密封舱;
2.如权利要求1所述的一种可水下勘探的水下机器人,其特征在于,
3.如权利要求1所述的一种可水下勘探的水下机器人,其特征在于,
4.如权利要求1所述的一种可水下勘探的水下机器人,其特征在于,
5.如权利要求1所述的一种可水下勘探的水下机器人,其特征在于,
6.如权利要求5所述的一种可水下勘探的水下机器人,其特征在于,
7.如权利要求6所述的一种可水下勘探的水下机器人,其特征在于,
8.如权利要求7所述的一种可水下勘探的水下机器人,其特征在于,
9.如权利要求5所述的一种可水下勘探的水下机器人,其特征在于,
10.如权利要求5所述的一种可水下勘探的水下机器人,其特征在于,
技术总结本技术公开了一种可水下勘探的水下机器人。其中,所述水下机器人为旋翼式水下机器人,该机器人包括:载体框架及壳体,以及,设置于载体框架的密封舱;该密封舱内设置有控制模块;该控制模块通过六类网线,和/或无线通讯单元,与上位机连接,用于收发控制信号以及勘探信号;该密封舱前端设置有光学摄像系统,尾部设置有流体压力传感器,该流体压力传感器与该控制模块电连接。本技术为了提高通讯传输的实时性,采用无线与有线的组合。有线部分把原本传输数据的五类网线改用传输数据速率更快带宽更高的六类网线,提升整体数据传输可靠性和效率。无线部分利用局域网的方式,来分担有线部分的数据传输压力,提高有线部分的传输效率。技术研发人员:彭圣豪,徐裕森,郑新锃,廖炳坤,凌前琪,张伟疆,肖伟东受保护的技术使用者:厦门理工学院技术研发日:20231227技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/266214.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。